全方位移动平台发展现状综述
2020-08-31闫猛飞
闫猛飞


摘要:全方位移动平台机动灵活的特性适合工作在空间狭小、对场地利用率要求高的场合。本文围绕全方位移动平台,从行动机构、关键技术、存在问题、应用现状等几个方面进行了研究讨论,最后展望了其发展趋势。
Abstract: The mobility and flexibility of the omni-directional mobile platform is suitable for working in situations where the space is narrow and the site utilization rate is high. In this paper, the omni-directional mobile platform is discussed from the aspects of action mechanism, key technology, existing problems, application status, etc. Finally, the development trend is prospected.
关键词:全方位移动平台;麦克纳姆轮;全方位履带
Key words: omni-directional mobile platform;mcnamara wheel;omni-directional crawler
中图分类号:TH113.22 文献标识码:A 文章編号:1006-4311(2020)24-0252-06
0 引言
全方位移动平台(Omni-directional mobile platform),能够任意方向进行移动的平台,在二维平面内具有3个自由度,无需任何转向机构,便能够在二维平面内进行前后(纵向)、左右(横向)、斜行、零半径转向等运动形式[1]。全方位移动平台的出现,解决了传统车辆转弯半径大、空间利用率低、工作效率不高的弊端[2],给需要高性能机动能力、在狭窄空间作业的任务带来了希望。利用全方位移动平台独特的运动特性,搭载不同的功能模块,比如机械臂、升降机构等,可将全方位运动性能广泛应用于生产生活中的各个领域,提高效率,节省空间,降低成本。
1 行动机构研究
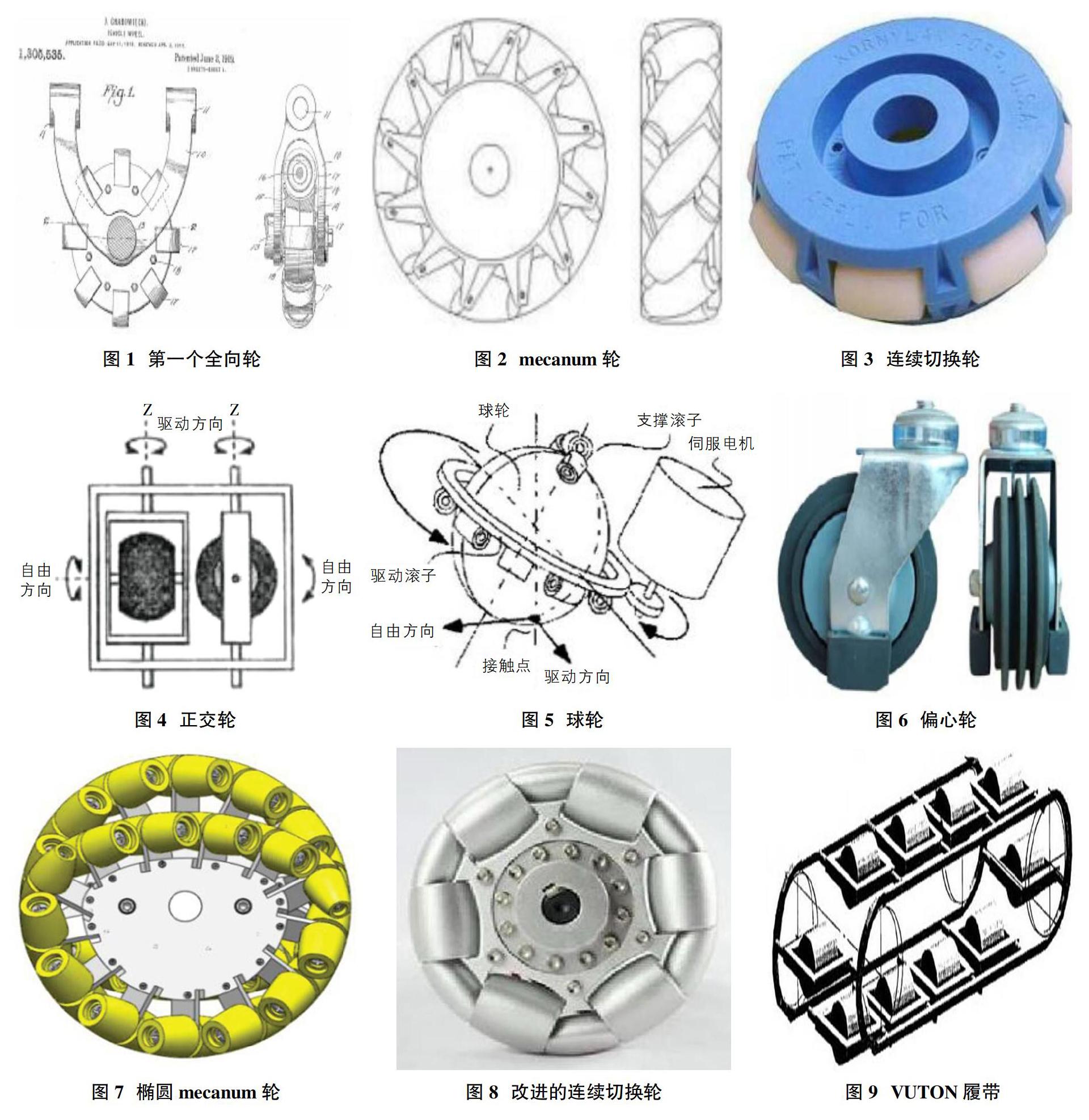
全方位移动平台独特的运动方式,关键的一点在于全向行动机构的应用。典型的全向行动机构有:麦克纳姆轮、连续切换轮、正交轮、球轮、偏心轮、全方位履带等。行动机构对平台的布局形式有决定作用,不同的行动机构通过特定的布局才能使平台实现全方位运动,比如正三角形、十字交叉形、矩形等等。
1919年,美国J. Grabowiecki申请了第一个全向轮的专利(图1),这一点并不广为人知[3]。该总成由一个主轮和横向滚轮组成,就像大多数机器人世界杯球队使用的那种。早在1907年,发明家们就在考虑设计一种不需要方向盘就能向前或横向移动的车辆。
麦克纳姆轮[4]是1973年瑞典工程师Ilon设计发明的(图2),通过在轮毂外围均匀排列一圈特殊形状的辊轮,所有辊轮的外包络线形成一个圆形,辊轮轴线与轮毂轴线成一定角度,通常为45度,从而达到将轮子转动时产生的径向力转换至辊轮的轴向力,利用多个(通常为4个)轮子的组合驱动达到平台全向移动的效果。第一台利用麦克纳姆轮设计的全方位移动平台是1985年卡内基梅隆大学研发的Uranus机器人[5]。严格意义上说,基于麦克纳姆轮的全向移动平台真正开始实现了全方位移动的目的,在需要高频次变换位姿的场景,无需任何转向机构,只需要通过4个轮子的转速及转向的配合便能够到达任意位置。
