天象一号卫星自主实时定轨方法与评估
2020-09-11伍蔡伦孙腾达
伍蔡伦,孙腾达,谢 松
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;2.卫星导航系统与装备技术国家重点实验室,河北 石家庄 050081)
0 引言
低轨卫星速度快、几何构型变化迅速,因此通过它播发导航修正误差将大大缩短无需地面站支持的精密定位收敛时间[2]。低轨导航增强是以北斗卫星导航为基础,通过接收北斗卫星信号实现时空基准框架的快速实时确定,同时播发包含北斗精密轨道和钟差等信息的导航增强信号实现天基监测、全球完好性增强以及全球精密定位服务的导航增强系统,是对北斗导航系统的补充、备份和增强。除了导航增强以外,低轨卫星还具有通信时延短、落地信号功率强等优点,有助于进一步提高通信时效性和抗干扰能力。美国SpaceX公司已经提出了12 000颗卫星的低轨通信星座计划来解决通信的全球覆盖问题。综上,基于通信和导航的一体化发展已经成为大势所趋。为了加快天地一体化信息网络重大项目进程,中国电科启动并发射了“天象一号”A/B双星用于移动通信和导航增强等关键技术的验证。
在低轨导航增强的实施框架中,低轨卫星轨道的高精度确定是实现导航增强的基础。本文重点描述了利用星载GNSS接收机实现自主实时定轨的详细概念、实现过程和评估结果,保证了天象一号低轨导航增强演示验证分系统的顺利实施。
1 基于GNSS的低轨卫星自主实时定轨理论
1.1 自主实时定轨概念
基于GNSS的低轨卫星自主定轨是利用GNSS测量数据确定低轨卫星轨道的过程,其步骤分为信号接收、观测量获取与预处理、初步轨道确定以及轨道改进等过程[3]。卫星自主定轨按采用的测量数据类型可分为基于GNSS的单频定轨、基于GNSS的双频定轨以及基于GNSS的双模联合定轨等,按时效性分为实时定轨和事后定轨,按是否采用动力学模型上为动力学定轨和几何学定轨[4]。
为了解决天象一号卫星的自主实时定轨问题并保证足够高的精度,天象一号星载GNSS接收机接收GPS和北斗双模四频的观测数据实现定轨,其中双频数据能够消除电离层误差,进一步提高定轨精度[5]。为了实现导航信息实时生成及播发,天象一号星载GNSS接收机采用了双模四频自主实时定轨技术。
1.2自主实时定轨流程
自主实时定轨流程采用基于GNSS伪距和多普勒测量完成动力学实时定轨,为低轨导航增强的广播电文提供精确的轨道信息。自主实时定轨流程采用模块化的思想实现,按照功能主要分为系统初始化、观测量获取、几何学轨道确定、动力学轨道积分、卡尔曼滤波以及轨道插值等模块,其自主实时定轨过程如图1所示。
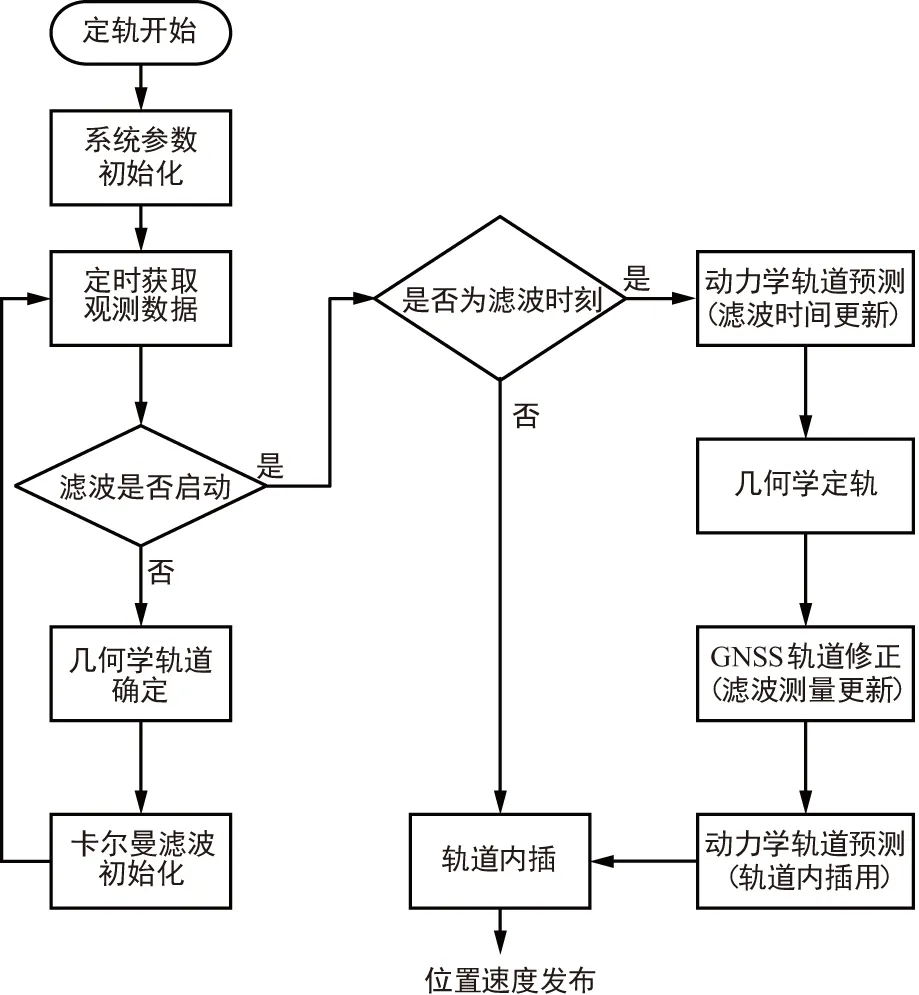
图1 自主实时定轨流程Fig.1 Autonomous real-time orbit determination process
从图1看出,基于GNSS伪距和多普勒的自主实时定轨过程如下:
① 星载GNSS接收机开机、捕获和跟踪卫星,完成首次单点定位[6];
② 进行系统初始化,主要包括定轨输入、输出以及中间变量结构体赋值等参数的复位以及卡尔曼滤波、单点定位等模块中的参数设置[7];
