无人机正射影像辅助无人船测深作业方法探讨
2020-07-21聂仁奇
栾 天,聂仁奇
(1.青岛市勘察测绘研究院,山东 青岛266000;2.青岛市西海岸基础地理信息中心有限公司,山东 青岛266032;3.青岛市海陆地理信息集成与应用重点实验室,山东 青岛266032)
近年来,搭载单波束测深仪的无人船被越来越广泛地应用于近海与内水的水深测量工作中,相较于传统测量船测深,无人船具有操作简便、吃水浅、机动性高等优点,能够大大降低作业成本和劳动强度[1],尤其在浅水区和小型独立水域作业相较于传统测量船具有明显优势[2],结合RTK三维定位技术与无验潮测深模式的推广[3-4],无人船测深技术也日益成熟。对于无人船测深的实际应用,国内学者进行了大量的研究与实践[5-7]。在测区面积较大且存在岸线边界、出露浅滩、礁石、渔网区、水上设施等障碍物的复杂水域环境下,无人船测深系统作业模式受到限制,当操控者与无人船相距过远或无人船不在操控者视线范围内时,操控者难以判断无人船与周边障碍物的相对位置关系,会导致测绘工作难以完成。本研究提出了一种利用无人机正射影像辅助无人船测深的方法,采用无人机快速采集并拼接完成正射影像,以正射影像作为底图划定测绘边界及水上障碍物范围并据此规划设计无人船自动航行路线,并开展了应用实践,证明了该方法能有效提高无人船测深作业效率并保障无人船的作业安全。
1 无人船测深系统
无人船测深系统由岸基控制系统与测深船两部分组成[8]。岸基控制系统一般由通信基站、遥控器以及导航测深所需要的笔记本电脑组成(图1),若采用单基站RTK方式定位,则岸基还需增加RTK基站等辅助设施。测深船集成了主控系统、GPS、罗盘、测深仪、电源、推进部件以及用于辅助航行的摄像头、避障雷达等。

图1 无人船测深系统Fig.1 Schematic diagra m of the un manned ship sounding system
无人船测深作业模式包括自动航行和手动遥控两种:自动航行是无人船在大、中型水域作业时的主要模式,通过DXF格式坐标文件或卫星影像图中划定测区,根据测区范围在导航软件中规划自动航行路线(图2),按照设计航线自动进行航行测量;手动遥控主要用于无需布设测线的小型水域和作为自动航行未到达的周边不规则区域的补充测绘手段,在实际工作中一般需2种方式结合使用。
无人船的遥控人员无需登船进行导航,大大降低了人的劳动强度和安全风险。在复杂水域中,传统测量船导航人员可根据岸线、水上水下障碍物与船的相对位置关系随时修正航行线路,而无人船虽然配备了卫星影像图作为工作底图来辅助测绘,但由于卫星影像图中水位与实际存在差异,且更新慢、分辨率低,常常无法满足复杂水域环境的测区划定和测线布设需求。
实际操作中需要采用手动遥控模式,圈定测区岸线边界和水中障碍物范围来解决上述问题,导致操控者需跟随无人船移动,不仅增大了工作量,当岸区条件恶劣时还增加了作业安全风险。对于相对靠近岸边的出露浅滩、礁石等水上障碍物能够粗略圈定,而远离岸边的水上障碍物则无法进行测绘。

图2 测区划定与测线布设Fig.2 Delineation of the surveying area and t he layout of the sur veying lines
2 无人机正射影像辅助无人船测深
2.1 无人机正射影像获取
无人机技术因其灵活、快速且不受地形、环境等条件制约的特点,被广泛应用于大比例尺测绘中,且均取得了较好的成果[9]。利用无人机航空摄影获取的正射影像替代卫星影像辅助无人船测深,可以有效地解决复杂水域无人船测深的测线布设问题,其优点在于现势性与高分辨率:在无人船测量开始前的踏勘和控制布设阶段根据水域复杂程度进行无人机的航空摄影。由于正射影像仅用于自动航行线路设计,其平面精度要求较低,因此对像控点数量、像控点布设方法、无人机航高、航向重叠范围和天气等要求也相对较低,目前国内能够对无人机正射影像进行处理的软件较多,精度及可靠性也均可保证[10]。
2.2 自动航行线路设计
经像控点纠正和拼接后生成的正射影像成果即可作为自动航行线路设计的工作底图,辅助进行岸线及水上障碍物范围线的圈定。范围线圈定应综合考虑定位精度、船体大小、航速、转弯半径、流速等因素以确保航行安全。在利用影像圈定的范围线内进行自动航行线路设计,对软件生成的自动航行线路进行人工干预调整以提高作业效率和安全系数。
2.3 水位控制
水位的控制是此方法得以实现的重要保证,无人船测深作业水位不应低于正射影像获取水位。对于水位受潮汐影响巨大的海上作业区,应在正射影像获取时记录水位,在水位不低于正射影像拍摄水位时进行作业,或根据水位适当缩小测量范围,以保证作业安全。在水位短期内处于稳定的水域,如河流、水库、湖泊等影响较小。
3 实践应用
借助2019年开展的山东省大型水库1∶2 000水下及近岸地形测量项目,开展了无人机正射影像辅助无人船测深技术在水库水下地形测量和近岸地形测量的应用实践。实践位置选在位于山东费县的许家崖水库,水库面积约为29.36 k m2,水库中存在大量被堤坝、桥梁等分割的小型独立水域,常规测量船难以进入,极为适合无人船进行测深作业。位于水库中心位置的一处大面积浅滩为本次实验测区。
3.1 正射影像采集
在许家崖水库使用乌克兰进口AEROS-912动力三角翼飞机执行航空摄影任务,使用RIGEL VUX-1机载激光雷达系统执行航摄,集成索尼A7R2相机,作业飞行高度可达1 000 m、绝对高程精度可达5 c m、多次回波、点频可达600 k Hz、满足大比例尺测图要求,最终获取了地面分辨率0.07 m正射影像。
3.2 无人船作业
项目采用了云洲SE40与华微5号两种类型的无人船进行试验作业,两艘无人船长度均为1.6 m,搭载电池及配件后总重量不超过40 kg,船体及测深仪吃水在0.2 m以内,均为轻便灵活、运输方便的小型测量无人船,2名作业人员可以较为轻松地完成全部工作。在风浪较小的水域,无人船实地自动航行轨迹线与设计测线间距误差可达10~20 c m以内,是传统测量船难以达到的。
根据卫星影像图(图3)显示,距离许家崖水库岸边约300 m有一处约215 m×60 m的浅滩,在高水位时该浅滩可完全淹没在水中,在低水位时露出水面,遥控人员无法判断其与无人船相对位置,本研究使用项目已获取的地面分辨率0.07 m正射影像尝试解决这一问题。

