电动治疗床的设计与仿真分析*
2020-07-20赵展
赵展
(上海理工大学 医疗器械与食品学院,上海 200093)
1 引 言
据统计,我国现有60岁以上的老年人超过两亿,其中约2/3的老年人有一种或一种以上的慢性病。如何提高老年人的生活质量,解决日益严重的人口老龄化对社会造成的诸多负面影响,特别是满足各种慢性病所引起的医疗保健等需求,是现今社会的研究热点之一[1-4]。中医推拿具有消除疲劳、促循环、加速代谢、增强关节活动性、调节人体免疫系统等作用,其适应症多达500余种,是治疗老年人腰腿疼痛等慢性疾病的有效方法[5-9]。推拿治疗床作为常见的推拿设备,其功能越来越多样化、电子化。国外进口电动治疗床一般结构复杂,价格高,不适合大规模推广使用。随着经济发展和人口老龄化问题的需求,国内对治疗床进行了诸多改进设计,但因结构设计不合理,仍需不断完善。总之,包括治疗床在内的我国医疗器械行业状况虽然得到了很大改善,但制造水平仍较低,特别是销售规模仅占全球5.4%左右[10-11]。本研究设计了一款柔软舒适,让患者身心放松,能减少治疗师体能消耗、降低工作强度,从而确保治疗师长时间工作的治疗效果和工作效率的较轻量化电动治疗床。
2 基于虚拟样机技术的结构设计
2.1 设计要求
由于中医推拿的特殊性,对治疗床的功能、外观、性能等有诸多要求。对关键设计要求总结如下。
床面尺寸:设计时需要考虑患者的身高、体宽,及治疗师的操作方便,经查询并参照GB10000-88《中国成年人人体尺寸》标准,对床面进行设计,选用尺寸为200×55 cm。
承重要求:参照GB/T10357.6-2013《家具力学性能试验 第6部分:单层床强度和耐久性》,结合治疗师手法和施力方向,治疗床需至少承受220 kg载荷仍能正常工作而不被破坏,并同时考虑结构变形情况。
床高要求:考虑到患者在床上不同姿态时,方便治疗师操作使用,减少治疗师侧身弯腰或推拿反向压力对手部和腕部损伤的风险,采用床高可调设计,且使用电机驱动,节省人力。需考虑床体升高速度、电控方式、动力源、防水、防电、电源线拉扯造成电气内部损伤等问题。
