带温控系统的10kN·m扭矩标准装置研究
2020-09-10梅红伟倪晋权
梅红伟 杨 进 倪晋权 李 涛
(1.北京航天计量测试技术研究所,北京,100076;2.北京空间机电研究所,北京 100094;3.上海船舶设备研究所,上海 200031)
1 引 言
随着现代化工业的发展,动力系统成为了新型装备的关键部件。在船舶领域的柴油机、蒸汽轮机、燃气轮机、电力推进系统,航空航天领域的涡扇发动机、液体或固体发动机、各类压气机等,都需要进行试验台架的扭矩测试,扭矩测量仪(简称扭矩仪)成了必不可少的测量设备[1]。扭矩仪一般分为磁电式、相位差式、电阻应变式、光纤应变式、声表面波式、薄模式、电容式等。除了在实验室里使用,扭矩仪在现场、原位等场合下的使用需求越来越迫切。动力系统的试验场所环境条件恶劣,使用温度范围可达(-90~200)℃。温度是影响材料物理特征的重要参数,温度变化时,材料的弹性模量、波动比等参数会产生相应变化,导致传感器的输出量值亦发生变化,从而造成测量误差。尤其是应变式扭矩传感器,温度变化不仅使其弹性轴的物理特性发生变化还会改变粘贴剂的固定能力和应变片本身的物理特征,最终都会对扭矩仪的测量结果产生影响。可见,开展传感器的温度特性研究对保证传感器在实际使用环境下的测量精度具有重要意义。
2 总体设计方案
在变温环境下,带温控系统的10kN·m扭矩标准装置主要由传统的10kN·m扭矩标准装置和温控箱组成,设计原理如图1所示。
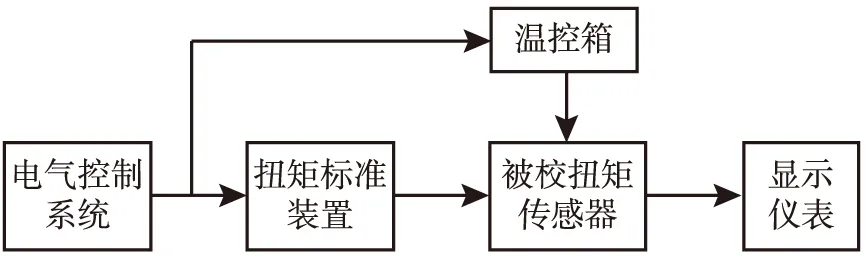
图1 带温度控制系统的扭矩标准装置原理图Fig.1 Schematic design of torque standard with temperature control system
3 10kN·m扭矩标准装置设计
10kN·m扭矩标准装置采用静重式原理,由标准砝码的重力和标准力臂臂长的乘积产生标准扭矩值[2]。扭矩标准装置产生的标准扭矩值按下式计算:
M=FLsinα
(1)
式中:M——扭矩校准装置产生的扭矩,N·m;F——砝码产生的重力,N;L——力臂长度,m;α——力臂与铅垂线的夹角,rad。
由上式可以看到,扭矩校准装置产生的扭矩是由砝码产生的力、力臂长度和力臂与铅垂线的夹角,经过运算获得。
根据静态砝码加载原理,即在长度一定的标准梁上加载标准砝码,由长度乘以重量,产生标准扭矩值,标准扭矩值对被校扭矩传感器的输出进行校准。按照力偶平衡原理,设置的平衡机构再将受力偏移角度的标准梁恢复到水平位置,完成标准的扭矩加载[3]。机构采用挠性联接组件有效地减小了不同轴度对扭矩测量的误差。所述各种机械机构均安装在刚度和强度足够的床身基座上。
10kN·m扭矩标准装置主要由标准力臂、悬挂组件、平衡力臂机构等组成。测量范围为(100~10000)N·m,分为1kN·m、2kN·m、5kN·m和10kN·m共4个量程,并且实现全自动计量校准工作,不倒砝码。
3.1 标准力臂设计
标准力臂是10kN·m扭矩标准装置中最关键的设备,也是产生标准扭矩的主要部分。标准力臂的设计主要包括力臂的支撑结构、力臂长度及结构形式的设计。