1974年,Blumrich发明了连续切换轮[6],并投入生产(图3)。连续切换轮延续了麦克纳姆轮在轮毂外圈加装自由滚子的思路,不同的是连续切换轮轮毂轴心与滚子轴心相互垂直,当轮子转动时受力方向与轮子前进方向一致,驱动效率较麦克纳姆轮有所改善。连续切换轮的缺点在于其轮廓曲线是多边形,导致轮子转动时与地面为点接触,会产生抖振现象,尤其是转动速度较快时,振动尤为强烈[7]。
1980 年,Bradbury 发明了正交轮(图4)并取得其专利。正交轮结构主要由两个相同大小并切去球冠的,且轴心相互垂直的球型轮子构成。运动过程中,两个球行轮交替与地面接触,因此受地面摩擦力变化较大,导致正交轮的速度以及平台整体的运动精度都受到不同程度的影响,因此正交轮的应用范围受到很大局限性。
球轮[8]主要由滚动球体、驱动滚子、支撑滚子构成(图5)。来自伺服电机的驱动力带动驱动滚子,进而通过摩擦力带动滚动球体转动,以此使球轮运动。通常利用4个球轮可以实现全方位运动。但球轮运动时,驱动球轮前进的力是来自地面的摩擦力,受载荷及路面条件的不确定性影响很大,所以球轮的应用场景很受限制。
偏心轮(图6)即所谓的万向轮,也称脚轮,按照驱动方式分为主动脚轮,被动脚轮。我们常见的旅行箱、医疗急救床等用的都是被动脚轮。Woojin Chung 等设计了一款双偏置主动脚轮(有图),每个轮子用两个直流无刷电机控制,分别控制转向和驱动。主动脚轮的优点在于行驶平稳,路况适应性好,不会像麦克纳姆轮一样产生振动;缺点是需要协调控制转向电机和驱动电机,导致控制难度增大;在做非连续曲线运动时,需要停下来调整轮子偏转角度,在需要高频次变换平台位姿的任务场景中显然效率低下;在正常行驶时转向机构会成为额外负载,降低能量利用效率[9]。
自从发现全向运动的优势之后,研究人员从未停止对全向轮系的研究以及改进。Olaf Diegel等为避免由两端支撑滚子的麦克纳姆轮在倾斜或不平整路面上轮毂外缘与地面接触进而导致运动不良的情况,将其改为中间支撑滚子结构;为了改善轮子的受力情况进而提高平台整体的效率,设计了可锁定的滚子以及可旋转的滚子两种轮子结构[10]。Remirez-Serrano等为了提高平台越障性能,提出了一种改进的椭圆形双轮麦克纳姆轮结构(图7),实验证明平台横向运动时能克服高达车轮75%的障碍[11]。
Gfrerrer[12]和贾官帅[13]对麦克纳姆轮滚子母线进行研究,分别利用画法几何和解析几何得出了相同的母线参数表达方程。杨铭对比分析了椭圆弧、圆弧、等速螺旋线的理论母线近似效果[14],最终得出圆弧是近似效果最佳的平面曲线的结论。张学玲在受力分析的基础上,通过仿真计算研究麦克纳姆轮滚子受载变形后导致的运行不平稳的问题,提出对滚子的外轮廓进行合理的补偿设计[15]。
文献[16][17]提到了一种改进的连续切换轮(图8),利用两种大小不同的辊子交替排布,这两种滚子都可以自由转动,所有滚子外圈的投影是一个封闭的圆。由于这种改进的连续切换轮在转动时同地面是连续接触的,因此避免了抖振现象的发生。