另外还需考虑治疗床的舒适性,外观不应有锐变、尖角等,结构稳固,在地面上不易滑动,消毒使用方便,噪声小、重量轻、方便移动等。
2.2 结构设计与三维建模
CATIA是法国达索公司开发的一款集CAD/CAE/CAM一体化的三维设计软件,其模块化的混合建模技术具有全相关性[12-13]。本研究应用CATIA三维软件对电动治疗床进行了结构建模设计,所设计的电动治疗床主要包括底架、床板、传动驱动机构三大部分,见图1。
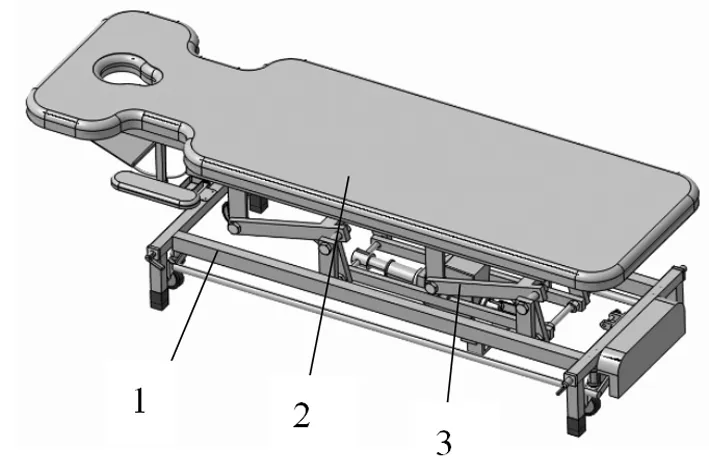
注:1为底架机构,2为床板机构,3为传动驱动机构。图1 治疗床总体效果图Fig.1 Overall effect of massage bed
2.2.1底架机构 考虑到强度和轻质,选用方管为主,通过焊接及螺纹连接的方式对底架机构进行设计,见图2。
置物台是针对痰多、流涕的患者设计的,用于放置一次性塑料盒、生活垃圾盘等,也可直接放置杂物或重要物品。合理设计物品的放置区,能有效避免污染医院环境,防止感染。治疗床升降可用线控开关手控操作,也可用脚控杆控制,脚控杆为可选床高控制方式,治疗师可通过抬脚或脚踩来驱动脚控杆,控制治疗床升降。两个选择能改善治疗师的使用方式,提高工作效率,增强便利性。另外,底架机构的前后两端各设有一套升降轮机构,用脚踩即可降下轮子,轻松移动治疗床。
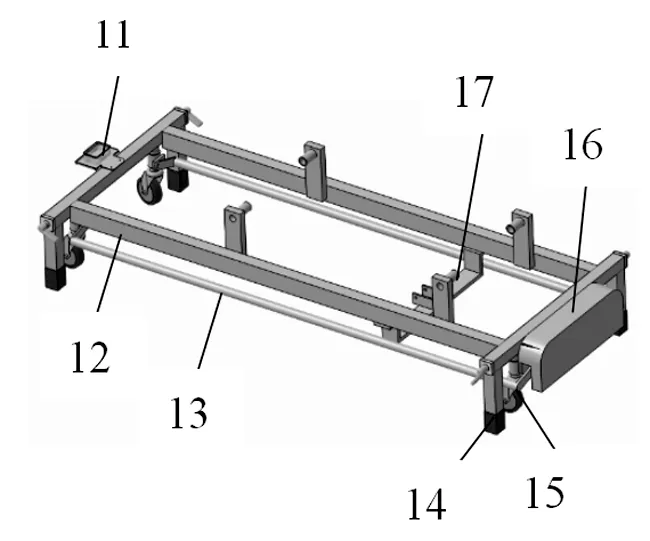
注:11为患者置物台及一次性塑料盒,12为主框架,13为脚控杆,14为防滑腿套,15为升降轮机构,16为电气控制箱,17为电推杆底座。
2.2.2床板机构 床板机构包含床板架及床板,见图3。
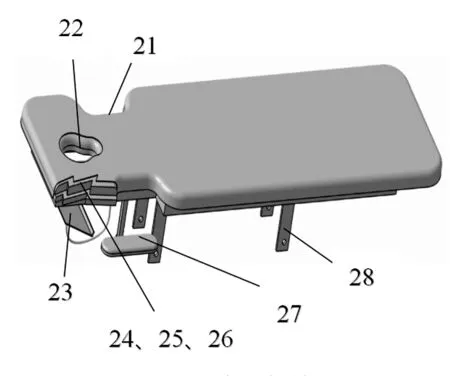