3.1.1支撑结构
10kN·m装置的支撑结构需要支撑力臂以及产生标准力砝码等的重量。且力臂产生的重量不产生力矩,这就要求标准力砝码之外的重力全落在标准力臂的对称铅垂线上。10kN·m装置力臂和产生扭矩的砝码质量大,常规的气浮支撑结构难以满足大载荷的要求,且价格昂贵。因此,仍采用常规的刀口支撑结构。
10kN·m装置的标准力臂的结构简图如图2所示。三个刀刃处在同一水平面内,设力臂臂长OA=OB=L,吊挂系统质量分别为P、Q,P=Q。横梁自重为R,重心位于C点,OC=hc。

图2 标准力臂结构简图Fig.2 Structural diagram of standard arm
当标准力臂工作于稳定平衡状态时
P·L=Q·L
(2)
在标准力臂A端增加质量Δm,则标准力臂横梁偏转θ角,C点偏转至C′点,此时标准力臂平衡力矩方程为
(P+Δm)L·cosθ=Q.L·cosθ+R·hc·sinθ
(3)
式中:R——横梁自重;hc——横梁重心C与刀刃O的距离。
而
PLcosθ=QLcosθ
(4)
代入上式
Δm·L·cosθ=R·hc·sinθ
(5)
(6)
式中:Δs——横梁偏转θ角后,边刀刃垂直方向的位移量;Δm——标准力臂A端增加的质量。
将上式两边均乘以L,则有:
(7)
由公式(7)可见,标准力臂稳定性与灵敏性为矛盾关系。一般标准力臂为保证稳定性常采用牺牲灵敏度、增加hc,再通过改进检测位移的方法来提高标准力臂的准确度。

依据随遇平衡原理设计的高准确度刀口支撑机构的灵敏度很高,其空载摩擦力矩大约只有2.0×10-5N·m。刀口支撑结构中刀子和刀承的接触理论上是一根线,但实际加工时难以做到,即便实际加工做到了,长期的使用也难以保证。因此,实际设计时为提高刀子刀承的承载能力。一般将刀子刀承设计成如图3所示结构。刀口支承由刀口、凹的圆柱形刀承配对组成。刀口的两侧表面经过磨削和抛光,尽可能的使刀口和刀承之间的接触面有良好的表面粗糙度,从而减小其互相之间滚动摩擦系数。
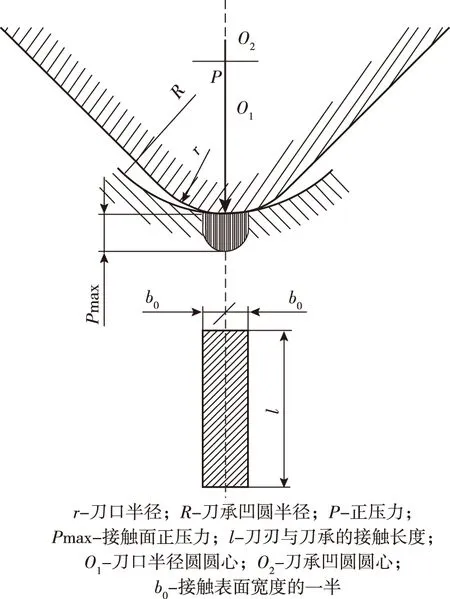
图3 刀口支承受压接触受力分析图Fig.3 Contact stress analysis diagram of knife edge support under pressure
在刀口支撑结构中,刀口的半径为r,它在凹圆柱、平支承或球面支承上做小幅度滚动。为提高系统准确度,需要设计具有最小摩擦阻力的刀口支撑结构,该支撑结构刀口两平面应相交,在满足支撑强度的前提下,刀刃的半径r角应尽可能的小。设计时,首先通过理论计算得出初步的设计参数,再依据试验数据不断地优化调整设计参数。
3.1.2力臂长度及结构形式
对于力臂长度的确定,由公式(1)可知,力臂长度越长灵敏度越高,但是加长力臂后,为确保标准力臂的刚度要求达到在砝码悬挂机构安装受力处不产生挠性形变,需要力臂有足够的强度,在选取的材料确定的情况下,只有靠加大力臂的尺寸保证挠性形变在允许的范围内,加大力臂尺寸也就意味着增加了力臂的质量,力臂质量的增加又反过来降低了力臂的灵敏度[4]。因此,设计中借助了三维设计软件结合以往经验将力臂长度设计为1250mm,考虑到力臂对装置不确定度的影响,确定力臂的设计长度为1250mm±0.05mm。通过三坐标测量机反复测量和修磨最终保证标准力臂机构的有效长度为1250mm±0.05mm。10kN·m扭矩标准装置支撑机构和输出轴装配结构如图4所示。
