“速度低”告警速度的分析方法研究
2020-08-17蒋盼盼杨昌发江维毛玥
蒋盼盼,杨昌发,江维,毛玥
(航空工业洪都,江西 南昌,330024)
0 引 言
现代飞机特别是现代高机动性飞机其代表性的特点是有大量的各种各样的飞行限制和使用限制[1],常见的如迎角/过载限制和滚转限制等,这些限制用于保障飞行安全,使飞机不容易出现失控状态。但是当飞机在进行高俯仰姿态和低速度的倒飞飞行时,容易出现倒飞俯仰偏离,如经常遇到的以很慢的速度过顶点的飞行。此外,当飞行速度低于某个门限值且伴有突然的杆指令输入时,正飞或倒飞俯仰偏离也可能发生,此时无论俯仰姿态如何。偏离意味着飞机失控、飞机处于危险飞行状态,为了避免低速度下的危险情况发生,提高飞行安全性,希望飞机飞行状态接近安全边界时,有速度告警点,对飞行员发出明显的信号提示,提醒飞行员立即采取改出措施[2]。为了确定速度告警点,本文对 “速度低” 告警速度的分析方法进行了研究。
1 “速度低” 告警应用情况
在F-16C 飞机上有一个 “速度低” 的语音告警,当存在以下条件之一时,将在头戴式耳机里听见稳定的 “速度低” 告警音:
1)当起落架手柄在放下位或高度襟翼开关在EXTEND(延展)位置,攻角大于或等于15°。
2)起落架手柄在收上位且高度襟翼开关在NORM(正常)位置,空速和俯仰角组合落在告警音区域某一点上。
3)TFR(地形跟踪雷达)工作且空速降到300 节以下(校准空速或地速)。
对于第二个触发条件中提到的告警音区域如图1所示,当空速和俯仰角组合落在区域中某一点上时,反映了飞机已处于一种边界条件,如果继续保持状态不执行改出操作,飞机将有可能出现偏离,所以在飞行过程中一旦触发 “速度低” 告警,应立即采取改出措施。
2 分析方法概述
参考图1 的 “速度低” 告警形式,即以俯仰角为变量给定 “速度低” 告警值,结合飞行力学理论,给出以下两种分析方法。
2.1 分析方法一