哈尔滨工业大学机器人研究所闫国荣等设计了一种新型全方位轮式移动机构[18],其结构类似于双排连续切换轮,通过两层轮毂外缘的滚子交错排布,达到轮子与地面连续接触的目的,从而减轻了轮子的抖振;并且轮子主动转动与滚轮从动运动相互独立,减小了运动时的功率损失。
在全方位轮系发展的基础上,有学者结合传统履带机构进行适当改进,使之应用于全向平台的行动装置。
1992年,日本西川等人设计了一种球轮履带,利用两条履带的差速驱动带动球轮的从动运动从而实现所设计机构的全方位运动。
1993年,日本Shigeo Hirose等人借鉴transwheel轮的设计思路设计出VUTON履带[19],履带结构由一对链条和若干滚轮构成,滚轮轴线与驱动轮轴线夹角为90度,其特点是与地面接触面积大,可以承受高强度负载,但对路面适应性较差,难以通过台阶等障碍(图9)。
2001年,美国Nitin Chhabra 等人设计出一款混合履带[20],履带上的滚轮互相对称,成人字形布置,通过控制每条履带的转速及转向,对力矩进行矢量合成,达到各个方向移动的目的(图10)。混合履带的好处是,与同等尺寸和规格的轮式车辆相比增大了接地面积,减小了对地面的压强,越障和通过性能更好。
2002年,Peng Chen等人利用与VUTON履带相同的原理设计出全方位自由轮履带[21],实现了全方位运动的同时提高了平台的越障能力。
国内,2012年,湖南农大李旭等人申请了一项全方位履带专利[22],在履带两侧安装有用橡胶做的可自由转动的行走轮,行走轮的中心轴线与履带中心轴线夹角为0~90度。虽然该履带具备了全方位运动的基本条件,但李旭等人在专利中所描述的平台并不具备严格意义上的全方位移动的性能,平台横向移动时必然伴随着转动(图11)。
装甲兵工程学院张豫南等人发明了一款全方位移动履带[23],并申请了专利。该履带与传统履带形式非常相似,具有主动轮、负重轮、诱导轮、拖带轮等机构,不同的是履带板表面加装有带偏置角的滚轮,滚轮偏置角通常为正负45度。其优点在于将传统履带机构行走优势与全方位运动优势相结合,提高了全方位运动稳定性、运动精度以及路面适应能力(图12)。
2 关键技术
全方位移动平台是一个可扩展的应用平台,涉及多种领域研究,包括运动控制、导航定位、传感器信息融合等。
2.1 运动控制
全方位移动平台能够进行横移、斜行、中心转向及以上运动的复合运动等特殊运动方式,需要协调控制各个行走机构的转向及转速。传统的机械传动及液压传动等方式无法实现如此复杂的运动方式。所以目前大多数全向平台采用分布式电控的方式,即一个行走机构对应一个(无需调整轮子偏向角)或两个(需要调整轮子偏向角)驱动电机。其控制算法往往根据平台运动学或动力学模型进行确定。对于典型的三轮组结构和四轮组结构来说,其运动学及动力学模型是不相同的,因此其相应的控制算法也不尽相同。在一些对运动控制精度有要求的场合,往往还需结合PID控制、模糊控制、自适应控制、滑模控制、神经网络控制等其中一种或几种经典的控制算法。
2.2 导航系统
导航系统使全方位移动平台能够实现自主移动,是其向智能化发展的第一步。导航系统需要完成三项工作:①定位,确定自己在哪儿;②确定自己要去哪儿;③路径规划,即如何去或怎么去。目前常用的导航定位技术有视觉导航定位、超声波导航定位、GPS定位、光反射导航定位等,当前主流的机器人定位技术是SLAM(即时定位与地图构建)技术。精确的导航定位系统能够使全方位移动平台更精准可靠地实现自主移动。