注:21为臂部凹,22为匙形孔,23为可调平板座,24-26依次为床板皮革、床板海绵、床板木板,27为手臂托,28为床板架。
床板架采用方管焊接,以增强床板的强度和刚度,使其结实、稳固、耐用,给治疗提供强有力支撑。床板使用木板、海绵加皮革的三层结构方式,保证舒适性。距床头大概40 cm处设有匙形孔,改进了传统长圆孔的设计,使患者眼鼻口悬空。不仅可用于呼吸及观察,也可用于固定头部,避免长时间治疗造成的呼吸困难、窒息感。考虑不同年龄段的患者需求,特设随床板一起升降的可调式平板电脑座,用于放置图书、手机或平板电脑等。可调式设计以适合不同患者的视力要求,方便患者边浏览边治疗,缓解紧张情绪,降低长时间治疗的厌倦乏味感。床板上切有臂部凹,与床板架上高度可调的下沉式手臂托相配合,患者可选择将肘或手放置在手臂托上,也可双手自然平放在躯干两侧。整体设计调节方便,功能实用,能改善医疗服务质量,让患者身心放松,以最佳心态接受治疗。
2.2.3传动驱动机构 采用医用电推杆作为驱动动力,推动床升高,见图4。
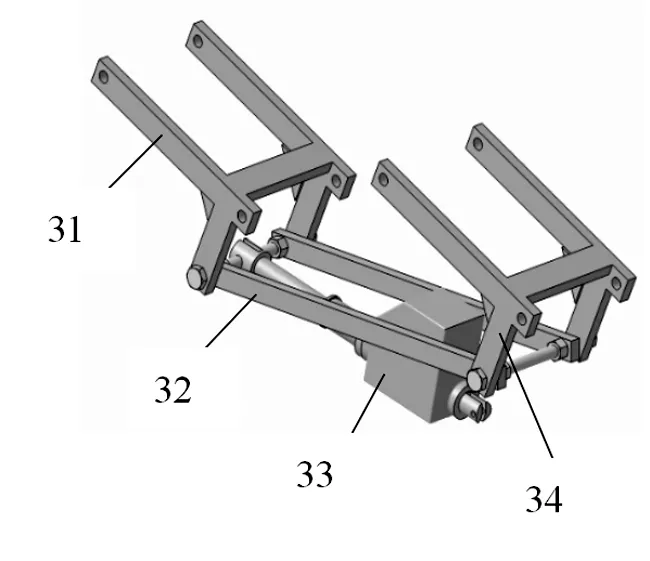
注:31为前推升架,32为连接杆,33为电推杆,34为后推升架。
传动驱动机构主要包括电推杆、前后推升架及连接前后推升架同步运动的连接杆。前后推升架完全对称,其上端与床板机构相连,中间与底架机构相连,下端通过连接杆连接,组成了上下两对平行四边形,通过电推杆推动其中一个推升架的下端即可联动所有传动机构,电推杆下端与底架机构的电推杆底座连接。考虑到无线控制器易丢失、跌落损毁,本研究电推杆采用线控开关手控操作按键来实现伸缩,完成推动床的升降动作。
2.3 虚拟装配设计
对整个样机进行虚拟装配,通过软件内测量工具测得床高约在48~1 000 mm范围内变化,可用作推拿按摩治疗用,还能作药熏、针刺、拔罐治疗,及对患者进行床边站立、床上床下转移训练等用途。选用身高人体百分位数为50%的治疗师,经CATIA仿真分析得知,床高为595 mm时该治疗师能轻松推拿施力,见图5,此高度在床高设计的范围内。