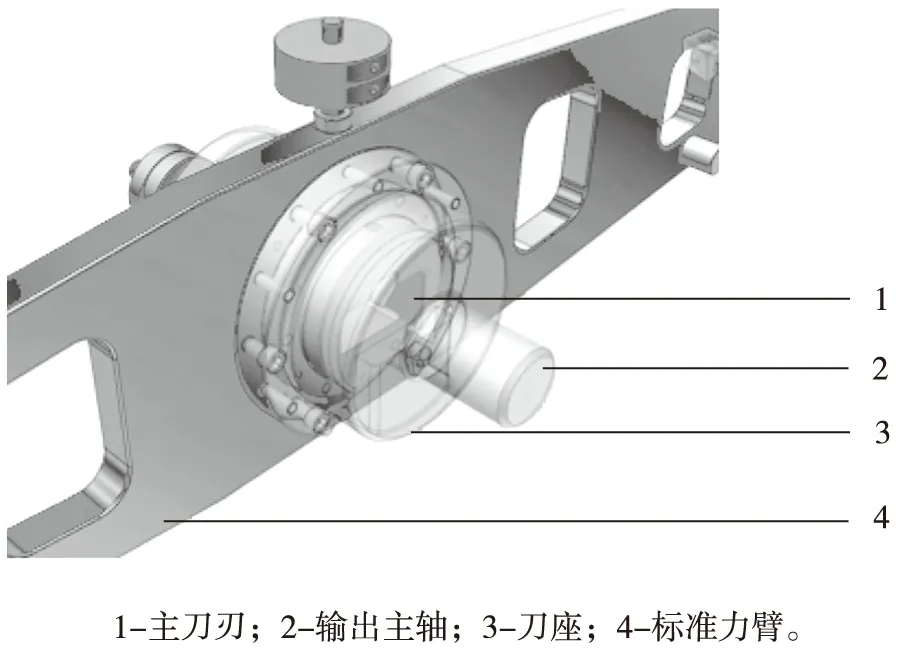
图4 主刀刃、输出主轴结构图Fig.4 Structure diagram of main cutting edge and output spindle
3.2 悬挂组件的设计
如图5所示,力臂两端安装边刀,有利于有效距离的准确计量,保证力臂的长度误差控制在允许范围内。另外,砝码加载在边刀上,需要边刀有足够的支撑强度,设计时需要保证标准砝码的加载方向在铅垂线上的同时要求吊挂结构中有两个相互正交方向的调节功能,确保砝码产生的重力在铅垂线上,通过悬挂结构的阻尼系统防止加载砝码时不停地晃动。
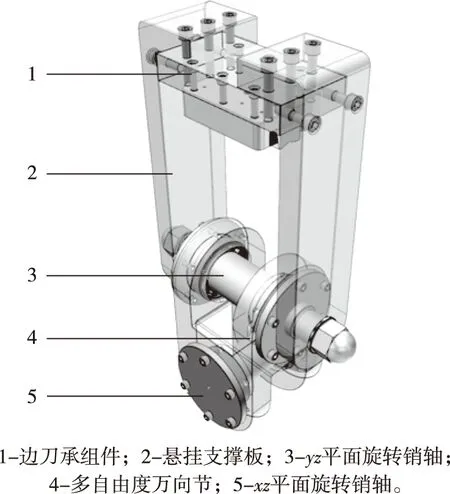
图5 吊挂结构示意图Fig.5 Schematic diagram of suspend structure
3.3 平衡力臂机构
平衡力臂机构是10kN·m扭矩标准装置的主要部件,当加卸载砝码时,被校扭矩传感器受扭后产生变形,使标准力臂偏离水平位置,为确保装置的准确度需要确保标准力臂在一定范围内偏离水平位置。采用激光位移传感器准确检测力臂的不水平度,并作为反馈信号,采用平衡力臂机构作为执行单元旋转被校扭矩传感器,在平衡力臂机构的作用下,确保标准力臂处于水平位置[5]。
10kN·m扭矩标准装置选用的平衡减速机型号为CHH6215TB-9251,其额定输出扭矩大于10kN·m,减速比为1∶9251。选择平衡电机三菱HF-SP52B系列,保持扭矩为2.39N·m;额定转速为2000r/min;转动惯量为6.1×10-4kg·m2。
4 温控系统设计
所用组合式变温试验系统是一种分体式环境温度测试设备,用于提供高温、低温或者变温的试验条件[6]。变温试验箱主要由试验箱体、制冷和加热控制系统、空气循环系统等功能模块组成,结构原理如图6所示。

图6 温控箱结构原理图Fig.6 Structure schematic diagram of temperature control box
组合式变温试验系统主要有两种控制方式,高温控制和低温控制。高温控制是通过导入热风加热箱体,制冷系统采用液氮制冷。变温试验系统可实现高温、低温、变温等状态,为扭矩传感器模拟现场的实际温度环境。
4.1 箱体结构
温控箱体主要起保温作用,根据传热方程Q=hAΔT,可知散热量Q与散热面积A成正比,因此箱体结构形状设计对试验箱能耗会造成较大影响。箱体外壁采用2.0mm,冷轧钢板;内壁1.5mm,SUS304不锈钢板;底板1.5mm,SUS304不锈钢板,底部承重加强。
保温材料采用高温硬质聚氨脂,附加超细玻璃纤维以避免高温状态对发泡层的影响,采用二次发泡专利技术,增强保温效果。为消除长期变形,用硬质聚氨酯(PU)发泡保温层,厚度120mm,配进口隔热板和阻燃剂。
