果农辅助采摘装置在现阶段的发展前景
2020-08-07魏常武王曦杨李伟冯喆殷士恒
魏常武 王曦杨 李伟 冯喆 殷士恒
摘要:随着生活水平的提高,经济的发展,国民生活条件逐步提高。国民对水果的需求量增大。而果树种植就涉及到了果实的采摘。传统的果实采摘过多的依赖人工,这也造成人力物力财力的大量浪费,不能实现更高效率的采摘。所以机械化采摘方式愈发的显得尤为重要。通过对果农采摘的需求,研发设计了果农辅助采摘器。做到一人一机,降低果农采摘水果的劳动量,提高了采摘效率,提升了水果完好率。极大地改善了传统采摘水果过程中的一些诟病。
Abstract: With the improvement of living standards and economic development, the living conditions of citizens have gradually improved, and the national demand for fruits has increased. The planting of fruit trees involves the picking of fruits. The traditional fruit picking relies too much on labor, which also causes a lot of waste of manpower, material and financial resources, and cannot achieve more efficient picking. Therefore, the mechanized picking method becomes more and more important. This paper developed and designed fruit farmer auxiliary pickers through the demand for fruit farmers' picking. It achieves one person and one machine, reduces the labor of fruit farmers to pick fruits, improves the picking efficiency and the fruit intact rate, and greatly improves some of the criticisms in the traditional fruit picking process.
關键词:机械化;采摘;发展前景;辅助
Key words: mechanization;picking;development prospects;assistance
中图分类号:S225.1 文献标识码:A 文章编号:1006-4311(2020)22-0236-04
0 引言
中国是水果生产销售大国,其中苹果、梨、橙等带有桔梗的水果,他们的产量在世界的水果产量的排名中也排在了前三的位置。经过测量计算,果园需要水果产业整体劳动力的35-45%。但是,果园的机械化程度在中国比较低。农业机械化在提高单位耕地面积的总农业产量、减少农业劳动力的使用、提高农业劳动生产率和优化农业结构方面发挥着重要作用。当前的采摘模式下主要有两种果树机械采摘方法,一种是机械式采摘,另一种是机械辅助式采摘。而中国机械化采摘一直存在着低效率、易损、果实机械输出损失大等问题。中国的果实产量主要集中在南方,这里由于山区地形制约,拖拉机驱动的大型收获机器的工作很困难。因此,便携式的果实采摘机就更为适合这样的环境。
