小型关节式主从机械手弹簧平衡技术研究
2020-07-25邹树良胡国辉王路森沈琛林
邹树良 胡国辉, 王路森 沈琛林
1.南华大学,中国·湖南 衡阳 421001
2.中国核电工程有限公司,中国·北京 100840
从事核科学研究及生产的实验室及工厂对放射性物质进行操作均离不开核用机械手,其主要功能是将操作人员与被操作对象隔开,在保证操作人员及操作环境安全的前提下对放射性物质进行操作。机械手平衡系统的优劣直接影响操作的体感和使用效果。论文利用机械手的数字样机,分析手臂的运动状态,得出运动过程中重力矩随手臂摆动的函数关系,绘制重力矩-摆角曲线;分析恒力弹簧平衡系统平衡力矩随手臂摆动的函数关系,绘制弹簧力矩-摆角曲线;对比曲线、并优化平衡结构。
小型关节主从机械手;弹簧平衡;数字样机;恒力弹簧
1 引言
随着中国经济的持续发展,核能作为安全、清洁能源在中国能源战略中地位日益突出,在保证安全的前提下,中国核电机组按照国家规划合理增加[1]。为提高核燃料利用率,中国核工业采用核燃料闭式循环路线[2]。伴随反应堆中核燃料燃耗的加深,核燃料裂变将不能维持核电站发电功率,这些未燃尽的核燃料称为乏燃料[3]。乏燃料后处理是闭式循环中不可缺少的一个环节。
机械手是核工业后处理领域重要的远距离操作和维修工具。机械手的平衡系统是其重要组成部分,其作用是尽可能平衡掉机械手因自重产生的阻力矩以及传动系统的摩擦力矩,使得机械手在正常操作过程中,操作人员只需克服被操作物产生的负载,从而感受到的为真实的操作力。平衡效果的好坏直接影响操作的体感,好的平衡系统能够降低操作人员的操作强度,提高操作的准确性。机械手的平衡计算是机械手设计的难点之一。
小型关节主从机械手(以下简称:小型手)可应用于后处理厂、放化实验室、同位素生产等领域的防护工作箱上,属于关节式主从机械手,主要由主动上臂、主动前臂、穿墙管、从动上臂、从动前臂、平衡系统等组成。相比热室用关节机械手而言,小型手同样具有7 个独立自由度,区别在于小型手外形尺寸小、结构紧凑,安装高度低。基于这些特点限制其不可采用传统的重力平衡方式,为此采用新型的恒力弹簧平衡系统。
2 运动状态分析及力学模型建立
机械手运动为主从运动形式,主、从端为镜像结构,主动端的运动通过传动系统在从动端实现运动的复现。即主动前臂与从动前臂同前同后,主动上臂与从动上臂同上同下,从动手臂相对旋转中心O’的力矩通过传动系统传递到旋转中心O,其力矩大小相等,方向相反。
小型手运动过程中,主动前臂与从动前臂运动状态为同前同后,主动前臂相对旋转中心O 的重力矩变化趋势与从动前臂相对旋转中心O’的重力矩变化趋势始终相反。因主、从端为镜像结构,主动前臂与从动前臂质量相似、重心距离各自旋转中心距离相近,为简化计算,取从动前臂的重量,重心距离旋转中心的距离与主动前臂相同,主从运动时,主、从动前臂的合力矩不变。因此,机械手的复杂运动可以简化为主、从动上臂带动主、从动前臂始终竖直状态的上下摆动运动。基于此,建立小型手运动状态力学模型,小型手的运动示意图和力学模型图如图1所示。
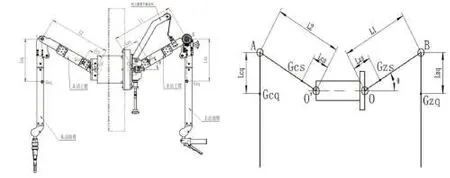
图1 小型手运动示意图及力学模型图
3 弹簧平衡特性分析
3.1 重力矩运动特性分析
机械手在水平空载状态下,重力矩达到最大值。利用力的平移原理,将从动前臂、主动前臂的作用效果平移到A、B点;主动端对O 点取矩,从动端对O’点取矩。从动端与主动端为主从运动,通过交叉的链条传动,即O’的力矩在O点的作用效果为一个大小与O’点力矩相等,方向与O’点力矩相反的力矩,恒力弹簧平衡系统提供相反的平衡力矩。
将所有力和力矩平移到O 点进行合成,小型手摆臂平衡条件为:

其中,G 是手臂重力对O 点合力;N 是O 点提供的支持 力;M 是手臂重力对O 点合力矩;Mi是各手臂重力对O 点分力矩;Mt 是弹簧对O 点力矩。
主动上臂重力对O 点分力矩:Mzs= Gzs×Lzs×cosθ
主、从动前臂重力对O 点分力矩:

从动上臂重力对O 点分力矩:

手臂重力对O 点合力矩M:

3.2 弹簧力矩特性分析
将恒力弹簧平衡系统转化为力学模型,进行受力分析,如图2所示。以O 点位坐标原点,O 点坐标为(0,0),A点坐标为(b,a),M 点坐标为(R cosθ,R sinθ),由三角函数关系可得α、β 值,即可得出γ 值,弹簧对O 点力矩Mt=Ft×R×cosγ。
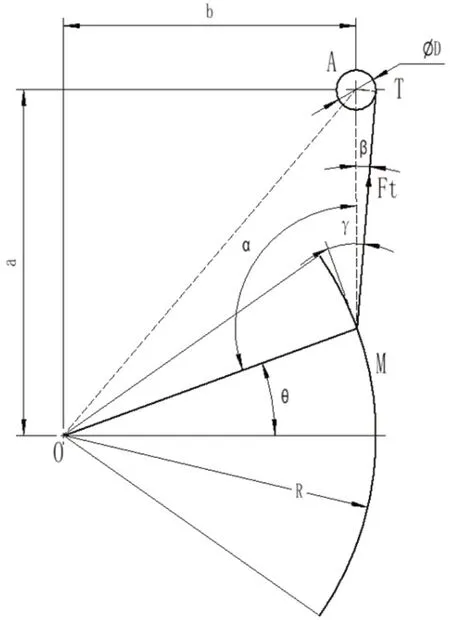
图2 恒力弹簧平衡系统力学模型
4 实例分析
论文以防护厚度为100mm 的小型手为例计算手臂重力对O 点合力矩M:
由重力矩随手臂摆动的函数关系,绘制出重力矩-摆角曲线,如图3所示。
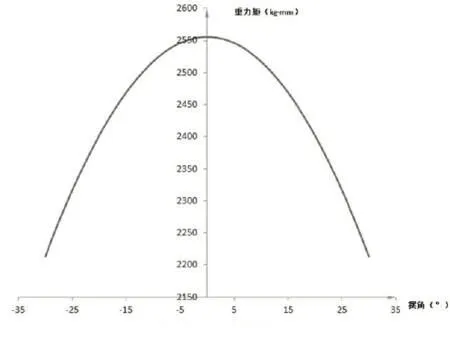
图3 重力矩-摆角曲线
恒力弹簧平衡系统需要达到的理想预期效果为完全平衡,完全平衡条件为任意位置 Mt = M,这一条件需要使得弹簧力矩变化趋势与重力矩相同,据分析结果可知,重力矩在小型手手臂水平状态时达到最大值,这需要恒力弹簧平衡系统提供的弹簧力矩在此状态同时达到最大值,即(b+)=R=Lt,弹簧力矩Mt= Ft×R= M,可得Ft。
查阅恒力弹簧标准产品样本,8kg 产品与需求最相近,对应的恒力弹簧直径D 为40mm,b=Lt-0.5D。取符合小型手结构尺寸(200 ≤a ≤350),且有代表性理的参数a 值200、250、300、350,得到以下曲线如图4所示。
分析两曲线的位置关系可知,在小型手摆臂过程中,手臂向下摆动时,弹簧力矩大于重力矩,手臂自然状态时,会自动上摆,当上摆至两曲线交点对应的角度时,手臂保持 平衡;手臂向上摆动越过平衡角度时,弹簧力矩小于重力矩,手臂自然状态时,会自动下摆,当上摆至两曲线交点对应的角度时,手臂保持平衡;平衡点位于水平位置偏上的一个小角度处,符合机械手平衡点的设置要求。

图4 弹簧力矩、重力矩-摆角曲线
5 结论
论文重点针对小型手弹簧平衡技术进行研究,提供恒力弹簧平衡系统方案,该系统能基本实现机械手任意位置的平衡,符合机械手平衡点的设置要求。