4.2 控制系统
控制系统是高低温环境试验设备的核心,它决定了试验设备的升/降温变率以及误差等重要指标,关系到试验设备操作的方便性和运行的稳定性。本温控系统的主要技术途径是采用PID控制技术或模糊自适应PID控制技术。
4.3 制冷系统
本装置是一种以液氮为制冷剂的深低温设备,由低温箱、液氮罐、液氮分液环、液氮分配器、专用电磁、泄压阀以及控制系统构成。
基本原理为液氮由自增压液氮罐加压,通过低温电磁阀进入低温箱,液氮在低温箱内由液氮分配器和液氮分液环喷洒液氮快速降温,再通过循环风机充分汽化,在低温箱内产生低温。通过控制液氮蒸发量,控制低温箱温度,保证温度均匀度和稳定度达到设计要求,换热完成后的氮气由泄压阀排出。
降温速度控制原理是设定降温曲线即每点温度及保温时间来调整和控制降温速度。
温度控制由温控仪表通过PID调节自动控温。
4.4 加热系统
加热装置采用镍铬合金电热丝加热器,不同功率级联组合设计,灵活功率配比。加热控制采用PID自动调整,经无触点开关(SSR)输出至加热器;创造性提出加热因子设计,有效控制大功率加热器低加热功率输出,对于高温恒温和低温段斜率有较好的调整效果;采用高准确度热电阻和热电偶做为PID的反馈信号及时反馈给控制系统。
4.5 风循环系统
为保证均匀度指标要求,试验室设有内部循环送风系统及专用风道。工作室一端的风道夹层内,分布加热器、制冷蒸发器、风叶等装置。采用风机使箱内空气循环,当风机运行时,将工作室中空气从下部吸入风道内,经加热/制冷后从均匀地吹出,在工作室中与试品交换后的空气再被吸入风道内,反复循环,从而达到温度设定要求。试验箱循环风场如图7所示。
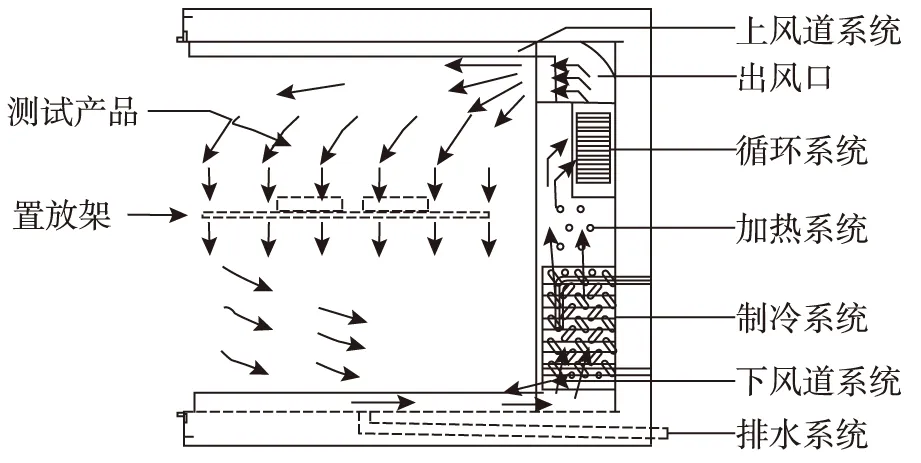
图7 试验箱循环风场Fig.7 Circulating air field of test chamber
5 标准装置测量不确定度评定
5.1 测量模型
由于温控系统只产生均匀的温度环境,箱体和扭矩输出轴之间无接触,不会对输出轴产生摩擦扭矩,因此,带温控系统的10kN·m扭矩标准装置的标准扭矩值为
M=FLsinα+Mf
(8)
式中:α——力臂与铅垂线的夹角,rad;Mf——力臂刀刃支撑的摩擦扭矩产生的扭矩附加值,N·m。
5.2 测量不确定度来源分析
由测量模型中可以看出,本装置不确定度的主要来源有砝码产生重力的不确定分量、力臂长度的不确定分量、力臂与铅垂线的夹角的不确定度分量和力臂刀刃支撑的摩擦扭矩的不确定分量。虽然温箱箱体不产生摩擦扭矩,但温箱通过输出轴传递的温度对各不确定度分量是有影响的,在分析不确定度来源时,每个不确定度分量中已考虑温度影响,因此可以认为各不确定度分量之间是不相关的。综上分析,测量不确定度分量来源如下:
(1)砝码重力产生的相对标准不确定度分量urel(F);
(2)力臂长度偏差产生相对标准不确定度分量urel(L);
(3)力臂与铅垂线的夹角产生的不确定度分量urel(α);
(4)力臂刀刃支撑的摩擦产生的相对标准不确定度分量urel(Mf);
