基于车载的轨道扣件同步采集系统设计及实现
2020-09-04彭乐乐钟倩文郑树彬
李 鑫,彭乐乐,钟倩文,郑树彬
(上海工程技术大学城市轨道交通学院,上海 201620)
线阵相机是轨道视觉检测系统中获取轨道扣件信息的重要技术手段,受车辆运行变速和振动影响,线阵相机拍摄的轨道扣件图像会出现拉伸、压缩和失真等现象[1-4]。因此,如何在车辆行驶时获得清晰完整的轨道扣件图像,是实现轨道视觉检测的关键环节之一[5-7]。
目前,轨道扣件检测系统研究在智能算法方面已经非常成熟了,但轨道扣件信息获取技术还不够完善[8-9]。现有的轨道扣件信息获取是通过单片机读取编码器脉冲信号并输出脉冲信号触发控制线阵相机工作拍摄图像;利用脉冲计数同步获取惯性单元传感器信息[10-12]。然而,该类采集轨道信息方法受车辆运行时发生打滑和空转影响,导致拍摄的轨道扣件图像出现拉伸和压缩现象;且在高速状态中,产生脉冲计数不准确和采样频率过高等问题,导致采集的惯性信息数据出现偏差及重复等问题[13-14],这进一步影响到采集轨道扣件信息的精度。
为了实现变速下轨道扣件信息的同步获取,本文设计了一种基于车载的轨道扣件同步采集系统。基于车载速度脉冲建立了线阵相机等距触发控制关系和传感器同步采集模型,利用FPGA实现车载速度脉冲信号倍频变换及各传感器同步触发控制。实验表明,该轨道扣件同步采集系统能够稳定触发采集各传感器信息,采集到的轨道扣件图像不失真变形。
1 系统设计结构及原理
图1给出了基于车载的轨道扣件同步采集系统结构。该结构主要由2台线阵CCD相机、陀螺仪、加速度计和倾角仪组成的惯性单元、FPGA和工控机组成。为了获取高清晰的轨道扣件图像,实现轨道扣件图像及相机惯性信息同步采集,利用车载速度脉冲信号建立速度测量及补偿模型,通过车载脉冲频率得到车辆瞬时速度和行驶距离;建立等间距变换关系得出车载速度脉冲频率与线阵相机等距拍摄轨道扣件图像的线扫描速率对应关系,从而实现线阵相机等间距触发控制;通过建立传感器同步触发模型来实现传感器信息同步采集。选择合适的线阵相机,利用FPGA实现线阵相机的等距触发控制和传感器信号的同步采集,从而得到符合检测要求的轨道扣件图像,实现轨道扣件的同步采集。