另外,应用CATIA对患者可视区域仿真分析[14],见图6。图6(a)为患者俯卧时的仿真图,图6(b)为患者的可视区域,可见视域覆盖了整个可调平板座及患者置物台的范围,设计合理。
3 机构仿真分析
3.1 机构运动简图与自由度
3.1.1机构简图 根据治疗床各构件之间连接及相对运动情况,简化成平面运动机构并绘制其运动简图,见图7。借助CATIA能更直观地展示治疗床的运动简图,动起来的简图更易理解其运动原理[15],图8(a)为CATIA绘制的运动图,图8(b)是对应生成的avi视频,可更清晰地演示机构的运动原理。

图5 治疗仿真图Fig.5 Massage simulation
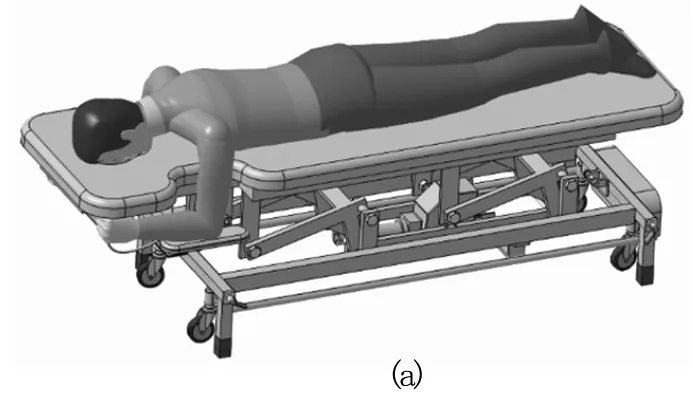
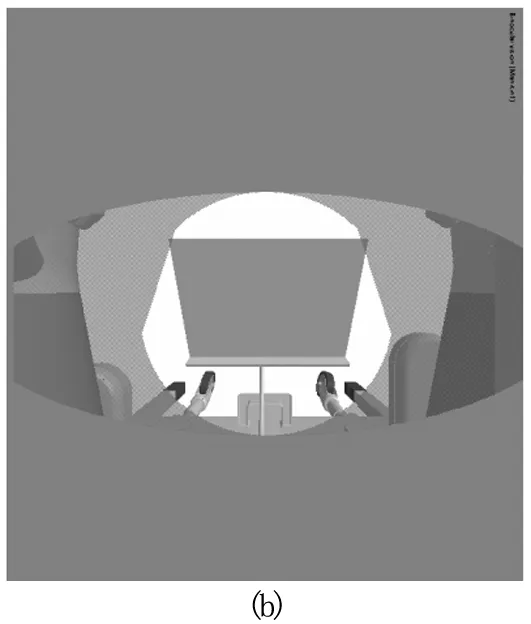
图6 患者视野分析(a).患者俯卧;(b).可视区域Fig.6 Patient vision analysis(a).prone position;(b).view area
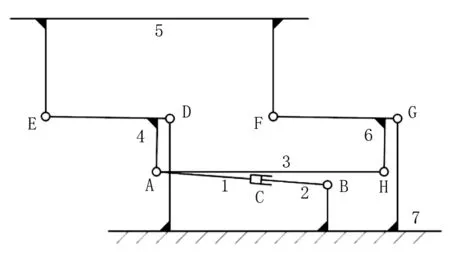
图7 机构运动简图Fig.7 Kinematic diagram
3.1.2自由度计算 机构自由度的计算公式为F=3n-2PL-PH,式中n为活动构件的数目,PL为低副的数目,PH为高副的数目。考虑复合铰链及剔除虚约束后,得到治疗床的自由度数为1,因有1个原动件电推杆,故运动能完全确定。
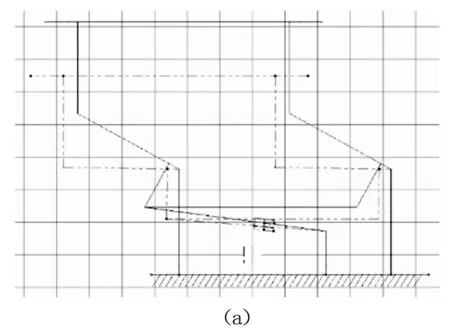
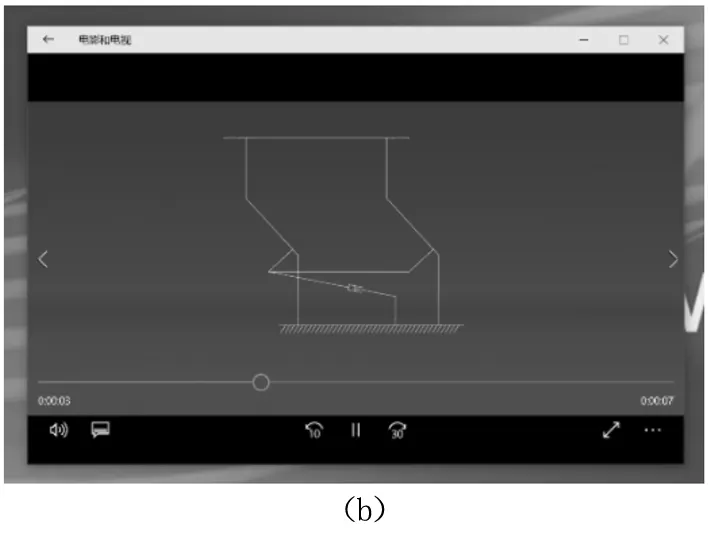
图8 草图工具绘制的机构简图(a).运动简图;(b).生成视频文件Fig.8 Kinematic diagram by sketch tools(a).kinematic diagram;(b).motion video
