某型飞机航弹CCRP 投弹精度分析
2020-08-17熊宏锦
胡 钢,熊宏锦
(海装驻南昌地区军事代表室,江西 南昌,330024)
0 引 言
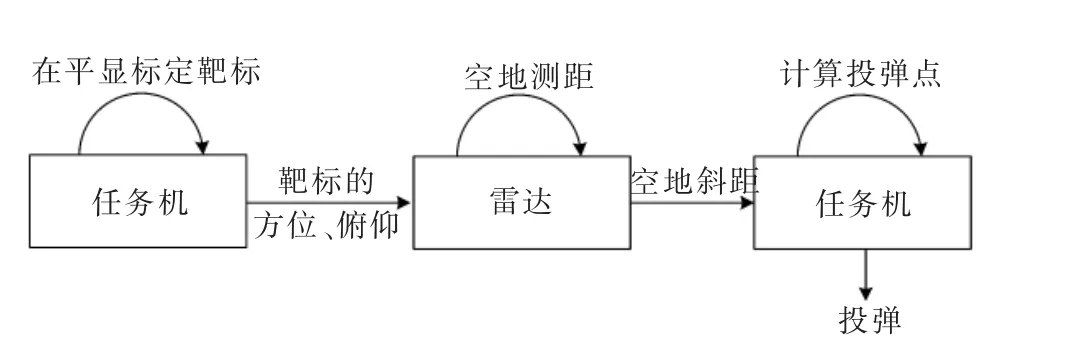
图1 使用雷达的CCRP 数据流
某型飞机由于加装机载火控雷达,故在鉴定试飞中要求武器系统结合雷达进行功能验证,开展了航箭、250-3 航弹CCIP 攻击方式鉴定试飞,以及500-3航弹的CCRP 攻击方式鉴定试飞。其中航箭、250-3航弹CCIP 攻击方式精度均满足要求。500-3 航弹的CCRP 攻击方式共投放两枚,航弹均正常投放,但投放偏差分别为430m 和475m,不满足最大偏差115m的精度要求,通过修正,最终满足精度要求。
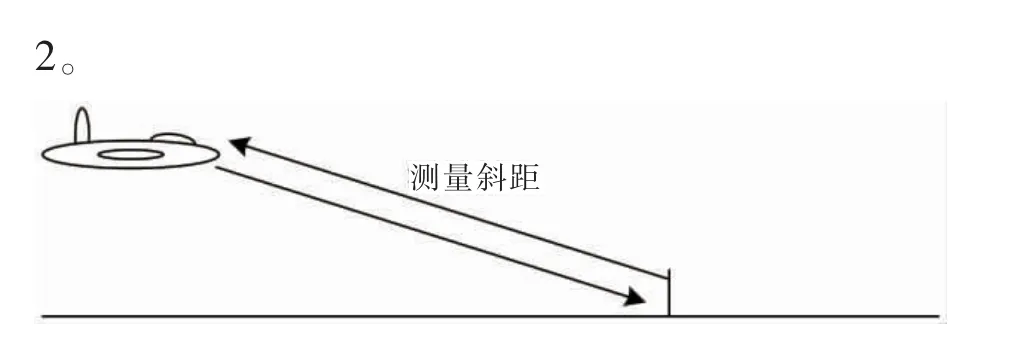
图2 雷达空地测距
1 航弹CCRP 投弹原理
CCRP(连续计算投放点)是一种普通武器空地投放方式。本次考核是火控系统使用雷达AGR 测距值作为解算参数,考核CCRP 投放功能,数据流见图1。
1)飞行员在平视显示器(HUD)上通过游标标定目标位置,任务机将目标指向角送雷达;
2)雷达根据任务机计算的靶标俯仰、方位角将天线指向靶标,并进行AGR 测距,测距示意图见图
3)雷达将测距值反馈任务机,任务机根据AGR测距值和速度、姿态等其它传感器参数,解算出飞机待投时间和待投距离在HUD 上显示,飞行员操纵飞机飞到任务机解算的投放点,按压投放按钮,炸弹即掉落。
2 数据分析
影响500-3 航弹CCRP 靶试精度的因素主要有:
1)平显及雷达的安装误差;
2)平显显示精度误差;
3)弹道误差;
4)惯导/大气机等机载传感器的误差;
5)雷达AGR 测距误差。
在靶试过程中,一般通过调整火控参数修正上述综合误差,以提高靶试精度。