2.3 传感器信息融合
传感器之于全向移动平台就像眼、耳、鼻、喉之于人。全方位移动平台要自主实现精确导航、定位、控制或者其他更多的决策处理行动,依赖于内部及外部多种传感器获取的数据信息。对多种传感器信息的融合处理能够降低环境、噪声等干扰造成的不确定性,提高系统的容错能力。
3 发展现状
目前,科研工作者已经研发出了各式各样的全方位移动平台,其应用涉及医疗康复、休闲娱乐、科研教育、工业生产、轨道交通、仓储物流、电力、航空航天、国防军工等多个领域。
虽然可以实现全方位运动的行动机构多种多样,但是当前应用最广泛、商业化最成功的是基于麦克纳姆轮的全方位移动平台。正如很多科学技术一经发现便被用于军事用途一样,上世纪80年代,美国海军便购买了麦克纳姆轮的专利,开展军事领域应用研究。直至1996年,美国AIRTRAX公司开始将全方位运动技术在民用领域推广应用。最初,AIRTRAX公司将全方位运动技术应用于叉车领域,由于其独特的移动方式迅速给这一行业带来了新的活力。COBRA TM 是Airtrax公司研制的全向移动剪刀式升降机,是该公司将全向移动平台和升降机有机结合的另一个创新产品,给高空作业带来了极大的方便。受當时条件的限制,初期的全方位移动平台功能比较单一,只有简单的运动、控制等。此后,德国、日本、韩国、中国等国家众多科研机构和院校相继加入了对全向移动平台相关技术的研发,加快了全向移动平台的发展速度。
德国库卡公司生产研发的KMP omnimove[24]重载移动平台是全方位移动重载领域里的翘楚(图13)。内部搭载激光扫描仪用于环境监控,结合内置软件和先进的控制系统可实现精准的自主导航和移动;高功率蓄电池和应用工业无线技术的自给式电源使其不受任何连接的限制;光学方向控制、定位辅助和机械导向元件使得KMP omnimove能够实现最大1mm的定位精度,攻克了重载情况下难以精确调整的难题。利用无线遥控技术可方便的进行操纵。作为移动式平台,其大小、宽度与长度均可根据需要进行调整;两个KMP omnimove进行机械耦合可承载重达90吨或最长30米的货物,能够在狭窄的空间灵活的变换位姿,可同时保证机动灵活与工业安全性能。出于教育与共同研发的目的,库卡公司将其设计的youbot移动机器人技术开放共享。这是一个利用全方位平台搭载一个五自由度机械臂和一个二指加持器的小型机器人,专门用于研发和教育。
我国对全方位移动平台相关产品的研发投入较晚,但从目前市场情况来看有后来者居上的态势。成都航发、广州普华灵动、苏州欧米麦克、武汉汉迪、东莞松灵、上海汇聚自动化等机器人科技有限公司都有自己相应的成熟产品,服务范围包括轨道交通、航空航天、风力发电、物流仓储、金属加工等。
成都航发公司生产的OmniTitan重型全向运输车[25],能够满足单车500t以内的负载需求,特别适合大尺寸、大吨位的工件运输,能够在沥青、自流平、混凝土、硬土地面上运行,路面适应能力极强,具有自顶升及多车联动功能,对于一些特殊工件的搬运,能够解决行吊无法完成的难题。目前,其产品主要面向风电设备制造、列车总装,飞机总装等(图14)。
广州普华灵动公司生产的单驱单向潜入式AGV小车[26],其高度只有150mm,相当于一个普通手机的高度,号称AGV中的潜水艇(图15),在某些对高度要求较高的场合中便能够发挥它的作用。目前该产品已广泛用于汽配厂、电子厂、服装厂等物流需求企业。