(5)测量重复性引入的相对标准不确定度分量urel(R)。
5.3 测量不确定度评定
5.3.1 砝码重力引入相对标准不确定度分量urel(F)
(1)砝码质量偏差引入的相对标准不确定度分量urel(F1)

(9)
(2)地理位置引起重力加速度值偏差引入的相对标准不确定分量urel(F2)
北京丰台地区的重力加速度的精确值为9.80144m/s2,相对误差εg为±1.02×10-5。设区间内为均匀分布,则其引入的不确定度为
(10)
(3)温度变化对砝码重力影响引入的相对标准不确定度分量urel(F3)
砝码一方面受环境温度的影响,另一方面受输出轴传导温箱温度的影响,带温控系统的10kN·m扭矩标准装置实验室的温控波动小于±5℃,由于砝码受输出轴传导温箱温度的影响很小,可忽略不计。因此,砝码仍以受环境温度影响为主,导致空气密度和专用砝码密度变化,密度引入的相对误差εt为2.61×10-5,设区间内为均匀分布,则其引入的不确定度为
(11)
(4)砝码摆动对砝码产生重力影响引入的相对标准不确定度分量urel(F4)

(12)
(5)砝码产生重力引入的相对标准不确定度分量urel(F)
urel(F)=
(13)
urel(F)=1.86×10-5
5.3.2力臂长度引入不确定度分量urel(L)
(1)标准力臂横梁的设计长度与制造偏差引入的标准不确定度分量urel(L1)
标准力臂设计名义值为1250mm;设计完成后,通过准确计量确保力臂在1250mm±0.05mm范围内,则力臂长度的相对误差εL1为±4×10-5,设区间内为均匀分布,所以标准力臂横梁的设计长度与制造引入的标准不确定度分量为
(14)
(2)标准力臂长度因环境温度变化而引入的标准不确定度分量urel(L2)
标准力臂一方面受环境温度的影响,另一方面受输出轴传导温箱温度的影响,带温控系统的10kN·m扭矩标准装置实验室的温控波动小于±5℃,由于输出轴采取了隔热措施,输出轴传导的温箱的影响很小,可忽略不计。因此,标准力臂仍受环境温度影响为主。力臂采用40Cr合金钢,其系数α为11.7×10-6/℃,因此,温度变化对力臂长度的影响小于±0.073mm,则温度变化引起力臂长度的相对变化εL2为±5.8×10-5,若区间内为均匀分布,温度变化引起主力臂长度变化所引入的相对标准不确定度分量为
(15)
(3)标准力臂满载时挠度变形和力臂水平位置偏差引入的标准不确定度分量urel(L3)
标准力臂满载后最大挠度引起力臂下降量由激光位移传感器测量为0.145mm,根据误差三角形计算,力臂下降引起水平方向的长度变化相对误差εL3为6.7×10-9,设区间内为均匀分布,则其引入的不确定度为
(16)
(4)标准力臂主刀刃接触母线与输出轴的不同轴度引入的标准不确定度分量urel(L4)
为了降低温箱温度对装置的影响,在输出轴和被校扭矩传感器之间增加了隔热材料,不同轴误差值为±0.2mm,则不同轴相对误差εL4为±3.2×10-4,设区间内为均匀分布,则其引入的不确定度为
(17)
(5)力臂长度偏差产生不确定度分量
urel(L)=