进行500-3 航弹CCRP 靶试后,投放偏差分别为456m 和316m,不满足要求。经分析记录数据和视频,发现雷达AGR 测距存在一定偏差,鉴于该型机250-3 航弹CCIP、90-1 航箭CCIP 靶试精度较高,表明平显及雷达的安装误差、平显显示精度误差、弹道误差、惯导/大气机等机载传感器的误差较小。经分析认为调整火控参数可修正包含雷达AGR 测距偏差在内的系统综合误差,故对火控参数进行修正,火控修参理论分析如图3。
图3 中,O 为载机标定时刻位置,A 为弹着点,B为靶标,OA 为雷达AGR 测距,OB 为根据载机GPS和靶标GPS 解算的理论斜距,OC 为GPS 高度,∠α为雷达天线指向角修正量,∠α=∠OBC-∠OAC。∠OBC=arcsin(OC/OB),∠OAC=雷达天线俯仰角-载机俯仰角。对两次标定时刻数据进行了仿真计算,得出两组数据的修正量∠α 分别为3.43mrad 和4.32mrad,求平均值并取整后取4mrad。火控修正雷达指向后预期AGR 测距=OC/sin(∠OAC+4mrad),分析数据见表1。
使用标定时刻数据计算为例,OA=7708m,OB=7193m,OC=836.83m,∠OBC=arcsin(OC/OB)=6.7 度。
对雷达记录数据进行分析,发现雷达输出至任务机的测距值与雷达记录仪中的测距值偏差较大,雷达记录测距值更接近理论斜距。
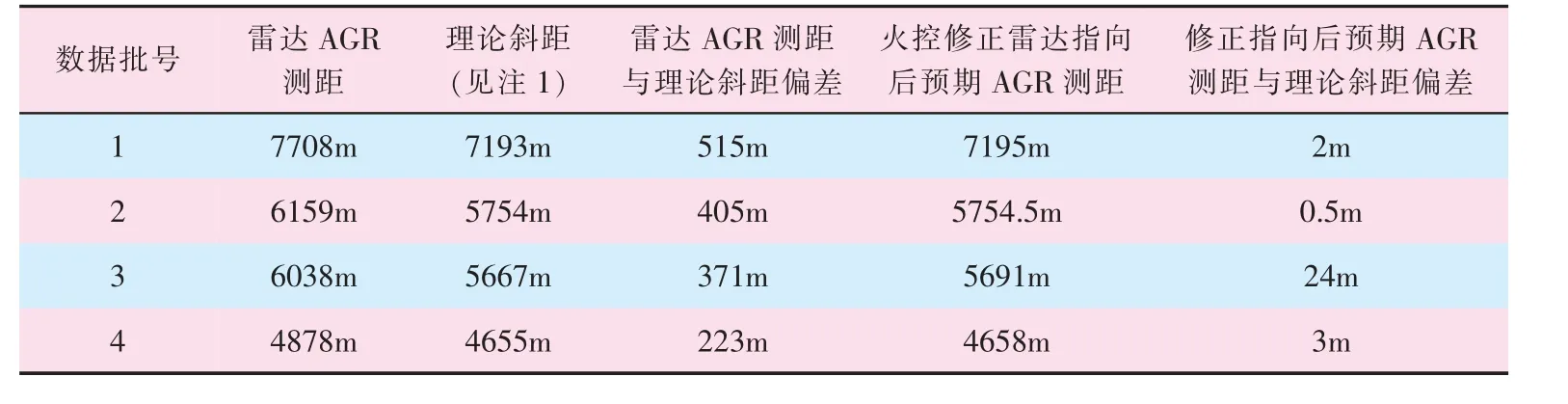
表1 火控修参理论分析数据
由于输出至任务机的测距值是对记录的测距值进行了数据滤波处理,将当前测量值与前面的20 次测量值进行了数据滤波处理,雷达当前的真实测量结果不能准确输出,因此可以认为雷达测距精度差是由数据滤波处理引起。仅通过调整火控参数无法修正雷达AGR 测距的偏差。
3 误差原因分析
3.1 AGR 测距原理
AGR 是受火控角度控制进行无线电测距的,根据比相天线原理,利用雷达天线和差方向图特性,在指定的角度找和路信号最大、差路信号最小的位置,可知天线俯仰差波束角误差为零就是波束中心指向位置。因此,波束擦地角大,则波束集中,覆盖面小,测距精度高。
3.2 雷达AGR 处理方法
雷达输出的测距值是输出前n 次测距值进行平滑滤波的结果。

