弹性高超声速飞行器反步滑模控制器设计*
2020-09-01凡永华
张 进,冯 昊,凡永华
(1 西北工业大学航天学院, 西安 710072; 2 上海航天控制技术研究所, 上海 201109)
0 引言
高超声速飞行器能够以不小于5Ma的速度在大气层内机动飞行,因而具有极高的军事应用潜力。高超声速技术融合航空、航天领域的技术优势,能够极大带动总体、气动、结构、控制等学科的发展[1-2]。目前,随着美国HAWC、HSSW等高超声速飞行器工程项目的提出,表明吸气式高超声速技术正朝着武器化、实用化方向发展[3-4]。
高超声速飞行器因为飞行环境复杂和自身结构特点影响,存在显著的参数不确定和伺服弹性问题。如果不采取恰当的控制设计方法,轻则影响飞行器控制系统品质,引起飞行器振颤,重则影响飞行器飞行安全,造成飞行器失控、损毁。对于该问题,国内外众多学者进行了相关研究,并取得了一系列研究成果。文献[5]研究了低频弹性模态与刚体耦合对于飞行控制系统设计的影响。在控制系统设计中,将弹性模态影响作为不确定性考虑到刚体的运动控制中去,设计了基于H和μ方法的姿态控制器。文献[6]考虑了气动推进/气动弹性的飞行控制系统其不确定性的来源较为特殊,主要是气动加热导致的热应力和结构弹性模量随温度的变化,这样的变化会引起飞行器的结构动力学特性发生改变。文献[7]考虑了高速飞行器线性时变动力学系统的不确定性建模问题。其不确定性主要分为两类:非结构的不确定性模型和实参数的结构不确定性模型。对于模型不确定度的估计表明,根据刚体模型预测的低频动力学的不确定度明显大于根据弹性模型所获得的不确定度,说明对于弹性高速飞行器的控制系统设计而言,刚体飞行器的假设显然不能够满足要求。文献[8]考虑飞行器纵向静不稳定性与伺服弹性问题,设计了双回路鲁棒控制器。内环设计变增益控制器,将弹性模型表示成具有仿射参数依赖结构的LPV模型,外环设计鲁棒控制器,实现飞行器对攻角指令的精确跟踪,控制器能够主动对结构模态进行阻尼,达到抑制伺服弹性的效果。
文中针对弹性高超声速飞行器在具有参数不确定性情况下的控制问题,结合反步法和弹性自适应滑模控制方法进行控制律的设计。最后通过对某型高超声速飞行器的数学仿真,验证了设计控制器的有效性。
1 高超声速飞行器控制问题描述
1.1 高超声速飞行器动力学模型
高超声速飞行器刚体纵向动力学模型为:
(1)
式中:V表示飞行器速度;θ表示飞行器弹道倾角;h表示飞行器高度;ωz为俯仰角速度;α表示攻角;m为飞行器质量;P、X、Y、Mz分别为飞行器的推力、阻力、升力和俯仰力矩。
类比弹性梁的受载振动情况建立高超声速飞行器纵向平面运动的弹性振动模型。
(2)
式中:W(x,t)是沿弹体分布的横向载荷密度;y(x,t)表示弹体弹性振动,是沿弹体弹性坐标系ox轴的幅值时变函数;m(x)是弹体质量分布函数。以各阶固有振型为基坐标,用固有振型线性表达式表示弹体弹性振动函数:
(3)
式中:ηi(t)为第i阶振型对应的广义坐标。利用固有振型的正交化进行化简求解,得到弹性高超声速飞行器振动的常微分方程:
(4)
式中:ωi为固有频率;ζi为第i阶弹性模态的阻尼比;Ni为第i阶弹性模态的广义力。联立式(1)和式(4)即可得到高超声速飞行器刚体-弹性耦合模型,其中弹性振动方程中只考虑一阶弹性模态。
文中研究对象为巡航飞行的高超声速飞行器,推力可认为是常量,升力、阻力、俯仰力矩和第一阶弹性模态的广义力可表示为:
(5)
式中:Sref、Lref分别为飞行器参考面积和参考长度;q为飞行器动压,表达式为q=ρV2/2;δz为飞行器升降舵偏角;CY、CX、CMz、CN1分别为各力和力矩系数,拟合方程为:
(6)
1.2 高超声速飞行器参数不确定问题
高超声速飞行器飞行环境复杂,飞行过程中,飞行器的结构参数和气动参数等均会产生明显的摄动,表达式为:
(7)
式中:m0、Sref0、Lref0、Jz0为结构参数的基准值;CY、CX、CMz、CN1为气动参数的基准值;Δm、ΔSref、ΔLref、ΔJz、ΔCY、ΔCX、ΔCMz、ΔCN1为其不确定性。
考虑飞行器结构参数和气动参数摄动,可得简化的面向控制的弹性高超声速飞行器纵向动力学模型为:
(8)
(9)
式中:Δα、Δωz为上述近似以及气动参数变化、结构参数变化引起的建模误差,它们是攻角、俯仰角速度和升降舵偏角的非线性函数。
若分别记:
x1=α,x2=ωz,u=δz,Δ1=Δα,Δ2=Δωz
则简化的弹性高超声速飞行器纵向动力学模型可表示为如下的一般形式:
(10)
式中:Δ1是非匹配不确定部分;Δ2是匹配不确定部分。综合考虑自适应滑模控制和反演控制在处理不确定系统时的优点,可以将两种控制方法结合起来,设计弹性高超声速飞行器控制律。
2 控制器设计
2.1 反演自适应滑模控制器设计
假设式(10)表示的系统中的匹配和非匹配不确定项都满足不确定量有界条件:
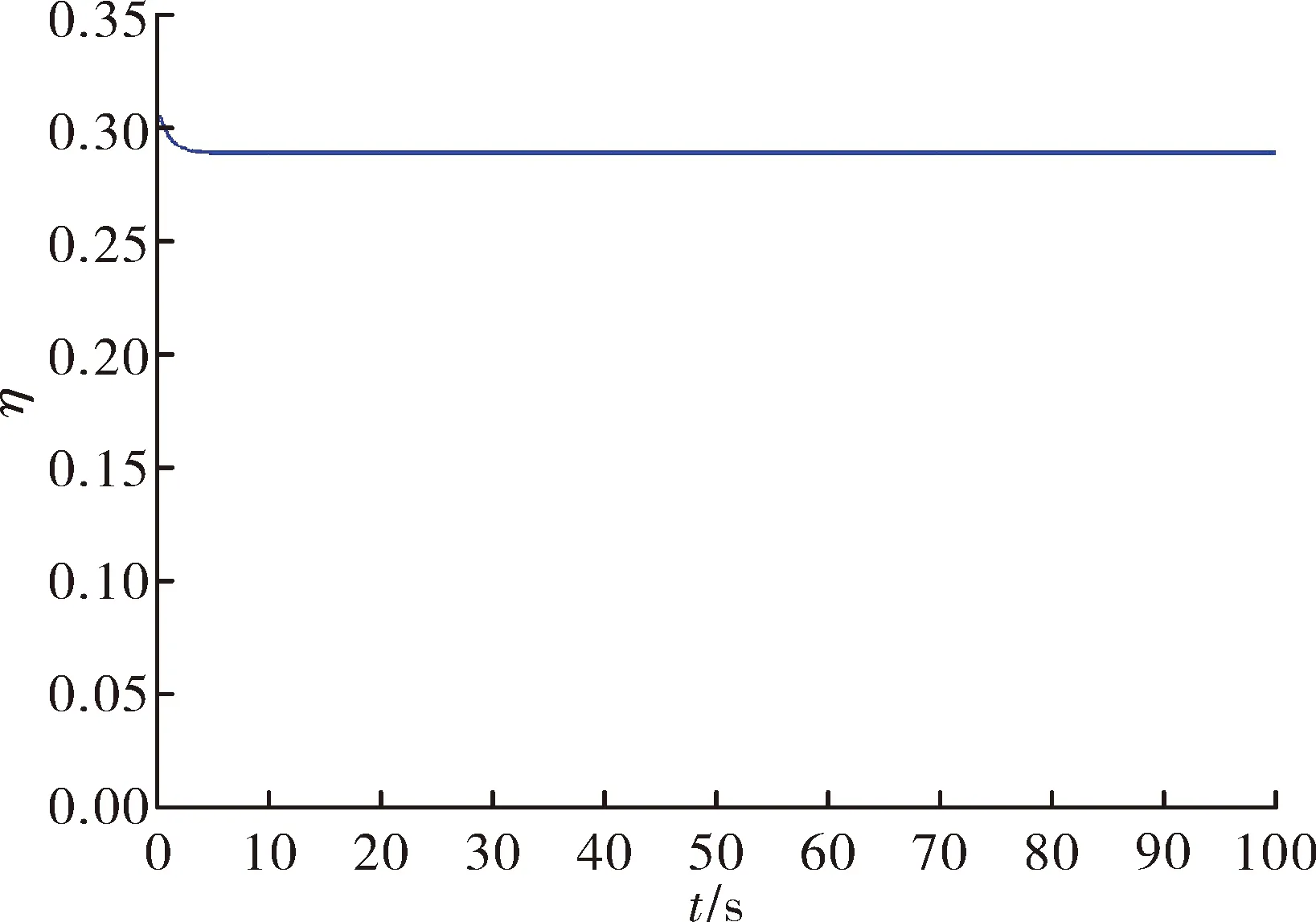
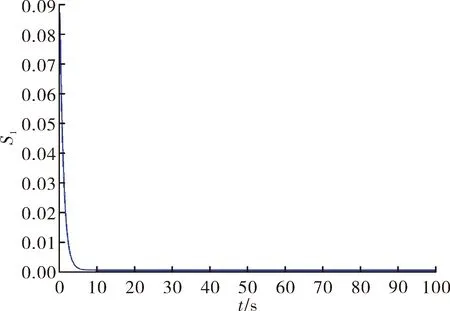
|Δ1| 式中:E1、E2是未知的正常数。 设攻角指令为x1d,需要设计跟踪控制器使得x1→x1d。 第一步,为第一个状态变量x1定义一个滑模面,如下所示: S1=x1-x1d (11) 根据式(10),对第一个滑模面S1求导: (12) 将x2作为虚拟控制量x2d,选取满足滑动模态可达条件的参数自适应调节的指数趋近律,使得: x2d=-f1(x1)-g1(η)-k1S1-E1sgn(S1) (13) (14) 虚拟控制量x2d可调整为: (15) 式中:k1>0,r1>0为常数。 