③ 星载接收机将实时获取观测数据流输出至观测量获取模块,包括卫星星历、伪距、多普勒等观测数据[8];
④ 几何学轨道确定模块利用观测量获取模块提供的数据对卫星进行实时单点定位和定速,在滤波开始后即探测和剔除观测量中的伪距粗差,对卡尔曼滤波测量更新用的观测数据进行质量控制;
⑤ 动力学轨道积分模块以滤波器当前的状态作为初始值,根据已知力学模型使用4阶Runge-Kutta单步数值积分器预报下一观测历元的卫星状态和状态转移矩阵,其中该模块包含卫星加速度计算模型、单步积分器等子模块[9];
⑥ 卡尔曼滤波模块采用扩展卡尔曼滤波来估计卫星状态参数,主要分为时间更新与测量更新两大子模块;时间更新子模块包含动力学轨道积分和经验加速度模型,测量更新子模块采用序贯处理伪距以避免多维矩阵求逆计算[10];
⑦ 轨道插值模块基于滤波得到的起始点轨道信息和外推得到的终止点轨道信息,采用5阶Hermite多项式插值计算出对应时刻的卫星轨道,并将轨道结果实时输出。
接收机收到定轨启动命令后,首先利用单点定位和定速确定卫星位置和速度,然后利用单点定位结果将滤波器状态量初始化,然后进入滤波定轨循环。为了减少运算复杂度,不用滤波器来确定每个历元的卫星轨道,而是在定轨过程中用滤波成功后的信息再继续进行动力学外推,最后利用滤波结果和外推结果来内插该时间段内的轨道状态。
2 基于GNSS的自主实时定轨算法实现
2.1 自主实时定轨的硬件流程设计
在天象一号卫星平台上采用GPS+BDS的双模四频接收机完成自主实时定轨,接收频点为GPS L1/L2,BDS B1/B2。星上接收机完成单点定位后,即启动自主实时定轨过程,除了星载GNSS接收机的基带处理硬件外,还包含一片专用的星上定轨处理器,即型号为TI公司的DSP处理器,其运算能力经地面评估可满足实时性要求。根据1.2节所述,结合上述处理流程,在硬件处理器内设计的实时定轨硬件流程如图2所示。

图2 基于DSP处理器的硬件流程设计图Fig.2 Hardware process design based on DSP processor
在硬件实现过程中,各个模块相对独立,共分为6类处理模块,在顶层程序中分别调用。整个硬件平台设计实现的核心和关键是处理器计算资源和内存资源的合理调度与分配。整个硬件设计通过预先计算和地面反复验证测试以保证定轨过程的稳定性和可靠性。
2.2 自主实时定轨的硬件时序设计
从2.1节可知,整个实时定轨主要分为定轨和滤波两个过程。定轨和滤波都涉及大量的数学运算,在大运算量的约束条件下为了确保定轨结果实时输出,在硬件实现上采用了多任务架构实现,即分为定轨任务、滤波任务和插值任务。为了满足实时性要求,在插值前需要计算完成修正后的定轨结果和下一个时刻的预测结果。因此,定轨任务、滤波任务以及插值任务的时序配合就非常重要,为了确保能稳定可靠输出,就需要详细设计自主实时定轨的工作时序。
