基于GNSS的全电推进SmallGEO卫星自主入轨方法
2020-09-11王昊光李国通石碧舟蒋桂忠武国强
王昊光,李国通,石碧舟,张 军,蒋桂忠,沈 苑,武国强
(1.上海微小卫星工程中心,上海 200120;2.中国科学院微小卫星创新研究院,上海 200120)
0 引言
天地一体化信息网络是以地面互联网和移动通信网为依托,以天基网络为拓展,采用统一技术架构、统一技术体制、统一标准规范构建的信息基础设施。天地一体化信息网络组成包括天基骨干网、天基接入网和地基节点网。建成后,将使中国具备全球时空连续通信、区域大容量通信、高机动全程信息传输等能力。
天基骨干网是天地一体化信息网络实现天基组网、地网跨代、天地互联的重要依托,由地球同步轨道上多个骨干节点互联组网而成,同时又与天基接入网、地基节点网互联,提供大容量信息传送能力,为天基、空基及重要地表用户提供全球范围内宽带接入与数据传输服务。天基骨干网节点卫星中的两颗卫星采用中科院微小卫星创新研究院的全电推SmallGEO平台。该平台将在国内首次采用霍尔推力器完成从过渡轨道到地球同步轨道(GTO-GEO)的转移、定点捕获和定点保持等任务。由于霍尔推力器推力小,导致卫星转移轨道段时间长达200天以上,这对地面实施测控、卫星轨道确定和轨道控制等任务提出了新的挑战。
目前,对于地球同步转移轨道设计问题可以分为两类:一类是以化学燃料推进系统为代表的脉冲变轨问题,化学推进系统推力量级大,可以在较短的时间内完成变轨,因此可以以瞬时速度增量表示变轨过程;另一类是以电推进系统为代表的连续推力变轨问题,本质上不同于脉冲变轨问题,不再存在可积分的弧段,因为施加在卫星上的推力大小和方向是随时间一直变化的,必须进行建模计算。国外对电推进变轨问题已有很多研究,并已在实际任务中得到验证。如DS1的小行星任务和SMART-1的月球探测任务。地球同步轨道卫星由运载火箭送至轨道倾角为零的地球同步转移轨道(GTO),再由星上电推进系统送入地球同步轨道(GEO),Biagioni针对该问题给出了电推进变轨策略[1]。Ocampo基于波音公司的 BSS-702SP卫星平台,研究了电推进变轨策略[2]。目前我国已经在试验卫星(实践九号、实践二十号)上完成电推进系统的点火试验,但尚无电推进变轨的实践,理论研究主要集中于以电推进为代表的小推力转移轨道优化[1-7]。
本文针对电推进系统在轨实际应用问题,研究适用于全电推进变轨的轨道确定方法和变轨方法。首先针对 GTO-GEO电推进变轨过程,设计时间最短最优制导律;然后对变轨期间的GNSS导航星可见性进行分析,设计了卫星GNSS定轨方案,最后对提出的定轨方法和轨道控制方法进行了仿真,验证其工程可行性。
1 SmallGEO平台简介
SmallGEO卫星平台配置星敏、陀螺和太阳敏感器等姿态敏感器,采用反作用轮进行姿态控制;具有4台300 mN型霍尔电推力器,安装于卫星-Z面,推进零位方向穿过卫星的质心,并配置矢量调节机构。单颗星质量约2 000~2 500 kg,总功率高于9 000 W,有效载荷容量达到500~600 kg,采用一箭双星方式入轨。图1为卫星结构示意图和电推进安装示意图。
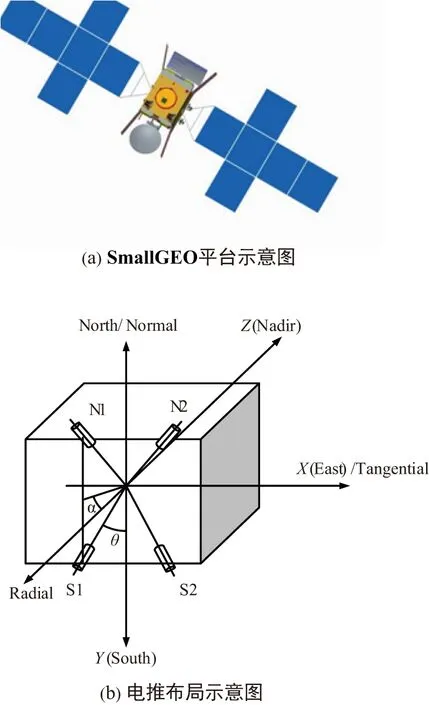
图1 SmallGEO平台和电推布局示意图Fig.1 Diagram of SmallGEO satellite and the layout of electric propulsion
SmallGEO卫星的轨道控制采用“天-地”大闭环控制方案,轨道控制系统的基本工作原理如图2所示。根据轨道控制周期,地面通过优化变轨策略计算轨道控制参数,并上注到卫星。每个控制周期内,星上通过自主确定的轨道和测量的姿态完成姿态确定,利用上注的轨控参数调整姿态,控制电推进工作完成轨道转移。下面对方案中的关键技术轨道转移策略和自主定轨方法进行描述。