1 发达国家采摘机械的发展历程
1.1 机械化采摘
1.1.1 机械化采摘的分类
一般的机械化的采摘果园主要是有三种机械化采摘的类型。其中振动的种类是使用外力来振动或摆动树枝的树木,所以水果产生适当的加速,并将其与树枝分离成最弱的连接。冲击的种类是,果实的枝头受到冲击的部分直接影响果实的枝头,或是敲击树木的框架,使果实的枝头振动。切割类型是在切断树枝和果实的时候,从果树中分离水果的方法。同时,切削型分为机械的切削型和动态的切削型。
1.1.2 机械式采摘工具的现状
欧美等国所带领的欧洲国家。1950年代初期,对相关果园的机器进行了深入的研究。研究始于1950年代中期的美国。当时震荡机会被用来选择采摘一些梨、核桃和其他水果。直到1960年代中期,这种采摘机在美国和其他国家被开发出来。同时在多个国家被广泛使用,之后还有拖拉机驱动的采摘器。1970年代,振动采摘机的构造不再单一,而是由推式和震式发展成各种振动机械。例如惯性振动机械。然后,为了进行有效的振摇,使用了由动力驱动的软木橡胶棒的果园振摇机械。但是,那个时代的机械摘果的效率一般很低,对果实的损害也很高。很多水果因为采摘器的采摘问题而受损。这样也就导致水果的质量会变差。因此,这些挖掘机并不适合采摘这些需要高完好率和容易造成外表损坏的水果。到1970年代中期为止,欧美发达国家的研究者研究了欧洲和美国的几个国家果树栽培、采摘果实、果实管理等有关果实种植、管理、采摘的一系列过程。制作了很多适用于采摘和水果农业防治的驱动采摘机。1980年代之后又有各种各样的切断机。类似于:割草机、气动锯等。比较有名的有意大利公司campagnola、日本ARS公司及其他机械化公司。这些企业为机械采摘机的进步和发展做出了卓越的贡献。
例如,在日本,平地只占全地面积的29%。由于这些果园的地形与我国南方地区的外观相似,所以比较大型的采摘机在日本并不特别适合,但是是比较小的辅助采摘机,在日本很普遍。由于他们的小质量、低价格、搬运简单、耐用等特点,这些辅助挖掘机非常适合他们的果园。同时,日本果园的机械化普及率比较高。大部分果园的栽培者对机械化的采摘有着特定的理解。这也为我们的机械化普及做出了良好的先例。
1.2 智能机器人采摘
1.2.1 智能机器人采摘的研究现状
目前,在美国等欧洲发达国家,机器的主要研究发展方向还主要是机器人采摘。从70年代到80年代,随着PC网络和PLC控制技术的快速发展,美国成为83年以来研究所有种类农业智能机器人的第一个国家。最初的智能取货机器人是在美国开发的。至此之后经过几十年的努力和创新,越来越多的发达国家开始进入智能机器人研发的行列。当然,成功总是伴随着失败。在各种各样的失败之后,发达国家越来越多的开始有了自己的采摘机器人。例如,可以采摘梨、苹果、李子等带有桔梗的智能采摘式机器人。在这些发达国家,智能采摘机器人型的研究不仅开始的较早研发的较快,而且可以说还具有非常猛烈的发展势头。
1.2.2 人机协作型研究思想
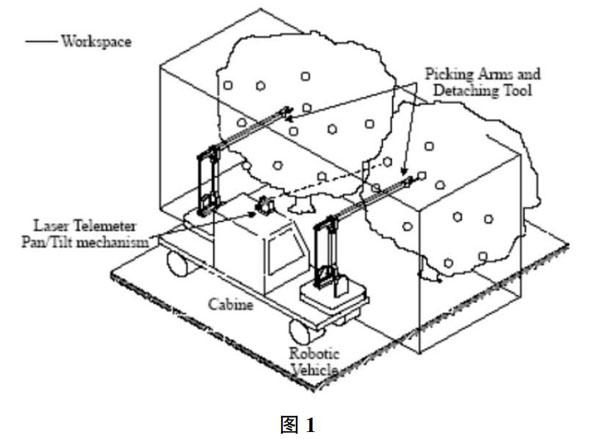
人-机械协调的研究理念是指机器人选择的果实的探索、位置决定、移动的工作,由机器人的控制系统完成轨道计划、共同控制、末端执行器控制的任务。图1中展示了基于人类机械协调想法的工业自动化西班牙研究所开发的柑橘类选拔采摘机器人agribot。机器人是由激光测距录影器、机器移动机构、控制装置、操作手、自动化机器人、终端执行器等构成。在摘取果实的过程中,我们将自动化采摘机器人通过外置游戏平台的手柄操作让激光测距录影器的激光束定位到果实,然后把它的坐标放置于我们的参考系中,之后,控制系统会从中提取出果实相对应的坐标数据。与机器人端致动器的当前坐标相比,计划最佳的采摘路径,控制关节轴电机的运动,机器人端致动器到达指定位置。
