星载空间激光通信系统设计与实现
2020-09-11谢小平高铎瑞韩俊锋贺应红
谢小平,高铎瑞*,汪 伟,韩俊锋,贺应红
(1.中国科学院 西安光学精密机械研究所,陕西 西安 710119;2.中国科学院大学,北京 100049)
0 引言
空间激光通信经过多年探索,取得了突破性进展,已成为解决微波通信速率瓶颈、构建天基宽带网、实现对地观测海量数据实时传输的有效手段。激光通信系统具有体积小、质量轻以及功耗低等特点,非常适合作为卫星有效载荷,能够满足未来航天活动日益增长的通信需求[1-2]。国内外对空间激光通信系统进行了大量的研发,并进行一系列在轨验证计划部署。以美国、欧洲和日本等为代表的国家,对空间激光通信系统所涉及的各项关键技术展开了全面深入的研究,开发出多套卫星激光通信系统,并成功完成多项在轨试验,技术基本成熟,已经开始规划建设可覆盖全球的天基激光通信网络[3-9]。我国目前正在部署空天地一体化信息网络,其中空间激光链路是该网络的重要组成部分,是数据传输的高速路。西安光机所根据商业卫星低轨星座组网需求,已研发了一套用于低轨的星载空间激光通信系统。
1 系统组成
星载空间激光通信系统组成如图1所示,由光通信机和PAT主机及电控箱两部分组成。PAT主机和光通信机之间通过光纤组件连接,PAT主机和PAT电控箱之间通过电缆组件连接。光通信机主要完成高速激光信号的调制、解调;PAT主机是高精度跟瞄的执行机构,主要完成空间光信号的发射和接收;PAT电控箱是高精度跟瞄的控制机构,主要控制PAT主机完成初始指向、扫描捕获及实时跟踪等。根据使用要求的不同,PAT主机安装在舱外,光通信机和PAT电控箱安装在舱内。

图1 星载空间激光通信系统Fig.1 Satellite-borne space laser communication system
2 光通信机设计与实现
2.1 DPSK激光通信系统
光通信机的基本功能是将高速基带电信号调制到光载波上,放大发射;同时接收微弱光信号,解调恢复出基带电信号。根据调制方式的不同,空间激光通信较为成熟的技术体制主要分为两大类:非相干通信体制和相干通信体制。非相干通信体制主要采用强度调制直接检测(Intensity Modulation Direct Detection,IM-DD)方式,具有结构简单、可靠性高等优点,但接收灵敏度较差。相干通信体制主要采用相位调制/相干探测方式,利用本振光与信号光的相干叠加,使信号光功率增大,具有高灵敏度、高调制速率以及抗干扰能力强等优点。
相干通信体制又可以分为二进制相移键控(Binary Phase Shift Keying,BPSK)/零差(外差)相干探测、差分相移键控(Differential Phase Shift Keying,DPSK)/自差相干探测等。相较而言,在获得同样的传输速率和灵敏度前提下,DPSK/自差相干探测体制对激光器线宽要求更低。国际上美国的LCRD系统和日本的JDRS系统均采用这种技术方案[10-12]。DPSK/自差相干探测体制的主要优点如下:
① 对激光器线宽、频率稳定性要求比零差、外差更加宽松;
② 无需本振激光器,无需90°、180°光混频器,无需相位锁定,与零差、外差相比系统结构更简单,技术成熟度更高;
③ 接收端采用前置弱光放大器增大传输衰减的微弱光功率,配合自差延迟相干解调,接收灵敏度可以达到零差相干探测的精度。
本系统采用DPSK/自差相干探测技术方案,如图2所示,整个系统由发射和接收两部分组成。