上海汇聚公司生产的OMV飞机引擎安装设备[27],配备有高精度直线滑轨、高精度水平滑轨、独立四点高精度丝杠以及数字化控制电脑屏,适用于飞机制造业各部件的高精密装配,在国际上具有领先地位(图16)。
北京首都机场应用智能全方位移动停车机器人[28],实现了1分钟存车2分钟取车的惊人效率,不仅省去了汽车寻找车位过程中的燃油浪费,还降低了对停车场基建的要求,减少了灯光和通风设备等产生的能源开支。该机器人体积小,载重大,续航长时间,内部的感应装置能够使其自行躲避障碍物,避免车辆剐蹭。据了解该机器人将用于新建的大兴机场,继续发挥其出色的性能。
在轨道交通方面,北京卫星制造厂自主研发了一款列车车体转运平台,利用两台设备联动控制的形式解决了车体尺寸长、重量大造成的转运效率低的难题,很大程度上节省了装配空间, 提高了装配效率(图17)。其研制的全向移动自动焊接机器人[29]是我国首台实现工程化应用的、具有自主知识产权的产品。
在仓储物流领域,装甲兵工程学院联合浙江美科斯叉车有限公司研制了全方位移动叉车[30],填补了国产叉车在该领域中的空白。中科院沈阳自动化研究所研制的全向AGV[31]应用于自动立体仓库的运输,能够集中调度、实时监管,实现了整体的柔性控制。
在国防军工领域,利用全方位移动平台搭载升降设备和调姿机构可进行飞机弹体及外挂物的快速装配和拆卸,有效提高部队战斗力[32]。
在生活服务领域,全方位地面移动清扫机器人[33]可以在家庭和办公室等场所进行清扫作业,方便人们的居家和办公生活;全向智能垃圾桶[34]利用WiFi通信与用户手机进行连接,实现自主移动收集垃圾。
在医疗救护领域,全方位移动轮椅(图18)能够解决老年人及残障人士行动不便的困扰,全方位伤员转运机器人[35]可应用于医院或家庭伤员转运,能够在传染病房代替医护人员执行相关工作,结合机器人手臂和传送带技术可减少伤员疼痛。
在休闲娱乐领域,利用网红手表进行手势感应控制的全方位移动玩具车适合各个年龄段的人玩,能够有效缓解工作生活带来的压力(图19)。
在一些特殊危险工况条件下,利用全方位移动平台搭载相关功能设备可有效降低安全隐患,如配电变压器检测[36]。
全方位移动平台经过这么多年的发展,正以其出色的运动能力、更加完善的产品功能以及越来越先进的智能化水平,逐步被人们应用到生产生活的各个方面,提高人们的工作效率以及生产生活水平。
4 存在問题
4.1 全方位运动对地面条件要求较高,比较苛刻 无论何种行驶机构,全方位移动平台是通过每个全向轮力矩的矢量合成实现任意方向移动的,其良好实现的基础是各个全向轮协调配合。在平坦、干净、整洁的路面上,全方位运动效果越好;当地面条件较差时,比如凹凸不平、有砂砾、有水等,会导致其中一个或者几个轮子与地面接触不良或是摩擦系数改变,出现打滑现象,从而无法提供指定输出转矩或者部分输出指定转矩,导致合力矩大小或者方向改变,进而使运动轨迹偏移,运动性能降低,特别是在某些需要精确定位的任务场景中,地面条件的好坏决定了全方位运动性能的发挥。
4.2 全方位移动平台对自身结构设计要求更高 随着全方位技术的不断发展,在重载领域的需求将会越来越大,平台的整体布局设计应该更加紧凑,默认呈现对称几何特性,整体重心分布尽可能位于其几何中心位置;负重载荷尽量均匀布置,以使所有行动轮负载相同,受力状态一致,进而达到协调运动的目的。