合理的人类机械分割和协调不仅提高了智能机器人的紧急性和处理系统稳健性的能力,而且在不增加系统的复杂性和成本的情况下,还提高了探测的成功率。人类-机械协调定位机器人的研究具有实用意义。不仅提高了机器人的采摘效率和成功率,还将尽快大幅降低有助于机器人工业化的系统成本。
2 果园采摘机械在目前中国的发展以及前景
2.1 机械化采摘
中国从上世纪70年代开始研究相关的果园机械。因为当时的经济条件有限,没有太过高端的电脑以及激光测距仪,因为在那个年代中国的农业生产普遍依靠农用拖拉机,所以当时的采摘机械主要利用拖拉机作为主要动力源来进行果树的采摘等一些方面的设计。这样制造出的辅助机械虽然可以有效地保护好果实的完整率,但是它的效率太低不足以媲美人工采摘。到了80年代初,我们开始研制更新一代的采摘器,我们将切割采摘器作为主力发展研发出了可以利用拖拉机作为动力源的切割装置,可以直接对果实的枝杆进行切割,让果实掉落。同时,这样的机械不仅保证了瓜果的完好率,同时也提高了效率。其次还有一种震荡式采摘器,这种采摘器。通过它的传导拨片将震荡传导至果树上,让已经熟透的瓜果因为震荡而掉落在地上。这样的发明,可以很好的提高果实采摘的效率。但是有一个缺点就是采摘的果实因为高处掉落容易损坏。所以这样的机器还有待改善。其次,我国还研制出利用空气风力来将果实吹落的机械。这样的机械可以借助鼓风机将大量的气体吹到果树上,让果实因为受到风力的作用而掉落。但是它的采摘效果不是很好,进场会将果实吹得很远而造成果实的损害,所以很快就被市场所淘汰了。
1990年代以后,市场因素促进了果树栽培的兴起,许多中小品种的需求带动了单纯的采摘器市场。从那以后,气压剪切机、辅助提升平台和其他机器纷纷进入市场。1992年,浙江金华农业机械研究所以高7米的高度,研究了为摘水果而使用拖拉机操作的电梯。这是一种具有维修、修剪、喷雾、运输、发电等功能的自动驾驶机。其原理是,汽油引擎将动力的一部分分配给主引擎的齿轮箱,齿轮箱驱动2个橡胶卡车行走。另外,其他部分还驱动双筒空冷空气压缩机,为空气修枝机和电梯提供力量。橡胶轨道步行部被用于果园柔软潮湿的环境。连接到空气压缩机的提升平台高1.5米。这台机器的成功发展表明,我们国家果园的单个采摘机进入了多功能工作机的时代。
我国南方大部分果园并非在平原地带。而是在山坡,丘陵等地区,所以相对来讲比较大型的机械采摘方式。反而不太适用于我们国家的采摘现况。同样,我们国家的果园种植户对机械采摘这方面的认知度还不是太高,所以对于机械采摘。重视程度并没有达到发达国家那样的水准。而大型的采摘机器成本又比较高昂。普通的种植户他的种植量没有达到一定的规模,不太会采用这种大型的机械化采摘手段。相比较来说,比较小的辅助型采摘记反而更加具有优势。为了在台湾省的倾斜地带对果园进行机械化管理,研究人员开发了适合倾斜土地操作特性的自走牵引式振动收获机。该机器以适宜坡地行走的搬运车作为主体进行移动,将360台旋转圆板安装在振动机下,采摘果实时它会按照指令发出旋转,将牵引杆与树干对齐。牵引式推杆配备了4个可以自动调整推杆角度的连杆,这个状态下的推杆是最有效的工作角度。当树干和推杆头之間的绳子拉紧时,果实可以在张力下掉落。
2.2 智能果园机器人采摘