图2 DPSK高灵敏度激光通信系统Fig.2 Schematic of DPSK high sensitivity laser communication system
工作流程为:在发射端高速基带电信号经过差分预编码后进入电光调制器,预编码后的信号以相位变化的形式加载到光载波上,通过掺铒光纤放大器对信号光进行放大发射;在接收端接收到的微弱光信号经前置光预放大器放大,并通过光滤波器进行匹配滤波降噪处理,随后通过延迟干涉解调仪将光信号分成两路,其中一路附加1 bit延迟,然后两路光耦合干涉,从而将相位信息解调恢复出强度信息(多普勒频移补偿装置用来补偿卫星相对运动引起的多普勒频移),两路强度信号由平衡探测器接收转换成基带电信号。
2.2 器件选择
在器件选型时,电子元器件选择航天目录内的器件,并且满足降额、辐照等要求。光电及光纤器件优选符合Telcordia GR-468标准的有源光电器件和符合Telcordia GR-1221,GR-1209标准的无源光纤器件,并根据空间环境要求进行完备的器件级空间环境适应性试验。
光电器件的选择、筛选和鉴定试验与电子设备工程(Electronic Equipment Engineering,EEE)器件的过程类似,但针对光电器件进行了修改。宇航级光电器件认证的流程如图3所示。

图3 宇航级光电器件认证流程Fig.3 Aerospace-grade photoelectric devicecertification process
2.3 光通信机
研制的光通信机如图4所示,铝制机箱的机壳厚度3 mm,可以提供良好的辐射屏蔽、出色的导热性以及良好的结构完整性。安装面不做表面处理,其余表面黑色阳极氧化。光通信机采用垂直堆叠的三层结构,分别是发射层、接收层和控制层。每层通过分区以优化热性能和结构性能,并完成集成和测试。模块化分层的优点是每个单层都可以并行集成和测试,减少了光通信机集成和测试的时间,并保证了设计的灵活性,以满足不断变化的需求。

图4 光通信机Fig.4 Optical communication module
如图4(b)所示,光通信机第一层是光信号发射层,由光电器件和光纤器件构成,安装于卫星表面,是最好的散热层(也是热耗最高的一层),便于将这些组件保持在适中的温度,从而提高性能和可靠性。第一层包括用于自检和双向通信的DFB激光器,以及用于光信号放大的高功率光放大器。为了保证光放大器的可靠性,对泵浦源进行了冗余设计。该层还包括高速光调制器和自动偏压控制器,所有器件的供电统一由该层的供电转接板提供。
第二层是光信号接收层,由光电器件和光纤器件构成,包括前置光预放大器、光滤波器及延迟干涉解调仪等,并且第二层与第一层在内部形成自闭环,用于完成自测功能。所有器件的供电统一由该层的供电转接板提供。
第三层是控制层,主要由FPGA等电路构成,包括高速数字处理电路、多普勒补偿电路及二次电源电路等。第一层、第二层的供电和控制信号都来自第三层。
2.4 性能测试
DPSK相干光通信机主要技术指标如表1所示,误码率随接收光功率的变化曲线如图5所示。接收光功率-45 dBm时误码率2.4×10-6,接收光功率-44 dBm时误码率3.0×10-7,接收光功率每增加1 dB,误码率减小一个量级,大于-41 dBm时实现零误码接收。

表1 光通信机主要参数Tab.1 Optical communication module parameters

图5 光通信机误码曲线(不含纠错编码)Fig.5 BER curve of optical communication module (no error correction coding)
3 PAT主机及电控箱设计与实现
PAT主机及电控箱对激光通信链路的建立起到重要作用,主要实现空间光信号收发,瞄准捕获跟踪等功能,解决卫星平台的振动、卫星之间的相对运动等引起的激光指向问题,维持点对点链路之间的通信稳定[13]。按实现的功能可以划分为光学天线及中继光路、粗跟踪单元、精跟踪单元和提前量单元四部分,如图6所示。