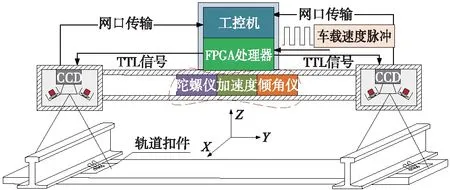
图1 轨道扣件检测系统结构
2 基于车载速度脉冲与距离的变换关系及模型
2.1 基于车载速度脉冲的测速及补偿模型
基于车载速度脉冲建立测速和速度补偿模型,建立车载速度脉冲信号频率数据与车辆行驶速度数据的相互关系,从而通过测量的车载速度脉冲频率得到车辆行驶速度;通过补偿模型对速度进行补偿处理,使测量得到的速度趋近车辆实际速度;得到精准的车辆行驶距离。
2.1.1 速度模型
该轨道扣件同步采集系统获取车载速度脉冲信号得到速度与脉冲信号之间的对应关系;车载速度脉冲通过车载上安装的光电式速度传感器产生的,其频率大小随车辆运行速度变化而变化。两者关系为
(1)
式中,Vo为车辆运行速度;R为车辆车轮半径;m为光电式速度传感器内部光栅数;fm为光电式速度传感器输出信号的频率值。通过测量车载速度脉冲的频率信号便可获知车辆的速度大小。
2.1.2 速度补偿模型
车载光电式速度传感器受车辆在运行过程中发生空转和打滑影响,导致测量计算的速度与车辆实际速度存在较大误差,需对其进行补偿处理。这里提出了一种基于光电速度传感器输出的前n个时刻的脉冲信号频率值来修正最新时刻脉冲频率值的方法,建立速度补偿模型,得出补偿后车辆速度与车载速度脉冲频率之间的关系。通过计算前n个脉冲信号频率的平均值作为最新时刻脉冲信号的频率值,来计算车辆速度。
如图2所示,通过前n个脉冲信号的频率值实时补偿修正光电速度传感器输出最新时刻的脉冲频率值,然后以补偿后的脉冲频率值作为输入,建立速度补偿模型,得到车辆运行速度和车载速度脉冲频率值间的关系
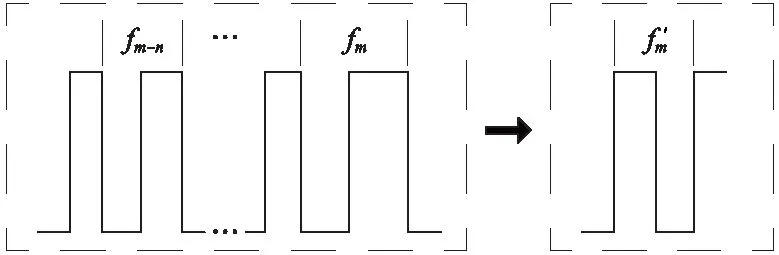
图2 脉冲脉宽变化示意

(3)
式中,Lo为补偿处理计算得到的车辆行驶距离;fm为实时车载速度脉冲的频率。通过式(3),可知车载速度脉冲频率对应周期内车辆行驶的距离。
2.2 等距变换关系