在果园机器人采摘的研究中,我们国家刚刚开始。2006年,“第十一个五年计划”全国高科技研究发展计划(863计划)启动,高科技项目《果树采摘机器人关键技术研究》得到推进。近年来,中国很多大学都积极参与农业机器人的研究。通过跟踪外国的尖端技术,在机器人维修领域取得了初步结果。例如,上海交大对黄瓜机器人进行了研究,而中国农业大学则对Pibot机器人的视觉识别系统进行了研究,华东交通大学对南方丘陵山区果园管理及智能机械化机器人采摘进行了研究,浙江大学则对七自由度番茄收获机械手的优化设计研究和机构分析。目前,具有代表性的采摘器机器人是人计算机协调柑橘类拾取采摘机器人,多功能葡萄藤蔓果实采摘器机器人。当然这些都只是我国在智能机器人采摘道路上的一些不断尝试,后面还有很多进步和发展空间。而这段时间经过疫情的影响中国采摘机器人的需求有了不小的提高。复产复工以后各厂商也开始加紧研制相应的采摘机器人,所以采摘机器人在目前中国虽然尚未达到普及,但是它的发展前景不容小觑,未来发展趋势也是一片大好。
3 果园机械存在的问题
在我国采摘园行业里有研究人员做过一项统计调查。超过五成的果农认为在采摘环节中最大的问题就是采摘人员的成本过于高昂。其次还有二成果农认为采摘机的利用率不高,一个机器可能只能采摘少数的几种水果。另外两成果农面临着采摘机器过重无法很好搬运,移动困难,导致其利用率比较低。还有一成果农遇到的问题是所采用的采摘设备它能承载的果物数量很少,无法达到采摘的需求。从而使果农采摘率比较低。其中在我国现有的经济环境下从事果农种植行业的农民最大的问题是果农种植从业人员的素质偏低,但是如果雇佣高素质的采摘人员来进行作业的话,势必会加大他们的人工成本投入,而采摘果物只是果农进行果物售卖的一个环节,太多的沉没成本势必会导致果农前期的经济负担加重,这样的情形对果农来说是不敢轻易承担的。其次,研究人员在调查过程中多次察觉到机器的易损性也很程度上影响着果农对机械化采摘的信心,因为果农种植户一般都会在比较偏僻的丘陵山区进行种植,而一旦机器损坏,种植户自己无法进行维修,而维修站的人员有过于遥远,很容易耽误水果本就较短的采摘期。
同时有近三成的果农认为市面上许多的大型采摘机械,他们的问题是运输机过程中不好搬运也没有办法灵活地在各个地方使用。这个问题对于小型种植户来说可以说是无法接受的。它的利用率低,也就导致了在各个环节上果农必须采购其他的相关机械,这样的话一方面增加了采购机械的费用,增加了采摘成本,其次,这样购进好几种采摘机器会是材质人员对机械化的采摘模式失去信心。这些问题是中国果园机械发展中经常出现的一些问题。而对于这些问题多功能的辅助采摘机器就可以很好的解决这个问题。
目前,中国研发的果实采摘机的通用性和利用率并不是太好,这也是限制采摘机开发的主要原因。在国外,由于农艺和农业机械的组合、机械化操作的方便快捷、同时对果园栽培管理的关注。研究者提出的新的定位方法和果树栽培模式还能有效的提高果树对阳光的利用率。而这些研究也为了果农们能更好地进行机械化操作做出了很好的铺垫。这样的研究对果农是有机械化采摘器有帮助,同时还可以利用到大量的自动化机器的使用中。而在欧美等发达国家的大规模果园环境控制中,计算机开发了“精准定量”控制理论,由计算机分析果园的经济利益,研究降低成本,减少劳动力,增加收入的最佳策略。
相比之下,中国几乎没有大规模的现代果园,主要是分散性的栽培、家庭经营和集中性的统一经营。这种小规模农业的经济种植形式,根据传统经验维持果园的生产管理,难以实施标准科学的生产管理方法,果园机械化程度一般较低。
4 中国目前辅助果园的发展前景及优势