图3 不同时期许家崖水库卫星影像Fig.3 Satellite i mages of the Xujiaya Reser voir in different periods
图4为本次所获取的正射影像,水涯线、水下浅滩礁石均较为清晰,出露浅滩南侧存在人工养殖池,养殖池延伸至岸边,此区域较难判定是否存在行船风险,在圈定作业范围线时先将此区域扣除,同时作业范围线尽量避开水下浅滩、水下礁石,经图上测量,作业范围线距离水涯线均在10~20 m。将划定好的作业范围线导入随机软件,按照20 m间距进行测线布设,对生成的自动航行线路进行规划设计(图5),优化航行路线并减少航行风险,其中在最南侧节点38-39处,无人船将自西向东穿越人工养殖池,此区域自动航行存在风险,在实际操作时切换为手动模式进行穿越,在抵达39节点后切换回自动模式完成剩余测线,完成全部测绘工作后返回Ho me点。无人船外业数据采集前利用GPS-RTK方式测定水面高程,确定实时水位不低于正射影像采集时水位。
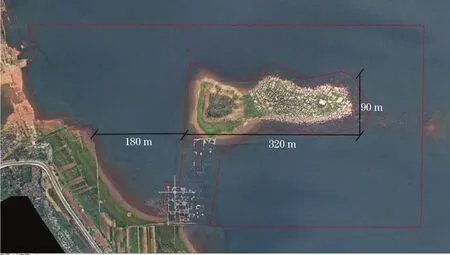
图4 2019-07许家崖水库正射影像Fig.4 Orthophoto of the Xujiaya Reservoir in July 2019
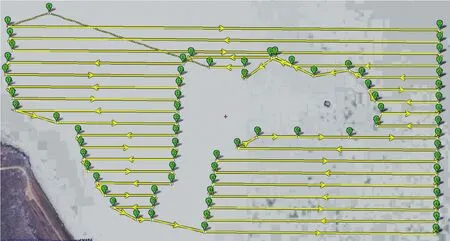
图5 无人船自动航行线路Fig.5 Auto matic navigation route of the un manned ship
图6为本次无人船所采集数据与机载LIDAR获取的水上点云数据拼接整饰后生成的数字线划图,水下高程数据与水涯线间距在20~30 m,基本能够达到1∶2 000比例尺水下地形图图上1 c m的要求,通过无人船采集数据与传统测量船覆盖区域检核比对,测量误差满足精度要求。

图6 许家崖水库数字线划Fig.6 Digital line drawing of the Xujiaya Reservoir
4 结 论
本研究提出了一种利用无人机正射影像辅助无人船测深的海天一体化作业方法,并对许家崖水库中心区域进行了测绘实践应用,实践结果表明,该方法能够最大限度完成复杂水域的测绘任务并保障无人船的安全。研究得出以下结论:
1)目前无人船大多采用卫星影像图作为自动航行线路设计的工作底图,但由于卫星影像图更新慢、分辨率低,且水位与实际存在差异,工作中常常无法满足复杂水域环境测深作业需求,利用无人机正射影像作为无人船自动航行线路设计的工作底图能够解决以上问题。
2)利用高地面分辨率无人机正射影像结合对水位的控制能够保证无人船在复杂水域中获取的高程数据达到1∶2 000比例尺水下地形图的测点间距要求。
3)采用此方法设计的无人船自动航行路线能够有效避开复杂水域中的水上、水下障碍物,保障无人船的航行安全。同时自动航行路线设计完全在内业工作中实现,节约了外业现场手动航行圈定测绘边界及水上障碍物范围的时间,提高了作业效率。
4)无人机与无人船均具有轻便灵活、自动化、高效率的特点,各自在测绘领域的应用已非常普遍,将二者结合使用,能够实现水上水下一体化测绘,是“无人时代”海洋测绘发展的方向之一。