图6 PAT主机及电控箱Fig.6 Schematic of PAT module and controller electronics
3.1 光学天线及中继光路
光学天线将通信光和信标光发射到对方空间激光通信系统所在空间,同时接收来自对方的信标光和通信光。光学天线采用RC反射式的无焦光学系统,作为接收、发射通道的共用部件,安装在粗跟踪单元的二维跟踪转台上,随转台一起转动实现视线方向的两维调节。
中继光路主要包括通信发射支路、信标发射支路、通信接收支路、信标接收支路、精跟踪接收支路以及分光组件等。它与二维跟踪转台底座固定连接,实现对光束的整形、扩束、分光、滤光以及折反射等。光学天线与中继光路共同构成完整的光学系统,将己方的光信号发射到空间,将对方的光信号接收到探测器。
3.2 粗跟踪单元
粗跟踪单元由二维跟踪转台、粗跟踪相机、信标激光器、转台伺服模块以及PAT主控模块等组成。二维跟踪转台、粗跟踪相机、信标激光器安装于PAT主机内;转台伺服模块、PAT主控模块安装在PAT电控箱内。
信标激光器用于产生特定波长的信标光,其输出的光能量经由中继光路内部的信标发射支路耦合进入光学天线对外发射,供对方激光通信系统进行光束初始捕获和粗跟踪。二维跟踪转台是光学天线的承载体,装配有同步电机和高精度编码器,用于光学天线光轴指向的两维大范围调节。转台伺服模块由电路板及其固定支架构成,实现对二维跟踪转台的驱动控制。粗跟踪相机安装在中继光路内部,位于信标接收支路末端,用于探测接收到的粗跟踪信标光,并提取出目标的脱靶量,供PAT主控模块使用。PAT主控模块根据脱靶量信息经由转台伺服模块控制二维跟踪转台进行目标跟踪。
3.3 精跟踪单元
精跟踪单元由精跟踪振镜、精跟踪伺服模块以及精跟踪相机等组成。精跟踪振镜和精跟踪相机安装于PAT主机内,精跟踪伺服模块安装在PAT电控箱内。
精跟踪振镜由振镜结构本体和反射镜两部分构成,位于中继光路内部,能够带动其上的反射镜进行二维转动,实现接收光束指向的精细调整。精跟踪伺服模块用于实现对精跟踪振镜的运动控制;它接收PAT主控模块输出的控制信号,对粗跟踪的残差和卫星姿态扰动进行抑制。精跟踪相机安装在中继光路内部,位于精跟踪接收支路末端,用于探测接收到的通信光,并采用精跟踪算法提取出目标的脱靶量,供PAT主控模块进行精跟踪位置闭环,实现通信光束的高精度对准。
3.4 提前量单元
提前量单元由提前量振镜、提前量伺服模块组成,在PAT主控模块控制下工作。提前量振镜安装于PAT主机内,位于中继光路内的发射光路上。提前量伺服安装在PAT电控箱内,它接收PAT主控模块输出的模拟控制信号,驱动提前量振镜偏转,补偿由于光束弛豫时间带来的视轴指向偏离。
3.5 扫描策略
扫描捕获是卫星激光通信建立通信链路的关键[14]。由于卫星姿态和轨道等存在测量误差,在寻找目标时,只能知道目标出现的不确定区域。另外,卫星姿态漂移、卫星之间相对运动、卫星平台振动以及空间背景光的干扰,都会使捕获难度增大。因此,扫描策略的选取需要综合考虑不确定区域、扫描方式、捕获时间及捕获概率等因素,使扫描效果达到最佳状态。
常见的信标光扫瞄方式主要包括矩形扫瞄、螺旋扫瞄及矩形螺旋扫瞄等。矩形扫描即逐行扫瞄,虽然能够有效扫瞄整个区域,易于设计与实现,但扫描效率较低。若考虑到目标出现在不确定区域的概率为高斯或瑞利分布,可以采用螺旋扫描,它以最密的螺线轨迹从目标出现的概率最大区域开始,效率较高,但其不足在于会对较边缘处的目标产生漏扫,可以通过加大重叠因子的手段来降低漏扫概率,但这是以牺牲捕获时间为代价。
矩形螺旋扫瞄结合了前二种方式的优点,如图7(a)所示,扫瞄也是从概率密度最大处开始,扫瞄间隔重叠小,比螺旋扫瞄方式更易于实现。另外,在确定扫瞄范围的情况下,矩形螺旋扫瞄的平均捕获时间小于矩形扫瞄和螺旋扫描。本系统设计有信标光,其发散角较大;并从工程角度出发,兼顾扫瞄效率和捕获概率,采用矩形螺旋扫描。
为了增强系统的可靠性,除了利用信标光进行捕获外,同时设计了直接利用信号光进行扫描捕获的功能。利用二维转台对不确定区域进行大间距粗扫描,利用提前量振镜在粗扫描两点间进行小范围快速扫描,即采用粗精结合的复合扫描方式,复合螺旋扫描示意图如图7(b)所示。