(18)
urel(L)=1.93×10-4
5.3.3 力臂与铅垂线的夹角产生的不确定度分量urel(α)
利用电子水平仪测量力臂的水平度后确定激光位移传感器的零点值,力臂与铅垂线的夹角受水平仪测量的水平度和激光位移传感器的分辨力决定,电子水平仪的水平度可控制在±0.02mm/m以内,而激光位移传感器的准确度优于0.002mm,因此,力臂与铅垂线的夹角相对误差εα为±2×10-5,设区间内为均匀分布,则其引入的不确定度为
(19)
5.3.4 力臂刀刃支撑的摩擦引入的不确定分量urel(Mf)
(1)最大负载扭矩时刀刃支撑的摩擦扭矩所引入的相对标准不确定度分量urel(Mf1)
最大负载扭矩时的刀刃支撑灵敏度实测值为82g,即摩擦扭矩的值为1N·m。标准装置的最大负载为10kN·m,摩擦扭矩引入扭矩相对误差εM1为±1×10-4,设区间内为均匀分布,则其引入的不确定度为
(20)
(2)最小负载扭矩时刀刃支撑的摩擦扭矩所引入的相对标准不确定度分量urel(Mf2)
最大负载扭矩时的刀刃支撑灵敏度实测值为0.82g,即摩擦扭矩的值为0.01N·m。标准装置的最大负载为100N·m,摩擦扭矩引入扭矩相对误差εM2为±1×10-4,设区间内为均匀分布,则其引入的不确定度为
(21)
因此,力臂刀刃支撑的摩擦引入的不确定分量为
urel(Mf)=5.77×10-5
5.3.5测量重复性引入的相对标准不确定度urel(R)
利用德国HBM公司T12HP型高准确度扭矩测量仪在(100~10000)Nm范围内10次重复测量的S(x)最大值不超过0.02%。因此,测量重复性引入的相对标准不确定度urel(R)为
(22)
5.4 合成标准不确定度
各不确定分量之间不相关,因此,合成标准不确定度为
uc(M)=
(23)
uc(M)=2×10-4
5.5 扩展不确定度
取k=2,则装置的扩展不确定为
Urel=kuc(M)
(24)
Urel=4×10-4
5.6 试验验证
利用德国HBM公司T12HP型高准确度扭矩测量仪分别在上海船舶设备研究所扭矩标准装置和10kN·m扭矩标准装置上分别测量1kN·m、10kN·m和10000N·m三个典型点,测量结果见表1所示。

表1 上海船舶设备研究所和本装置测量结果Tab.1 Measuremeat result of Shanghai Marine Equipment Research Institute and this device测量点(N·m)上海船舶设备研究所测量值y1(N·m)上海船舶设备研究所测量结果的不确定度U1(k=2)本装置测量结果y2(N·m)本装置测量结果的不确定度U2(k=2)y1-y2U21+U22100100.010.05100.060.050.710001000.040.051000.520.050.7100009999.80.0510003.80.050.6
6 结束语
该项目研究,可以应用到其它除应变外的扭矩传感器的校准检定工作中,不仅能够反映其真实温度特性,还可以对有特殊要求的传感器进行额外的温度补偿,提高扭矩传感器的测量准确性。