基本思路:假设飞机在铅垂面内,以给定的飞机重量、给定的发动机状态,保持某个给定的俯仰角爬升,当减速到某个速度值Vwarn 时,飞机开始出现 “速度低” 告警语音,此后飞行员在一定的时间内对该告警做出反应并操纵改出,若飞行员未进行反应和改出操纵,则飞机继续爬升减速,直到飞机达到限制攻角或限制速度,进入不安全状态。
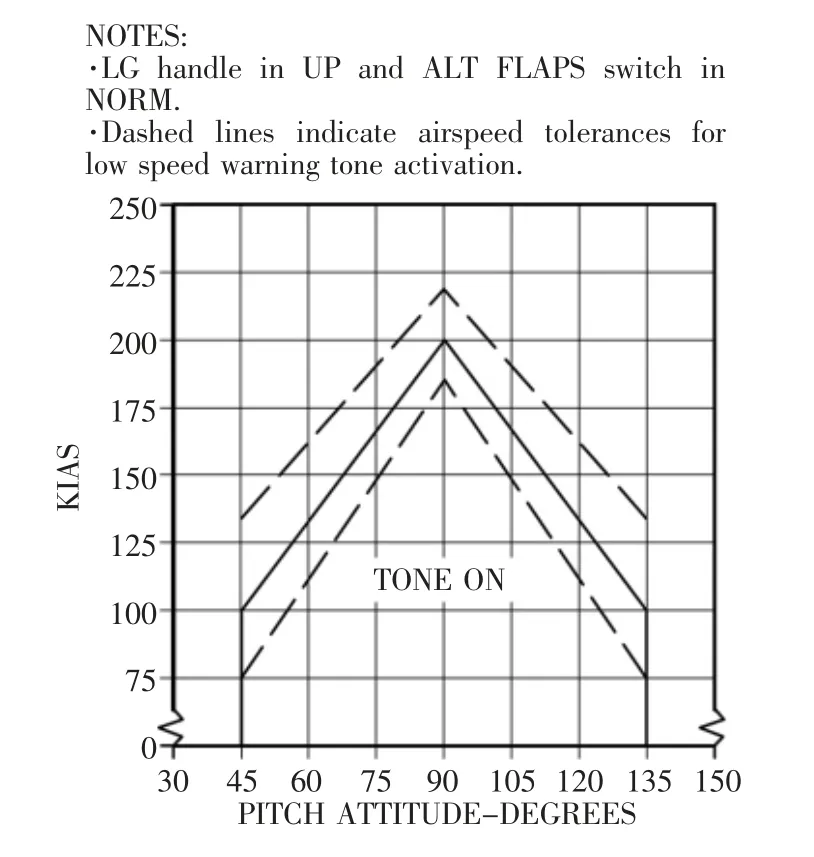
图1 “速度低” 告警
该分析方法使用的数学模型[3,4]如下:
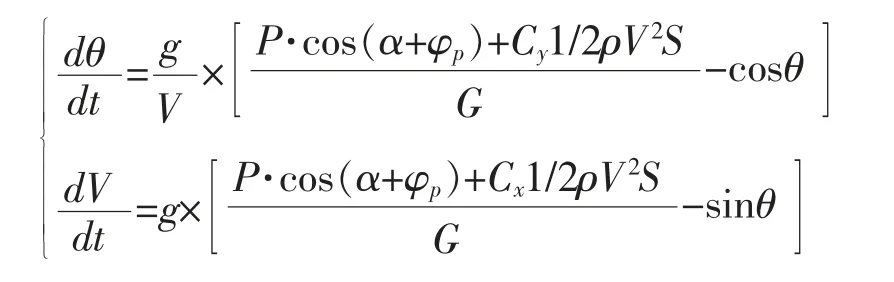
式中:α、ϑ、φp—分别为迎角、航迹倾斜角、发动机安装角,Cy、Cx—升力系数、阻力系数,G—飞机重量。
2.2 分析方法二
考虑到实际飞行中飞机可能带有坡度,此时为了平衡重力分量,需要使用更大的迎角,相应的阻力增加,在其他条件都相同的情况下,此时减速度会更大,用方法一获得的速度告警值可能会偏小,因此考虑用保守的方法二进行分析。
方法二的基本思路与方法一的区别如下:在整个飞行过程中使用限制迎角对应的气动力数据。
该分析方法使用的数学模型如下:

式中:α、θ、φp—分别为迎角、航迹倾斜角、发动机安装角,Cy、Cx—升力系数、阻力系数,G—飞机重量。
3 计算结果分析
通过matlab 软件建立两种分析方法的仿真模型,并以某型飞机为例进行仿真分析,其中方法一仿真条件设置为: 高度:5000m; 俯仰角:30°,40°,50°,60°,70°,80°,90°; 发 动 机 状 态 (×最 大 状 态):1,0.8,0.6,0.4,0.2;飞机重量:使用轻载构型和重载构型的典型重量;结束条件:达到相应构型的限制迎角或限制速度。计算历程时间是根据模拟飞行时飞行员对告警做出反应并操纵改出所需要的时间确定的。具体计算结果见图2 和图3。
方法二仿真条件与方法一的基本相同,区别在于仿真结束条件为达到轻载构型或重载构型的限制速度。具体计算结果见图4 和图5。
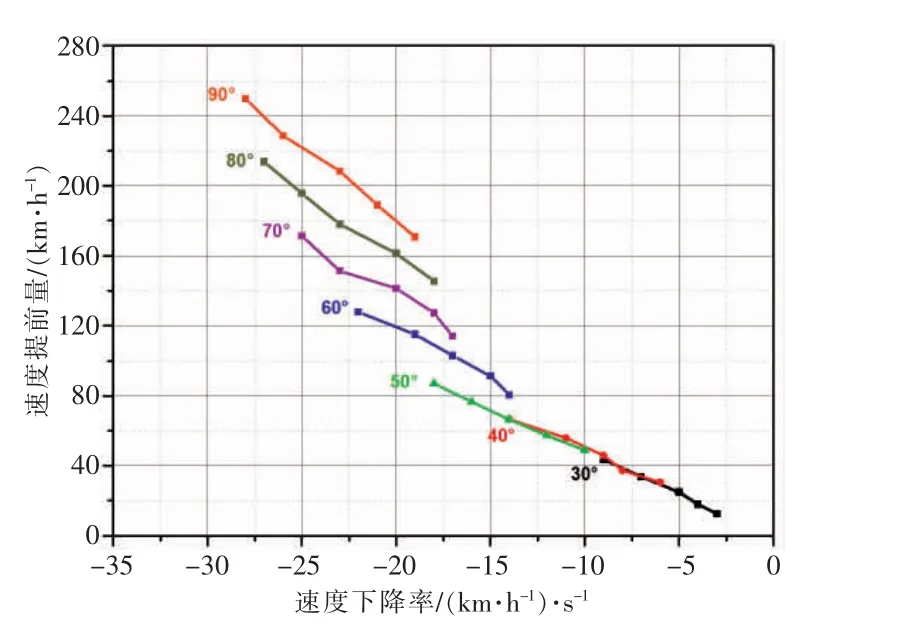
图2 轻载构型 “速度低告警” 速度值
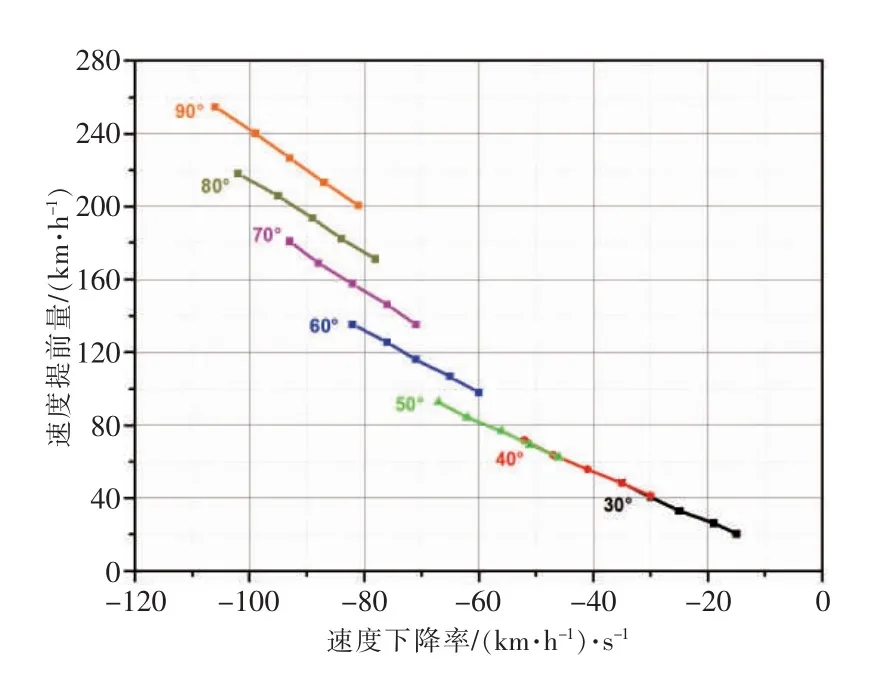
图3 重载构型 “速度低告警” 速度值