该轨道扣件同步采集系统通过2台线阵相机获取左右2条轨道的扣件图像信息,线阵相机每次只扫描一条线,通过连续扫描后拼接形成二维图像。通过建立等距变换关系,得出车载速度脉冲频率与线阵相机等距拍摄轨道扣件图像的线扫描速率对应关系,从而实现线阵相机等间距拍摄轨道扣件图像的触发。根据线阵相机拍摄的轨道扣件图像不出现拉伸和压缩现象要求,需要保证图像的横向和纵向分辨率相同。线阵相机拍摄轨道扣件图像时,其横向分辨率由线阵相机自身的像素和拍摄目标物轨道扣件的宽幅决定,纵向分辨率由车辆行驶距离和线扫描速率决定。其横向分辨率为
(4)
其中,Lc为线阵相机拍摄的轨道扣件图像宽幅,Hc为线阵相机的每线像素数。纵向分辨率为
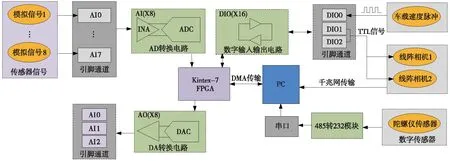
图3 FPGA控制框图
其中,Lo为车载速度脉冲对应的车辆行驶距离;Vo为线阵相机线扫描速率;Tm为车载脉冲信号周期。由式(3)、式(4)和式(5)可得到线阵相机等间距拍摄轨道扣件图像的线扫描速率与车载速度脉冲之间的关系为
(6)
利用式(6)的变换关系,实现线阵相机等距拍摄轨道扣件图像控制。
2.3 传感器同步触发采集模型
该轨道扣件同步采集系统通过陀螺仪、加速度计和倾角仪来获取系统运行的角速度、加速度和角度等惯性信息。系统在运行过程中,其角速度、加速度和角度等惯性信息在一定距离内是相同的,并不需要线阵相机线扫描速率那么高的采用频率采集传感器信息。通过设定车辆每运行l距离采集一次传感器信息,得到该同步采集系统的惯性信息同步采集频率和车载速度脉冲频率之间的关系。由式(3)可知车辆运行距离与车载速度脉冲信号频率的关系,在距离l确定的条件下,通过倍频变化得到传感器同步触发采集频率和车载速度脉冲频率之间的变换关系。
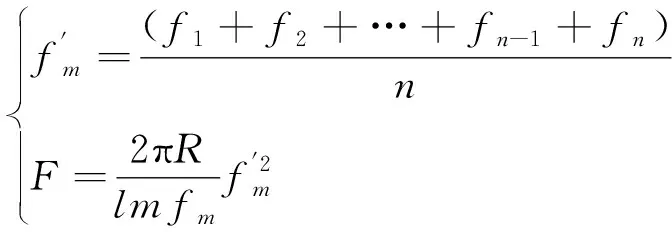
(7)
其中,F为传感器同步触发采集频率;l为设定的采集距离。通过式(7)实现系统每运行l距离时同步触发控制采集传感器信息。
3 基于FPGA实现线阵相机等距触发和传感器同步采集控制
