影响REDUCT惯性定位系统的测量精度因素分析
2020-07-31孙冬进


摘 要:地下管线三维轨迹惯性定位是一种抗干扰能力强、定位精度高的地下管线定位技术。该文通过对REDUCT公司的两款惯性定位系统进行实验,定量分析了里程仪的误差及惯性定位系统的运动速度对其测量精度的影响,为今后工程实践提供了宝贵经验,为持续改善和提高地下管线三维轨迹惯性定位系统精度理清了思路。
关键词:惯性定位;一组测量;轮组修正比;弥散度
中图分类号:TU990.3;TN96 文献标识码:A 文章编号:2096-4706(2020)04-0057-05
Abstract:The three-dimensional trajectory inertial positioning of underground pipelines is a kind of positioning technology with strong anti-interference ability and high positioning accuracy. Based on the experiments of two inertial positioning systems of REDUCT Company,this paper quantitatively analyses the error of odometer and the influence of the motion speed of inertial positioning system on its measurement accuracy,provides valuable experience for future engineering practice,and clears up the train of thought for continuously improving and improving the accuracy of three-dimensional inertial positioning system for underground pipelines.
Keywords:inertial positioning;a set of measurements;wheel set correction ratio;dispersion
0 引 言
随着城市规模的不断扩大,城市地下管线日趋复杂。近年来,城市化的进程的加快,道路的管线不断敷设,主干道路的地下空间日趋饱和。非开挖施工方式(尤其是水平定向钻HDD施工技术)的引进,对阶段性缓解城市地下管线敷设难有一定的帮助。此种技术敷设的管道一般埋深较深(3~30 m),很大程度上拓展了城市地下管线敷设的空间,但是同时带来了敷设管道位置探测难的问题。传统的探测手段受到地磁干扰、地面限制、埋深过深等诸多因素的影响,无法提供敷设管道精确的三维轨迹,给日后的地下空间的规划与利用带来不少麻烦。2009年国网上海电力公司引进比利时REDUCT公司惯性定位仪进行非开挖施工的电力管道的三维轨迹探测,取得了一定的成效,近年来逐步推广至燃气、自来水、航油等长输管道中。然而REDUCT惯性定位系统的误差究竟如何呢?近年来,也有不少用户进行了相关的验证,然而对影响REDUCT惯性定位系统的误差的因素分析甚少,本文从惯性定位仪的基本原理入手,通过一定的实验来分析测量时间与里程仪的精度对REDUCT惯性定位仪精度的影响。
1 REDUCT惯性定位系统工作原理
如图1、图2所示,REDUCT惯性定位系统主要由数据处理单元、惯性测量单元(加速度计、陀螺仪)、外部控制器、供电系统、轮组等部分组成。