3.2 运动仿真
应用CATIA DMU虚拟样机技术可三维显示其运动情况,并得到相关的运动参数图,让非专业人员也能直观地了解其运动原理[16]。图9(a)是运动仿真分析结果,图9(b)为进一步得到的电推杆-床高曲线图,实际高度可能会因海绵的压缩而略有差别。
3.3 力学分析
治疗床的主框架、传动架为主要受力变形机构,为保证设计结构的有效性和安全性,需验证其结构强度和刚度。集成化的CATIA软件可实现对零件及其装配体的静态应力分析及模态分析,无需不同格式间的导出和读入操作,能及时看到修改后的分析结果,为产品设计师而非分析专家提供了一个便利且行之有效的分析系统[17]。其力学有限元分析通过设定材料、划分网格、添加约束后计算即可得到结果,关键结构的分析结果见图10。
图10(a)-(c)是对主框架、床板和传动架进行合理简化后,分析得到的划分网格图、应力及位移图。由静力学分析结果得知,前推升架受力及变形最大,特别是拐角及连接轴处,把它单独显示见图10(d),不过最大应力仍远小于材料的屈服极限,最大变形约2 mm较小,关键零部件的强度和刚度均满足要求,安全系数高,结构安全可靠。
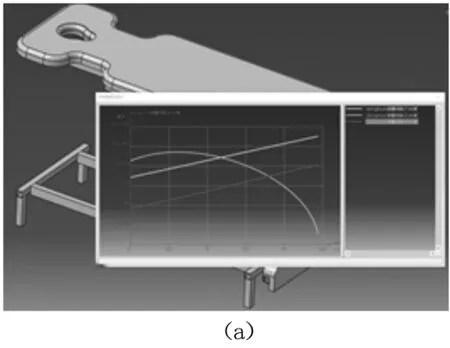
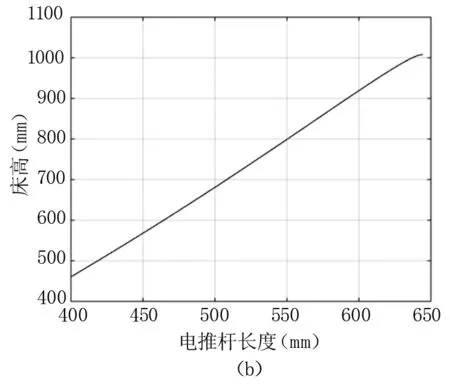
图9 运动仿真分析(a).仿真曲线;(b).电推杆-床高图Fig.9 Kinematics simulation analysis(a).simulation curves;(b).linear actuator-bed height graph
3.4 动力学分析
在不考虑自身重量和治疗师推拿力时,针对电推杆选型问题对治疗床进行受力分析,见图11。
左边前推升架4的力矩平衡方程为:
T0=(g1×LDE×cosα+T1×LDA×cosβ)/(LDA×cosγ)