图4 轻载构型 “速度低告警” 速度值
图2~图5 为速度提前量(以告警速度值与限制速度差量的形式给出)随速度下降率变化曲线。由图可知,在计算高度上,方法一计算的速度提前量集中在260km/h 之内,方法二计算的速度提前量,除轻载构型90°俯仰角的速度提前量外,集中在400km/h 之内。相对方法一,方法二的计算结果更保守;图中显示,速度下降率增加,速度提前量也随之增加,该结果符合飞行一般规律,合理可信。
图5 重载构型 “速度低告警” 速度值
4 与实际飞行数据对比
本文针对速度下降率参数,在相同条件下,将两种分析方法的理论计算值与实际飞行值进行了对比,详见表1 和图6。
表1 速度下降率
图6 与实际飞行数据比较结果
从表1 及图6 可以看出,方法一的计算结果与实际飞行结果非常接近,只在大俯仰角情况下(>80°)差距会大一些,当俯仰角为90°时,方法一计算的速度下降率比相同条件下的实际飞行速度下降率小21%左右,此时计算得到的低速度告警值会偏小,安全性会差一些。方法二的计算结果在俯仰角不超过60°的情况下与实际情况接近,但由于仿真全程使用的是限制迎角对应的气动力数据,俯仰角超过60°之后结果就显得比较保守,当俯仰角为90°时,方法二计算的速度下降率比相同条件下的实际飞行速度下降率大91%左右,虽然安全性很好,但是限制了飞机在大俯仰角情况下的飞行能力。
5 结 语
本文通过研究 “速度低” 告警的实际应用情况,运用飞行力学理论,提出了两种 “速度低” 告警速度的分析方法,阐述了其基本原理和计算方法,给出了数学模型,并基于某型机的气动、动力等平台,使用matlab软件实现了两种方法的仿真分析,从仿真曲线以及与实际飞行数据的对比情况可以看出,方法一的计算数据与实际飞行数据接近,仅在大俯仰角情况下(>80°)存在一些差距,此时获得的速度告警值偏小。方法二的计算结果在俯仰角不超过60°的情况下与实际情况接近,但俯仰角超过60°之后就显得比较保守。两种 “速度低” 告警速度的分析方法,可以满足飞机 “速度低” 告警系统开发的部分需求,可作为开展此方面深入研究的基础。