图7 扫描模式Fig.7 Scanning mode
3.6 PAT主机及电控箱
研制的PAT主机如图8(a)所示,主要包括光学天线、中继光路、L型二维跟踪转台、精跟踪振镜、提前量振镜、粗跟踪相机、精跟踪相机及信标激光器等。PAT电控箱如图8(b)所示,主要包括PAT主控模块、转台伺服模块、精跟踪伺服模块和提前量伺服模块;配套软件包含主控模块控制软件、主控模块FPGA软件、粗跟踪相机FPGA软件和精跟踪相机FPGA软件。

图8 PAT主机及电控箱Fig.8 PAT module and controller electronics
3.7 性能测试
对PAT主机及电控箱进行性能指标测试,各光轴最大同轴偏差小于3 μrad,波像差优于0.018λ,如图9(a)和图9(b)所示。在摇摆台摇摆幅值3°、摇摆频率0.16 Hz及叠加SILEX微振动条件下测得方位跟踪精度2.09 μrad(3σ),俯仰跟踪精度2.32 μrad(3σ),两轴综合精度3.12 μrad(3σ),如图9(c)和图9(d)所示。PAT主机及电控箱主要参数如表2所示。

表2 PAT主机及电控箱主要参数Tab.2 PAT module and controller electronics parameters

图9 PAT主机及电控箱性能测试图Fig.9 PAT module and controller electronics performance testing
4 环境试验
4.1 力学试验
为了检验星载空间激光通信系统经受振动试验载荷的能力,是否达到可靠性要求,将光通信机、PAT主机及电控箱有效载荷沿X、Y、Z三个方向安装在振动平台做力学试验,如图10所示。

图10 力学环境试验Fig.10 Mechanical environment test
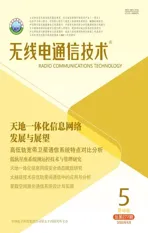
力学试验包括随机振动筛选试验、正弦振动试验和随机振动试验。力学试验结果如表3所示。
表3 力学试验结果Tab.3 Mechanical test results
由表3可以看出,力学试验前后星载空间激光通信系统接收光功率-44 dBm时,误码率为2.3×10-7~5.8×10-7,并无明显劣化,系统性能稳定。
4.2 热学试验
热学试验包括热循环试验和热真空试验。热循环试验共计14.5个循环,每个温度循环峰值和谷值的停留时间为2 h。对星载空间激光通信系统进行了热学环境测试,监测接收光功率-44 dBm时的系统误码率等参数。热学试验结果如图11所示,可以看出,热试验过程中光通信机接收光功率-44 dBm时误码率为5.4×10-8~7.6×10-7,并无明显劣化,系统性能稳定。

图11 热学环境试验结果Fig.11 Thermal environment test results
5 结束语
基于DPSK星载空间激光通信系统,从光通信机和PAT主机与电控箱两方面进行了详细介绍。该终端工作在LEO轨道,可以实现低轨星间、低轨-高轨、低轨-地的空间激光通信。系统通信波长1 550 nm波段、通信速率5 Gbit/s、口径100 mm、方位转动范围-175°~+175°,俯仰转动范围-90°~+90°,跟踪精度小于3.12 μrad(3σ)、误码率优于3×10-7@-44 dBm(不含纠错编码)。该系统通过了力学、热学等空间环境适应性试验,满足在轨运行要求,可为我国空天地一体化信息网络中的空间激光链路提供关键技术和核心装备支撑。