如图3所示,该轨道扣件同步采集系统采用Kintex-7 FPGA系列芯片作为中央处理芯片,利用FPGA硬件并行优势,使系统在每个时钟周期内同时完成多个处理任务[15]。FPGA芯片实时控制数字输入输出电路读取车载速度脉冲信号的频率,根据测速与补偿模型和等距变换关系计算得到相机等距拍摄的线扫描频率,然后通过定时翻转产生相应频率的脉冲信号触发线阵相机工作[16-18]。该系统通过串口获取陀螺仪信号,FPGA芯片通过DMA传输方式从PC端获取串口接收的陀螺仪传感器产生的数字信号,然后经DAC电路将数字信号转换为模拟信号输出;输出的模拟信号同加速度计和倾角仪等模拟传感器产生的模拟信号经ADC电路传输给FPGA芯片,然后FPGA芯片根据传感器同步触发采集模型计算得出的同步采集频率对多个通道的模拟信号进行同步采样采集[19-20];最后将采集到的信息传输至上位机。
该轨道扣件同步采集系统程序控制部分主要用于完成PC端数字信号的采集与发送、车载速度脉冲信息的获取、倍频计算及脉冲信号输出和多通道模拟信号的采集及上传等动作。本设计采用NI LabVIEW软件进行FPGA编程,完成系统功能开发。系统上电后芯片的主程序首先进行初始化,然后系统实时从PC端获取采集到的陀螺仪数据然后将其发送;系统通过识别脉冲信号的上升沿时间间隔判定脉冲的频率并进行倍频变化输出,用于线阵相机触发和传感器信号的同步采集,最后将采集到的传感器数据上传给上位机。程序流程如图4所示。

图6 各传感器数据
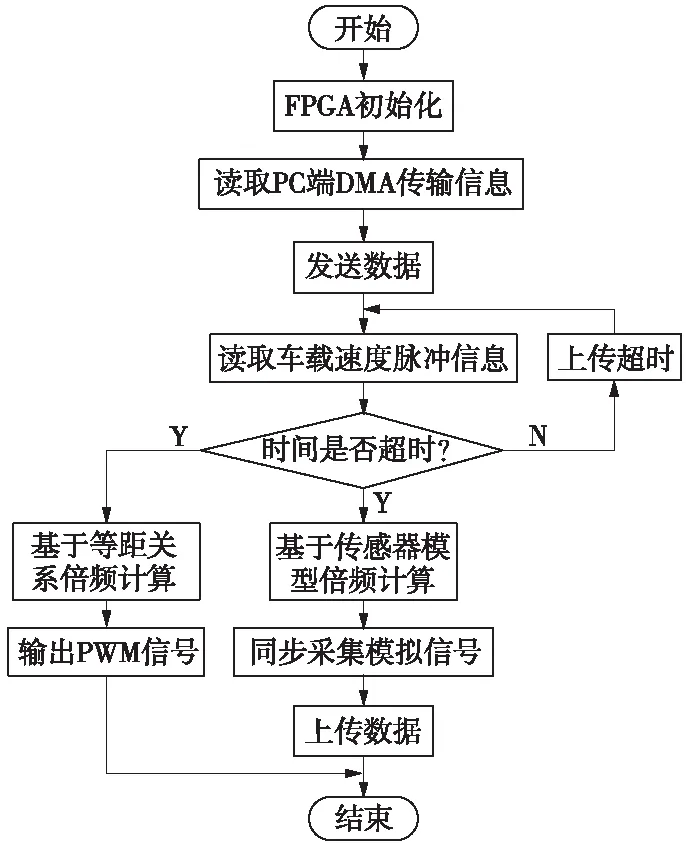
图4 软件主程序流程
4 实验验证
为了验证本文所设计系统的效果,搭建了轨道检测小车测试平台(图5),该轨道检测小车上安装有线阵相机、惯性传感器、光电编码器和NI采集设备,其中线阵相机安装在小车前方。推动小车在轨道上以不同速度来回运动,并在变速的过程中增加急加速和急减速来产生空转和打滑等状态;连续运行1 000 m测试采集系统的性能。
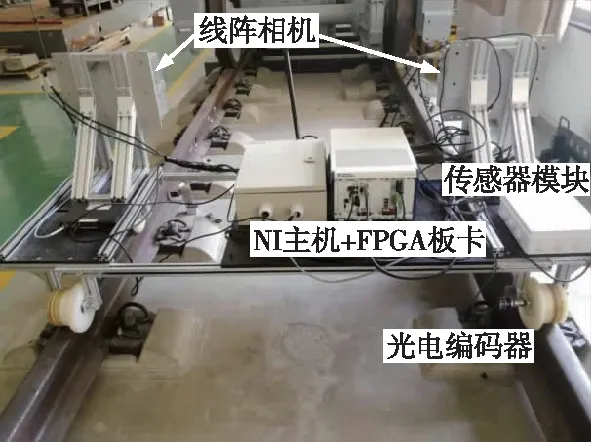
图5 轨道检测小车测试平台