自主实时定轨启动后,定轨任务包括几何学轨道确定和动力学轨道积分处理,其中动力学轨道积分处理在卡尔曼滤波定轨的结果上进行动力学外推。滤波任务则包含卡尔曼滤波模块和轨道修正模块,卡尔曼滤波器启动后根据观测量不断进行时间更新与测量更新来更新轨道状态。插值任务则利用滤波和外推结果完成Hermite插值并输出轨道状态量。由于几何学轨道确定模块、动力学轨道积分模块、卡尔曼滤波模块以及轨道插值等模块的运算复杂度均较高,因此需要划分不同的时间周期以保证系统稳定性。设定滤波周期为20 s,经核算滤波任务执行时间为6 s,定轨任务执行时间为4 s内,之后则启动插值任务每秒输出定轨结果,这样可以保证在每个历元都有可用来内插的起始轨道状态量和终止轨道状态量。综合以上分析,其自主实时定轨的硬件时序如图3所示。

图3 自主实时定轨的硬件时序设计Fig.3 Hardware timing design of autonomous real-time orbit determination
3 基于天象一号的自主定轨精度评估
为了验证自主实时定轨的正确性和可靠性,采用天象一号星载GNSS接收机进行了在轨验证,定轨模式分为单频定轨和双频定轨两种。除了输出伪距和多普勒以外,星载GNSS接收机还输出载波相位。利用载波相位实现事后精密单点定位经地面模拟器评估可以达到5 cm以内[11]。因此将低轨卫星下行的载波相位和定轨结果进行比对,可以实现对天象一号卫星自主实时定轨的可靠性和精度评估。
2019年6月5日天象一号A/B双星发射成功后,进行了导航增强相关的多项在轨测试试验,其中一项主要工作就是完成实时定轨精度的测试评估。采用天象一号星载GNSS接收机的L1频点伪距和多普勒数据进行自主实时定轨,将定轨结果与基于载波相位的精密单点定位(PPP)事后处理结果进行对比,得到定轨误差分布情况,如图4所示。经统计,其收敛时间为2 h,三维位置误差RMS值为1.106 m,速度误差RMS值为0.001 2 m/s。

图4 天象一号卫星自主实时单频定轨结果Fig.4 Result of single-frequency orbit determination of the Tianxiang-1
除了单频定轨结果外,还采用L1/L2双频伪距和多普勒数据进行了定轨精度评估。天象一号卫星轨道为500 km,由于受到部分电离层的影响,因而采用双频实时定轨,其定轨精度将可以得到提高,其误差分布情况如图5所示。经统计,其收敛时间为1 h,三轴位置误差RMS值为0.837 9 m,速度误差RMS值为0.000 9 m/s。同单频相比,定轨精度提高到亚米级以内,同理论结果一致。

图5 天象一号卫星自主实时双频定轨结果Fig.5 Result of dual-frequency orbit determination of the Tianxiang-1
4 结束语
本文重点描述了低轨卫星自主实时定轨的过程以及硬件实现,并依托天象一号卫星平台开展了在轨飞行测试,并分别评估了基于GNSS的单频和双频的实时定轨结果。经过与事后精密单点定位结果进行比对,其单频定轨结果优于2 m,双频定轨结果优于1 m,且连续工作稳定可靠,充分证明利用自研的低轨星载GNSS接收机进行自主实时定轨是切实可行的。通过在低轨卫星中搭载自主实时定轨接收机可以达到亚米级定轨精度,这是在以通信和导航为主的低轨卫星上实现时空基准框架快速确定的一次创新。利用GNSS接收机实现自主实时定轨,减少了地面设施的支撑,将大大减少低轨卫星时空基准框架确定的复杂性和成本,为后续基于低轨通信和导航星座的导航增强实现提供了可行的技术手段。