式(1)中,R 实际输出(tn)为tn 时刻雷达向任务机输出的测距结果,F(n)为平滑滤波函数,[Rt1,……,Rtn]为n 次实时测距结果,n 为滤波器长度。
为消除标定误差等带来的数据波动,保证标定时刻后连续数据的绝大部分有效,目前n 取值为20。n取值越大,数据更新响应越慢,而CCRP 模式投弹需要的是雷达标定时刻的测距结果,n 取值较大会导致雷达不能将标定时刻的准确测距数据发送给火控系统,尤其是针对CCRP 模式下标定目标对准时,导致标定时刻的雷达测距偏差变大。
3.3 分析结果
数据分析表明,雷达测距数据经过平滑滤波后,在标定时刻跟随性变差,指向收敛变慢,导致CCRP模式下标定测距误差较大。
4 解决措施
在目前地靶标定准确,火控算法优化后,火控精度误差很小的情况下,测距数据波动减小,雷达输出测距信息不会因某一帧数据大的变化而出现抖动现象,而雷达数据处理平滑滤波设置过长,即公式(1)中的取值较大,会使测距变化趋势变化过慢,误差加大。
为了使测距变化趋势加快,应降低n 的取值,雷达内部算法要求n 应为偶数,n 最小可取值为2。按照公式(1)进行仿真,n 为2 和4 时,误差基本相当,n 为6 时,误差增大到约150m 量级。因此可将公式(1)中n 取值调整为4,此时可使雷达测距信息输出收敛变快,加快测距信息趋势变化的跟随性,满足CCRP 投弹要求。
5 结 论
根据雷达测距调整结果,结合标定时刻参数,对投弹偏差进行仿真,如图4 所示,O 为标定时刻载机位置,A 为弹着点,B 为仿真弹着点,θ 为雷达擦地角,BC 为AGR 测距修正量,AB 为弹着点修正量。一般来说θ 小于10°,可近似认为AB=BC×cosθ。计算结果如表2 所示。
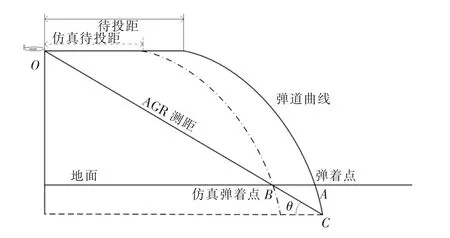
图4 AGR 测距变化对弹着点影响分析
表2 雷达AGR 修正后弹着点偏差预计
AGR 测距修正后,通过仿真计算,弹着点偏差最大74 米,雷达测距误差随动火控系统误差,实验仿真的测量数据在标定时刻的误差值满足CCRP 投弹要求。