令x2=x2d,将式(15)代入式(12),可得: (16) 第二步,设计控制器以消除虚拟控制量x2d与状态量x2之间的偏差。对第二个状态量x2定义滑模面,以实现x2对虚拟控制量x2d的跟踪: S2=x2-x2d (17) 根据式(12)、式(15)以及x2=S2+x2d,第一个滑模面的滑模运动方程(式(16))应改写为如下形式: (18) 同理,对滑模面S2求导可得: (19) 同样选取满足滑动模态可达条件的指数趋近律,且飞行器飞行过程中有b≠0,可得设计的控制量u表达式如下: (20) 式中:k2>0,r2>0为常数。 (21) 将控制量u的表达式式(20)代入式(19)可得滑模运动方程: (22) 经过以上步骤即完成了弹性高超声速飞行器纵向非匹配不确定系统的反演自适应滑模控制律设计:对于系统(10)设计式(15)、式(20)带自适应项的滑模控制器,以使系统(10)的状态稳定且能够满足控制要求,即x1→x1d。 选用的李雅普诺夫函数为: (23) 由定义可知V>0,对其进行求导可得: (24) 由式(24)可得: (25) 为了降低抖振,采用饱和函数代替符号函数可得: 其中:φ为边界层厚度。 假设弹性高超声速飞行器定高巡航飞行,令H0=25 000 m,V0=1 800 m/s。其他状态量初始条件设定为:初始弹道倾角θ0=0°,初始攻角α0=5°,初始俯仰角速度ωz0=0°/s,攻角的期望值αd=0°,仿真时间设定为100 s。控制器参数设置分别为:k1=20,k2=5,r1=0.2,r2=0.1,φ=0.1。 在上述仿真条件下,利用文中设计的反演自适应滑模控制方法,进行弹性高超声速飞行器巡航飞行仿真实验,仿真结果如图1~图6所示。 图1 飞行器攻角变化曲线 图2 飞行器俯仰角速度变化曲线 图3 飞行器升降舵偏变化曲线 图4 飞行器弹性状态变化曲线 图5 攻角滑模面变化曲线 图6 俯仰角速度滑模面变化曲线 从仿真结果图1中可以看出,所设计的控制器能够实现非匹配不确定下弹性高超声速飞行器攻角的稳定有效跟踪。图2是俯仰角速度的响应曲线,可以看到俯仰角速度能够快速达到动态稳定。图3是飞行器控制量变化曲线,在仿真初始时刻,舵面的偏转幅度较大,是由于气动弹性模态引起的振动较大,需要利用舵面的偏转有效抑制弹性的影响。从图4中也可以看出弹性模态在初始时刻有较大变化,随后弹性振动趋于平稳,而升降舵偏转也趋于平稳。图5和图6是设计的两个滑模面的变化曲线,可以看出攻角滑模面与俯仰角速度滑模面均可在有限时间内收敛到0。 针对弹性高超声速飞行器的参数不确定性问题,文中设计了一种反演自适应滑模控制器,并证明了系统全局渐近稳定。通过仿真证明了设计的控制器,能够较好地跟踪攻角指令且有效地抑制弹性及不确定的影响。



2.2 稳定性证明



3 仿真验证
3.1 仿真条件及参数设置
3.2 仿真结果分析




4 结论