4.3 行走机构对材料耐磨性要求越来越高 在重载工况下由于车轮承受压力变大,且制动功率相应变大,对车轮的磨损越来越严重,导致平台运行时行驶状态不“连续”,全方位运动性能降低。轮系材料磨损性能的提高将使全方位技术适应更加恶劣的工作环境,进一步扩大全方位移动平台的应用领域。
5 发展趋势
全方位移动平台已经在多领域体现出其不可替代的价值,随着时代的发展以及技术手段的进步,未来全方位移动平台主要呈现出以下发展趋势:
5.1 应用场景进一步扩大 全方位移动平台是一个可扩展的应用平台,自产生以来,不断结合最新的技术手段,来拓展自身功能,扩大应用场景,满足市场需求。目前,全方位移动平台应用场景主要是工厂、仓库、医院、超市、地下停车场等具有结构化路面的室内环境,还未能充分发挥其潜力优势;未来,随着新的执行功能系统的附加以及全方位移动履带等新的可适应非结构化路面的行走机构的成熟应用,全方位移动平台将会出现在更多的任务场景中,满足人们的生产生活需求。
5.2 更强的信息获取及决策处理能力 当前,全方位平台已能够通过激光、雷达、红外、超声波、图像等传感器实现环境感知、路径规划、自主导航、避障等活动,随着计算机技术及传感器技术的进步,基于多传感器信息的融合及决策处理将是全方位平台发展的新趋势。
5.3 智能化程度进一步提高 当前是一个智能化的时代,大数据、物联网、5G、云计算、人工智能等智能技术的相互融合推动着我们这个时代由万物互联迈向万物智能。未来全方位“智能”移动平台将会在生产生活中发挥越来越重要的作用。
6 结束语
本文对全方位移动平台做了一个全面的阐述,对几种典型的全向行动装置的结构及优缺点进行了归纳总结,简要概述了其关键技术,指出了当前存在的问题,介绍了全方位移动平台的应用现状,最后设想了其未来的发展趋势。随着科技的不断进步,我们有理由相信全方位平台的功能将会更加趋于完善,未来我上们将会在越来越多的应用场景中看到各种各样的集成全方位驱动技术的产品。
参考文献:
[1]刘勇.狭小空间内的全向移动平台关键技术研究[D].江苏科技大学,2016.
[2]吕永健,丛新勇,杨铭.步进电动机驱动的Mecanum轮全向装备运输车的设计[J].微特电机,2013,41(12):14-16,30.
[3]Rojas R. A short history of omnidirectional wheels [J]. IEEE Transactions on Robotics and Automations, 1996, 12 (1):69-72.
[4]陆军军. 基于Mecanum轮的集装箱底板打孔平台研制[D].南京林业大学,2015.
[5]Gregg Podnar. The URANUS Mobile Robot[J]. Autonomous Mobile Robots Annual Report, 1985.
[6]杨源鑫.轮式全向移动物流平台的运动学建模与轨迹跟踪控制[D].北京印刷学院,2017.
[7]赵冬斌,易建强,邓旭玥.全方位移动机器人结构和运动分析[J].机器人,2003(05):394-398.
[8]West M, Asada H. Design and control of ball wheel omnidirectional ehicles[C]// IEEE International Conference on Robotics & Automation. IEEE, 1995.