图2 SmallGEO卫星姿态轨道控制系统工作原理示意图Fig.2 Diagram of orbit transfer law for SmallGEO satellite
2 电推进GEO卫星轨道转移控制策略
以SmallGEO平台为实践对象,根据天地一体信息网络任务要求,综合国内外学者小推力变轨研究成果,提出了以转移时间最短为优化目标的轨道转移控制策略。在轨道转移任务期间,推力器在除地影及其他任务需求以外的所有区域内均保持最大推力连续工作。推力器指向由卫星通过反作用轮自主控制姿态实现。
全电推进卫星轨道动力学模型采用春分点轨道根数进行描述[8-10],如式(1)所示。
(1)
其中,w=1+fcosL+gsinL,s2=1+h2+k2,μ为地球引力常数,[frftfn]T为卫星所受外力(摄动力与推力)加速度。
由于电推进的加速度远小于地球引力加速度,因此快变量L可描述成:
(2)
(3)
具体形式为:

(4)
其中,
式中,Lin,Lout为航天器进、出地影的角度,Ft为推力幅值,Fp为摄动幅值,α为推力方向向量,fp为摄动力方向向量。
取性能指标为轨道转移时间最短:
J=tf→min;
(5)
初始及末端约束:
x(t0)=x0,
x(tf)=xf;
(6)
向量α满足极大值原理的解α*的计算表达式为:
(7)
3 基于GNSS的轨道确定方法
3.1 GNSS卫星可见性分析
根据卫星运行轨道高度情况,GNSS工作大致可分为两种情况:一种为轨道高度低于导航星座轨道,通过头顶导航卫星实现定位;另一种为轨道高于导航星座轨道,观测地球对面导航卫星实现定位。
对于第二种情况,由于GNSS导航卫星发射天线方向固定指向地球,且主瓣信号发射夹角有限,所以部分GNSS信号会被地球完全遮挡,故只有当高轨航天器与GNSS导航卫星分别位于地球两侧,且传播链路不受地球遮挡时,高轨卫星接收器才能接收到GNSS信号[11-13],图3为高轨卫星接收器接收GNSS信号的传播示意图。
图3 高轨卫星接收GNSS信号传播示意图Fig.3 Diagram of GNSS signal receiving for high orbit satellite
图3中,由于导航卫星下视天线的主瓣信号张角为23°,即卫星主瓣信号覆盖GNSS星座下方的23°区域;而在地球的对侧,由于地球的遮挡形成了17.5°的扇形地影区。当高轨卫星进入地影区后,将无法接收到来自地球对侧GNSS卫星的信号,因此在高轨环境中,有效的主瓣信号覆盖区为5.5°,根据GNSS定位原理可知,为完成基于GNSS的GEO卫星定轨,主瓣的窄带区域至少要同时可见4颗GNSS卫星。
基于上述轨道转移策略,卫星需要不停地调整姿态以适应推力指向要求。考虑GPS、北斗和GLONASS三个导航星座,对不同姿态指向、不同GNSS天线安装方式的导航星可见性进行了仿真。仿真结果显示,轨道高度低于10 000 m时,对天指向下导航星不是全轨可见,但可见区域能够保证可见星数大于10颗时间超过3 h;轨道高度高于10 000 m时,保证GNSS天线对地情况下,能够保证可见星数大于10颗,实现卫星位置确定。部分仿真图如图4所示。

图4 卫星于不同高度不同指向下导航星可见数量Fig.4 Number of usable navigation satellites in different altitudes and attitudes
3.2 GNSS配置
根据上述分析结果,SmallGEO平台配置3台GNSS设备实现卫星位置确定。GNSS设备同时接收 GPS、GLONASS 和 BD 导航星信号实现卫星实时、定位、定轨,为卫星提供精确的当前轨道数据和时间信息(时间数据和PPS)。为了覆盖GTO轨道高度(200~55 000 km)以及GEO轨道,配置高、低增益天线,双天线联合解算。3个设备共享3副天线,分别安装于卫星+Z、-Z和-X面。GNSS组成原理如图5所示。其中信号处理SOC是接收模块关键部分,完成信号处理和位置解算;其他部分完成无线信号接收和解调。

图5 GNSS接收模块系统组成框图Fig.5 Diagram of GNSS receiving module system
3.3 轨道确定方法
根据GNSS导航星可见性分析及卫星平台GNSS配置情况,SmallGEO自主轨道确定方法如图6所示,其核心算法是带轨道动力学模型的卡尔曼滤波器(EKF)。利用离散的带有观测噪声和粗差的星载观测数据,结合高度非线性的动力学模型,并顾及动力学模型补偿加速度的确定性分量,运用白噪声驱动的有色动态噪声的卡尔曼滤波理论,在没有人工干预的情况下,实时获得卫星运动状态的最优估计,为卫星提供实时高精度的轨道数据。

图6 卫星自主轨道确定方法Fig.6 Diagram of autonomous orbit determination
轨道确定算法主要包括轨道动力学模型、观测方程和EKF三部分[14-15],具体描述如下。
3.3.1 轨道动力学模型
轨道动力学状态方程设计如式(8)所示:
(8)
式(8)可简写为:

(9)
式中,X=[x,y,z,vx,vy,vz]T,x,y,z,vx,vy,vz分别为卫星J2000坐标系下三轴位置速度信息;μ为地心引力常数;J2为二阶地心引力系数;Re为地球半径;ΔFx,ΔFy,ΔFz分别为三轴所受的摄动力及电推力分量。对于摄动力,主要考虑了地球非球形引力、大气、光压、日月、固体潮及经验力等对卫星的影响,分别依据相应的摄动力模型得到;而电推力大小方向则利用电推进模型及电推进喷气指令估算得到。
3.3.2 观测方程
观测方程如式(10)所示:
Δρ=HΔx,
(10)
式中,Δρ表示真空伪距和预测伪距的差;H表示观测方程系数矩阵,由伪距计算函数偏导数得到;Δx表示真实位置与外推位置之间的偏离。
(11)
3.3.3 EKF算法
基于上述小节中推导所得到的预报伪距值,GNSS卫星观测伪距值以及观测方程,利用扩展Kalman滤波(EKF)方法,即可实时获得精确的卫星位置信息。通过将轨道动力学方程转化为状态向量为残差量的线性系统,如式(12)、式(13)所示。
Δxk+1=φ(Δxk)+ωk,
(12)
Δyk=H(Δxk)+vk。
(13)
可按照以下步骤实现基于EKF的非线性系统状态实时确定。
a) 初始化
(14)
对增量分量Δx的估计值为0。
b) 预报状态变量及协方差
(15)

c) 计算扩展kalman滤波增益
(16)
d) 更新状态变量及协方差
17)
式中,Hk为观测方程中观测矩阵,Δyk则为观测残差。
e) 实现非线性系统状态向量的更新
(18)
f) 状态转移矩阵φk求取方法
(19)
4 仿真分析
为了验证上文所提出的轨道转移方法和定轨方法,进行了数学仿真,全电推进卫星参数及初始轨道根数如表1~表3所示。

表1 卫星参数Tab.1 Parameters of satellite

表2 开普勒轨道根数Tab.2 Kepler orbit parameters of satellite

表3 春分点轨道根数Tab.3 Vernal equinox orbit parameters of satellite
全电推进卫星GTO-GEO轨道转移控制策略优化结果如图7和图8所示。

图7 GTO-GEO轨道转移半长轴、偏心率和倾角变化情况 Fig.7 Response of semi-major axis,eccentricity and inclination
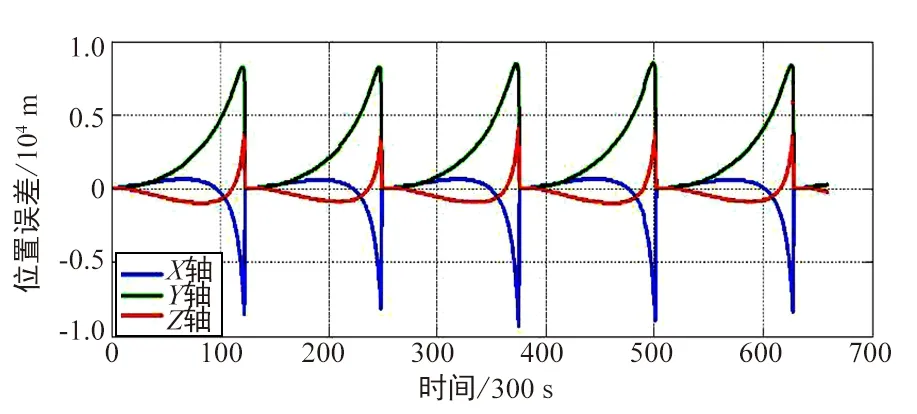
图8 GNSS滤波定轨卫星三轴位置误差(引入10 000 km 以上无GNSS信号情况)Fig.8 Error of position determined by GNSS EKF
由仿真结果可以看出,在210天左右,卫星轨道半长轴、偏心率和倾角等参数达到了目标值。半长轴控制精度优于500 m,偏心率控制精度优于10-4。在引入卫星轨道高度10 000 km以上无GNSS数据情况下,GNSS滤波定轨算法能够用动力学外推进行定轨,外推一个轨道周期位置精度优于10 km。当GNSS信号恢复后,滤波算快速收敛,位置精度满足卫星轨道控制需求。
5 结论
综上,在国内外关于小推力变轨研究成果基础上,提出了时间最优的轨道转移策略,并通过神经网络对实时协态变量进行寻优调整。根据转移段轨道情况,提出基于GNSS的轨道确定方案,对不同轨道高度和不同姿态指向下导航星可见性进行分析,确定了SmallGEO平台GNSS接收机配置方案和星上轨道确定方法。数学仿真结果表明,提出的轨道控制方法能够较好实现卫星自主入轨。研究降低了全电推进GEO卫星轨道转移过程对地面测控资源的需求,提高了卫星轨道转移自主控制能力,后续将继续开展该方法的工程应用。