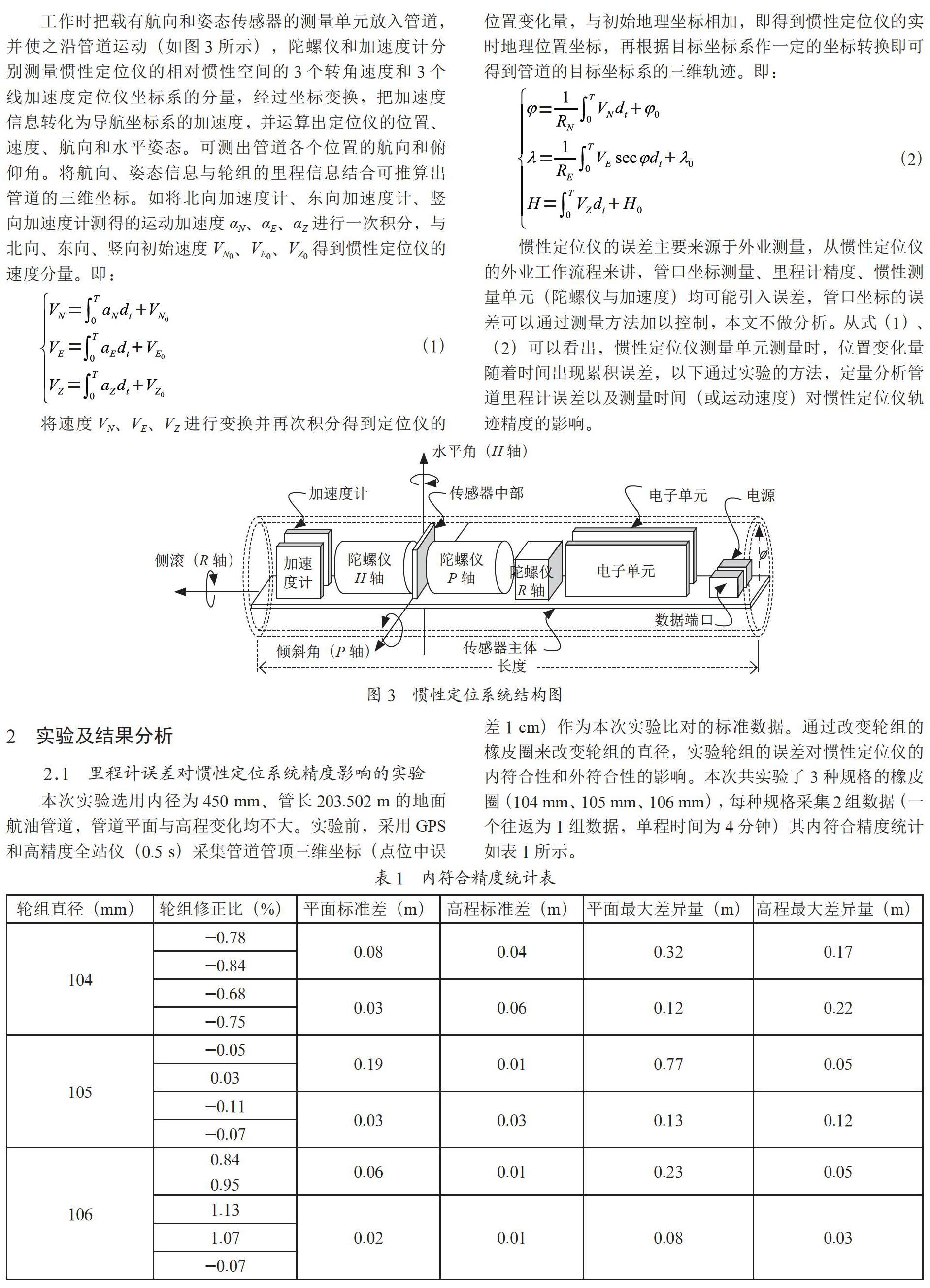
工作时把载有航向和姿态传感器的测量单元放入管道,并使之沿管道运动(如图3所示),陀螺仪和加速度计分别测量惯性定位仪的相对惯性空间的3个转角速度和3个线加速度定位仪坐标系的分量,经过坐标变换,把加速度信息转化为导航坐标系的加速度,并运算出定位仪的位置、速度、航向和水平姿态。可测出管道各个位置的航向和俯仰角。将航向、姿态信息与轮组的里程信息结合可推算出管道的三维坐标。如将北向加速度计、东向加速度计、竖向加速度计测得的运动加速度αN、αE、αZ进行一次积分,与北向、东向、竖向初始速度VN0、VE0、VZ0得到惯性定位仪的速度分量。即:
惯性定位仪的误差主要来源于外业测量,从惯性定位仪的外业工作流程来讲,管口坐标测量、里程计精度、惯性测量单元(陀螺仪与加速度)均可能引入误差,管口坐标的误差可以通过测量方法加以控制,本文不做分析。从式(1)、(2)可以看出,惯性定位仪测量单元测量时,位置变化量随着时间出现累积误差,以下通过实验的方法,定量分析管道里程计误差以及测量时间(或运动速度)对惯性定位仪轨迹精度的影响。
2 实验及结果分析
2.1 里程计误差对惯性定位系统精度影响的实验
本次實验选用内径为450 mm、管长203.502 m的地面航油管道,管道平面与高程变化均不大。实验前,采用GPS和高精度全站仪(0.5 s)采集管道管顶三维坐标(点位中误差1 cm)作为本次实验比对的标准数据。通过改变轮组的橡皮圈来改变轮组的直径,实验轮组的误差对惯性定位仪的内符合性和外符合性的影响。本次共实验了3种规格的橡皮圈(104 mm、105 mm、106 mm),每种规格采集2组数据(一个往返为1组数据,单程时间为4分钟)其内符合精度统计如表1所示。
REDUCT惯性定位系统通常用轮组修正比、平面标准差(软件称平面弥散度,在标准差后加%)、高程标准差(软件称高程弥散度,在标准差后加%)、平面最大差异量、高程最大差异量来表示其内符合性精度,关于以上指标的公式和定义如下:
从表1可以看出,105 mm是该轮组在系统内标准值,在不考虑其他因素影响的情况下,轮组半径小于标准值,长度修正比为负,且越小,长度修正比的绝对值越大,并呈现出线性关系,但对其他参数没有明显的影响。将三组数据分别以1 m采用间隔输出,跟全站仪测得管道的轨迹进行比对,得到其外符合精度,具体精度指标如表2所示。
从表2中可以看出,轮组直径的改变对平面中误差、高程中误差、平面最大差异量影响没有规律性,但对高程最大差异量影响较大。轮组直径为105 mm时,高程中误差与最大差异量均比较接近标准值。三种轮组直径高程曲线图如图4所示,从图中可以看出,在改变轮组的直径时,其高程的变化比较明显,104~106虽然轮组仅仅变化2 mm,但实际高程影响约0.15 m,根据实际项目验证,其影响跟管线的埋设深度和管长成正比。由于定向钻施工时,平面的曲线变化一般要小于高程曲线变化,所以轮组修正比对平面的影响相对较小。对于非开挖施工的长输管线(埋深较深,长度较长),要特别注意轮组直径,建议轮组的直径与标准值误差小0.5 mm,否则需更换轮圈或者对轮组直径值进行修正,减少轮组本身误差对测量精度的影响。
2.2 运动速度对惯性定位系统精度影响的实验
本次实验用DR-HDD-4.2在实验管道内分别以2 min、4 min、8 min、12 min的测量时间测量管道的轨迹,另外一套ADM-90以2 min、4 min、8 min的速度采集数据,共计采集了12组数据。以上数据采集均采用卷扬机进行牵引,速度较为匀速,实验数据的内符合精度统计如表3所示。