现代农业的根本趋势,提高农用资源的利用率、降低人工劳动强度、提升相对应的农业生产率、提高果园经济效益。同时由于成本技术还有研发速度的影响。中国目前的机器人采摘正处于研发阶段,可以说要做到大量普及还有很长的一段路要走,而在这种智能机械采摘尚不成熟,手工采摘又费时费力的背景下,辅助式的机械采摘必将拥有很大的市场竞争力。而辅助式机械采摘目前也逐渐成熟化、多样化,也可以很好的满足果农对采摘机械的大部分需求。同时辅助机械采摘在发展的过程中具备了以下的几个特点:
4.1 操作简单、可靠性高
机械式采摘设计高的机械专业知识并不多,对于农学历较低的采摘果农来说,比较容易上手,同时机械式采摘相对于人工采摘来说效率比较高,对于单个采摘器来说成本也很低,比较适合中国目前的果农实际情况。
4.2 通用性好
便携式机械采摘器相对于大型机械采摘器来说,它的主要优点是单个果农可以携带,对于中国来说,大多数的种植果园分布在南方的丘陵山区地带,太过大型的采摘机,可能会有无法上山,无法到达指定的果园等一系列问题。而便携式机械采摘机就解决了这个问题,可以很方便携带,也就可以随果农进入一些比较偏僻的果园进行采摘。
4.3 自动化和智能化
随着科技的进步和经济的发展,我国的果农采摘市场会逐渐的走向智能化及自动化。所以我国的机械化采摘器的发展是必然趋势,而便携式机械化采摘器也就是由手工采摘往全自动化采摘的过渡阶段,这也符合目前中国的采摘行情。也方便普及机械化采摘,为机械化采摘的普及做出一定的贡献。
4.4 利用率高
可以对多种带梗的果物进行采摘,同时经过合理的设计,辅助式采摘机械还可以做到更换采摘头对更多的水果及农作物进行有效快速的采摘,这样也很大程度上提高了采摘器的实际利用率,使得采摘机械的优势更加明显,种植户也愿意去尝试。
4.5 多功能化
该采摘机不仅仅适用于单一作物。而且还适用于大部分带枝梗的水果,通过采摘机的切割,这些水果都能完成切割,最终实现采摘机一机多用。
4.6 低成本的采摘器
成本较低的采摘器可以方便日后的推广普及,果农买的起,也用得起,而且较低成本的采摘器也给果农减轻了许多不必要的负担。
5 结束语
采摘水果是非常有意义的研究方向。现在,中国是人口最多的发展中国家。随着中国科技的进步和经济的发展,中国国民的整体生活水平也大幅提高,水果需求也大幅增加,对果树产业也进行了严峻的考验。水果采摘也逐步智能化、高效化和机械化。原来的人工的采摘渐渐被取代了,新的机械化维修还没有完全普及。因此,有必要出现辅助摘果机。由于人口老龄化和农村劳动力的转移,在采摘果实的单调和危险的作用下,高效、普遍、低成本的收获技术成为当务之急。另外,机械采摘方法远优于机器人的挖掘机和大规模的机械自动采摘,适用于现在中国的栽培產业的利用。因此,作为果树选拔机的新一代,研究辅助果实采摘机非常实用重要,同时,对中国的经济发展和机械化发展也有很重要的意义。
参考文献:
[1]陈翊栋,刘轶.果树气动剪枝机工作原理及现状[J].农业机械,2008(9).
[2]宋健,张铁中,徐丽明,等.果蔬采摘机器人研究进展与展望[J].农业机械学报,2006(5).
[3]蔡殿选.陡坡地果园的机械化及课题[J].热带作物机械化,1992(2).
[4]鲍官军.浙江工业大学青年学术带头人和学术骨干支持计划申请表[EB/OL].2010-01-01.http://www.rsc.zjut.edu.cn/2008.
[5]刘贯博.由日本果园机械化现状看我国果园机械发展趋势[J].北方果树,1994(1).
[6]姜丽萍,陈树人.果实采摘机器人研究综述[J]农业装备技术,2006(1).
[7]刘西宁,朱海涛.巴合提牧神LG-1型多功能果园作业机的研制[J].新疆农机化,2009(1).
作者简介:魏常武(1972-),男,安徽合肥人,安徽建筑大学讲师。