表1给出了选用线阵相机的关键参数,保证线阵相机拍摄的轨道扣件图像满足铁路检测要求为0.5 mm的精度要求。表2给出了惯性传感器各传感器具体型号。

表1 线阵相机关键参数

表2 各惯性传感器型号
图6给出了实验过程中同步采集的各传感器数据,系统通过设置传感器同步采集模型参数l的值为1 m,实验总共测试距离为1 000 m,系统准确的同步采集到1 000组传感器数据。图6中传感器信息能够反映线阵相机工作时的振动情况,可用于扣件图像补偿处理。
图7为图像采集上位机软件,线阵相机通过千兆网线和主机系统连接,上位机软件通过识别、配置和控制两个线阵相机完成轨道扣件图像采集存储和显示。该系统能够随速度变化根据等距触发模型实时触发线阵相机工作,等距拍摄的扣件图像效果较好,如图8所示。图8(a)、图8(b)、图8(c)三图为基于车载脉冲等距触发采集的方法在实验过程中不同速度下获取的轨道扣件图像,图片信息完整清晰,未出现失真现象;系统能够完成变速下图像的准确采集。
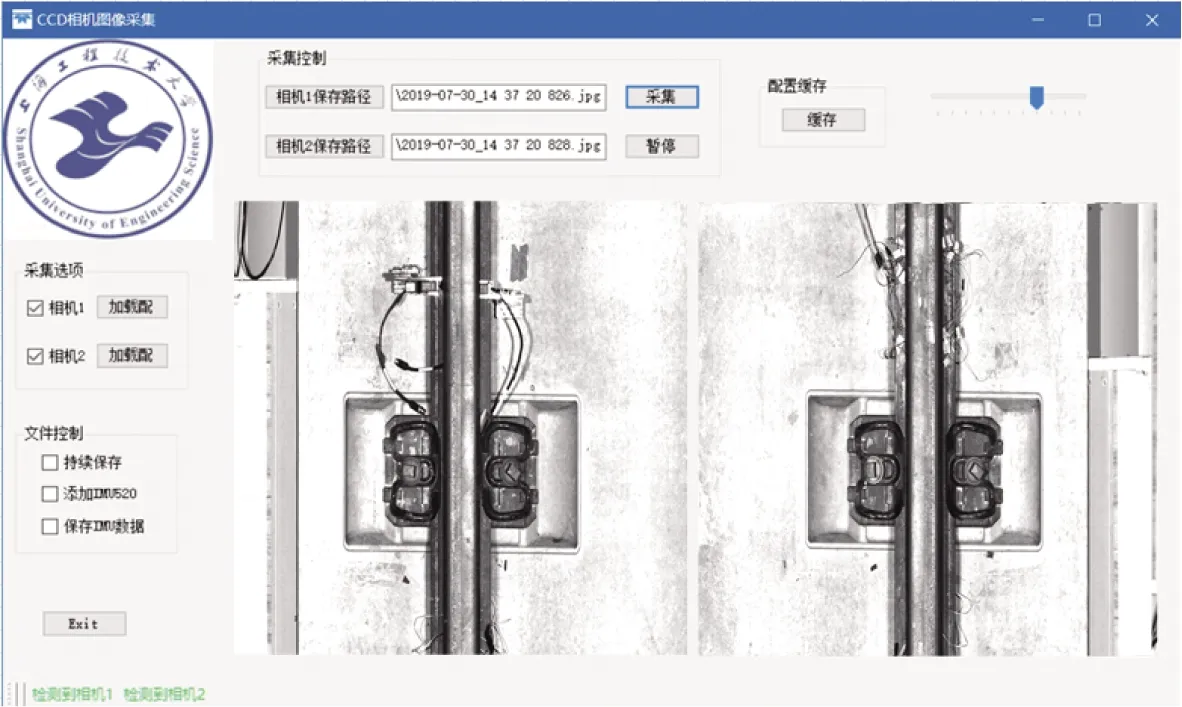
图7 扣件采集软件界面
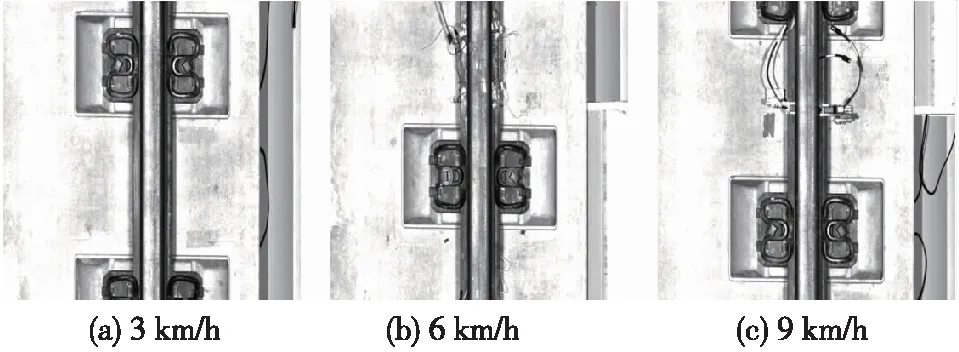
图8 不同速度下采集的扣件图像
图9为基于常规光电编码器直接触发采集方法获取的轨道扣件图像;因变速运行过程中发生空转、打滑等状况,导致采集的图像在轨道扣件区域出现了较为明显的失真现象。
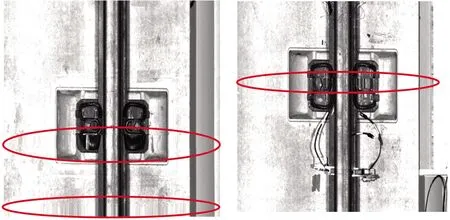
图9 轨道失真图像
通过图8、图9对比可知,相比常规光电编码器直接触发采集的方式,本文基于车载脉冲等距触发采集的方法,可以解决变速中产生空转和打滑等状况导致采集的轨道扣件图像失真问题。
5 结语
针对线阵相机拍摄轨道扣件时受变速和振动的影响导致拍摄的轨道扣件图像失真问题,本文设计了一种基于车载的轨道扣件同步采集系统。通过搭建轨道检测小车进行轨道信息采集实验测试本系统性能,结果表明:该系统能够根据建立的等距关系和同步采集模型,实现线阵相机的等距拍照和传感器信息的同步采集,且获取的图像不失真。