从表3可以看出,速度对高程的内符合性精度基本没有影响(从高程的标准差和最大差异量来看),对平面的影响还是比较显著的。2分钟、4分钟的数据达到仪器标称的内符合性精度(平面标准差0.25 m,高程标准差0.1m),8分钟、12分钟的数据仅有ADM-90有一组数据达到仪器的标称的内符合性精度,可以基本得出速度越快(即时间越短),内符合性的概率越大。将以上数据按照1 m采用间隔输出数据,得到其外符合性精度,具体精度统计如表4所示。
从表4、图5、图6可以看出,速度越快,其外符合性精度越好,其结果在仪器标称精度范围内,速度越慢精度越差,虽然ADM-90有一组8分钟数据内符合性精度满足限差,但是其外符合性精度较差(平面标准差0.333 m、平面最大偏差1.08 7 m超出仪器限差);综合以上多组数据可以得出,速度越快,内符合性概率越大,外符合性精度达到标称精度,但速度过快,仪器在管道中的振动加剧,同样会影响惯性定位仪的精度;速度低于0.5 m/s,仪器数据会有异常,内符合性精度的置信度降低,外符合精度超限;速度大于0.5 m/s,内符合精度满足要求的情况,其内外符合精度在标称精度范围内;同时可以发现DR-HDD-4.2数据质量明显好ADM-90(限制300 m),这说明仪器本身的关键部件的精度对其内外符合精度还是有较大的影响。这在平时项目实施过程中也已经得到验证,在此不展开。
3 结 论
本文通过一系列的实验,从里程仪的误差和惯性定位系统运动速度两方面详细分析对REDUCT惯性定位系统的精度影响,为今后惯性定位系统在管线中应用(尤其非开挖长输管线)提供宝贵经验,为提高惯性定位系统测量精度理清了思路。
通过实验得出如下结论:(1)轮组的精度对管道长度有直接影响,根据轮组的大小不同,轮组直径与标准直径每差1 mm,每100 m影响管道长度1~2 m,建议将轮组的直径与标准直径值误差控制在0.5 mm之内;(2)轮组直径对惯性定位仪的内符合精度基本没有影响,对平面曲线较小的管道的平面精度影响较小,但对高程的影响是直接的,其影响程度随管道的埋度和长度呈比例放大;(3)排除轮组在管道内空转或者打滑的情况,轮组直径小于标准值时,其修正比为负数,反之为正数;(4)惯性定位仪在管道中的运动速度越快,其内符合性精度和外符合精度均越高(仪器限定最大速度范围内),运动速度慢(小于0.5 m/s),内符合精度符合的概率与置信度均降低,即便内符合性精度符合标准,其外符合性精度也较差,建议惯性定位仪在管道中的运行速度不低于0.5 m/s,最好控制在0.7~1.5 m/s之间。
目前地下管线三维轨迹惯性定位系统均是基于约束两端管口坐标的方式,缺少外符合性精度检测与评估,只能通过内符合性精度来代替外符性精度,存在一定的缺陷。随着惯导技术的发展,未来一定会有基于单点实时导航的地下管线三维轨迹定位系統出现,管线的另外一端可以作为外符合精度检核。
参考文献:
[1] 吴庐山.基于地下管线轨迹测量系统的光纤陀螺振动特性研究 [D].上海:上海工程技术大学,2015.
[2] 甄兆聪.REDUCT惯性定位系统在地下管线测量中的应用 [J].勘察科学技术,2018(2):47-50+64.
[3] 陈亮.惯性陀螺定位技术与可视化验管工艺在管线探测中的应用 [J].中国煤炭地质,2017,29(7):75-79.
作者简介:孙冬进(1979.07-),男,汉族,江苏泰州人,本科,毕业于江苏海洋大学(淮海工学院),工程师,注册测绘师,研究方向:工程测量。