[9]Chung W, Moon C B, Jung C, et al. Design of the Dual Offset Active Caster Wheel for Holonomic Omni-directional Mobile Robots[J]. International Journal of Advanced Robotic Systems, 2011, 7(4):101-106.
[10]Olaf Diegel, Aparna Badve, Glen Bright, et al. Tlale, Improved Mecanum Wheel Design for Omni-directional Robots[C]// 2002.
[11]Ramirez-Serrano A, Kuzyk R. Modified Mecanum Wheels for Traversing Rough Terrains[C]// Sixth International Conference on Autonomic & Autonomous Systems. IEEE, 2010.
[12]Gfrerrer A. Geometry and kinematics of the Mecanum wheel[J]. Computer Aided Geometric Design, 2008, 25(9):784-791.
[13]賈官帅.基于Mecanum轮全方位移动平台的理论和应用研究[D].浙江大学,2012.
[14]杨铭,吕永健,丛新勇.Mecanum轮几何结构与辊子母线近似方法[J].机械设计与研究,2014,30(05):76-79,83.
[15]张学玲,侍才洪,康少华,胡军中.Mecanum万向轮滚子外轮廓曲面变形补偿设计[J].中国工程机械学报,2014,12(03):213-217.
[16]Paromtchik I E , Asama H . A motion generation approach for an omnidirectional vehicle[C]// IEEE International Conference on Robotics & Automation. IEEE, 2002.
[17]Kyung-seok Byun, Sung-jae Kim, Jae-bok Song. Design of continuous alternate wheels for omnidirectional mobile robots[J]. 2001.
[18]闫国荣,张海兵.一种新型轮式全方位移动机构[J].哈尔滨工业大学学报,2001(06):854-857.
[19]Hirose S, Amano S. The Vuton: High Payload, High Efficiency Holonomic Omni-Directional Vehicle[C]. Proceedings of 6th International Symposium on Robotics Research. IFRR, 1993: 253-260.
[20]CHHABRA NITIN (US), WILKINSON STUART (US). Hybrid track for a vehicle[P]. :US6179073,2001-1-30.
[21]Chen P, Koyama S, Mitsutake S, et al. Automatic running planning for omni-directional robot using genetic programming[C]// IEEE International Symposium on Intelligent Control. IEEE, 2002.
[22]李旭,谢方平,刘大为,黄利,叶强,袁開放. 一种全方向移动履带[P].CN102756764A,2012-10-31.
[23]张豫南,黄涛,颜南明,张健,尚颖辉,李年裕,李瀚飞,蔡志远,王双双,田鹏,闫永宝,赵玉慧,孙晓雨,吴中坚,李辉,张舒阳,王恒.全方位移动履带[P].CN103043128A,2013-04-17.
[24]http://c.gongkong.com/kukachina02/p95664.html.
[25]http://www.hangfa.com/omnititan/omnititan.html.
[26]http://www.sinorobot.co/displayproduct.html?id=2681648986047888.
[27]http://www.hictrl.com.cn/hangkongzhizhaoomv/omv2.shtml.
[28]https://www.jiqirentv.com/car-parking-robot.html.
[29]国内首台实现工程化应用的全向移动自动焊接机器人亮相2015世界机器人大会[J].金属加工(热加工),2015(24):1.
[30]https://www.chinaforklift.com/news/detail/200910/25366.html.
[31]AGVS产品及其应用[J].机器人技术与应用,1999(04):13-15.
[32]朱治国.基于全向智能移动平台的挂弹车设计[J].数字化用户,2013(31):73-74.
[33]高学山,徐殿国,王炎,周大威.全方位地面移动清扫机器人[J].机械工程学报,2008(03):228-233.
[34]吴剑英,平雪良,张逸伦,陈祥,马博琳,刘家威.全向轮智能垃圾桶设计[J].现代制造技术与装备,2019(01):47-48.
[35]李洪振,侍才洪,李瑞欣,张西正.一种伤员换乘转运机器人的研究设计[C].天津市生物医学工程学会、天津市第三中心医院.天津市生物医学工程学会第三十四届学术年会论文集.2014:89.
[36]朱孟周,周志成,曾强,等.基于全向智能移动平台的配电变压器柔性检测系统设计[C]// 中国电机工程学会高电压专业委员会学术年会.2015.