(1)
右边后推升架6的力矩平衡方程为:
T1=g2×LGF×cosα/(LGH×cosβ)
(2)
考虑到前后推升架4、6同形:
LDE=LGF、LDA=LGH
(3)
又,g1=g×L2/(L1+L2),g2=g×L1/(L1+L2)
(4)
联立上述式子,最终可解得电推杆的推力T0。其中L在设计时已确定,β、γ、α可分别通过△DAH、△DAB、△DEE′平面几何关系求解得到,E′为E点在通过D点的竖线上的投影。
为了更清晰地了解电推杆在驱动床板升降时的力矩变化情况,可通过软件测距来追踪。分别选取电推杆及床板机构的力臂作为测量参数,得到两者的变化曲线图,通过比对可找到电推杆的最大推力处,从而计算校核电推杆的选型,因有其他更方便的动力学分析软件,此处不再赘述。
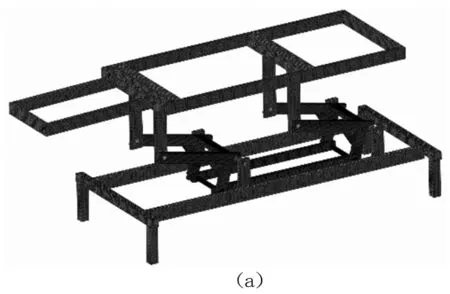
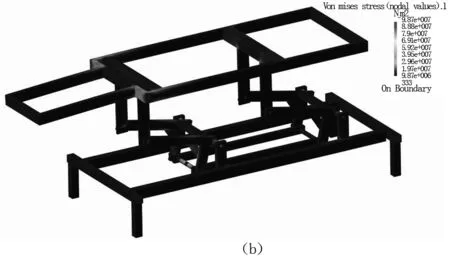
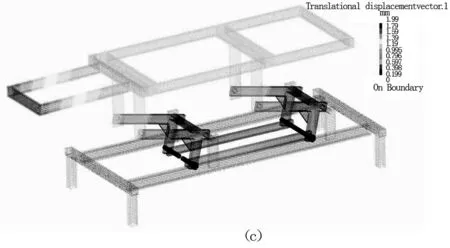
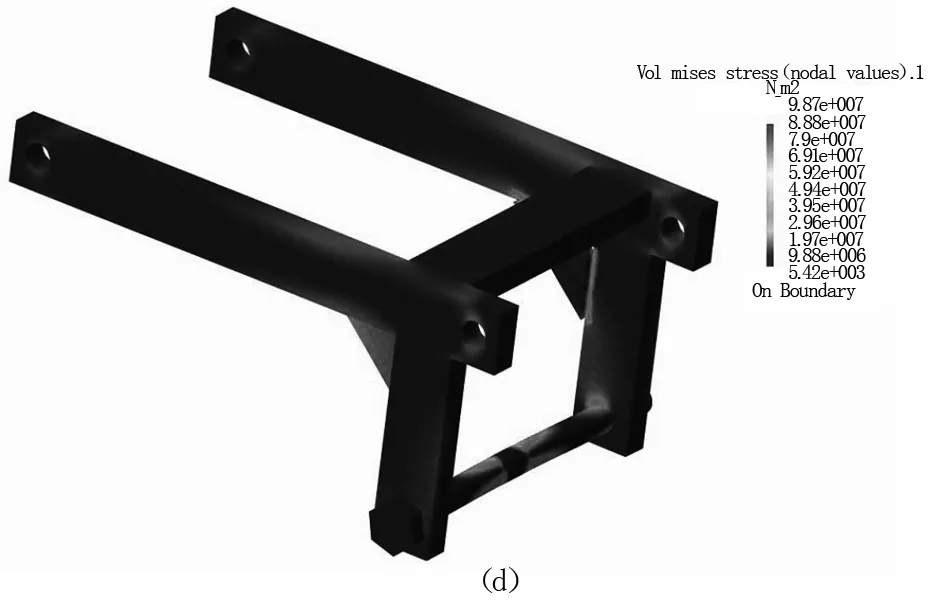
图10 力学分析(a).网格图;(b).应力图;(c).位移图;(d).前推升架的应力图Fig.10 Mechanical analysis(a). mesh;(b).mises stress;(c).displacement;(d).mises stress of front driving frame
4 结论
本研究采用虚拟样机技术对所设计的电动治疗床的关键技术点,从结构设计、力学、运动学及动力学等方面进行仿真分析研究,结果表明,其结构符合人机工程学要求,设计合理有效,能减轻治疗师的劳动强度,改善被治疗者的舒适性。采用虚拟样机技术不仅能缩短设计时间,提高设计效率,还能更直观地看到设计效果,减少失误,并为后续加工生产提供参考依据。
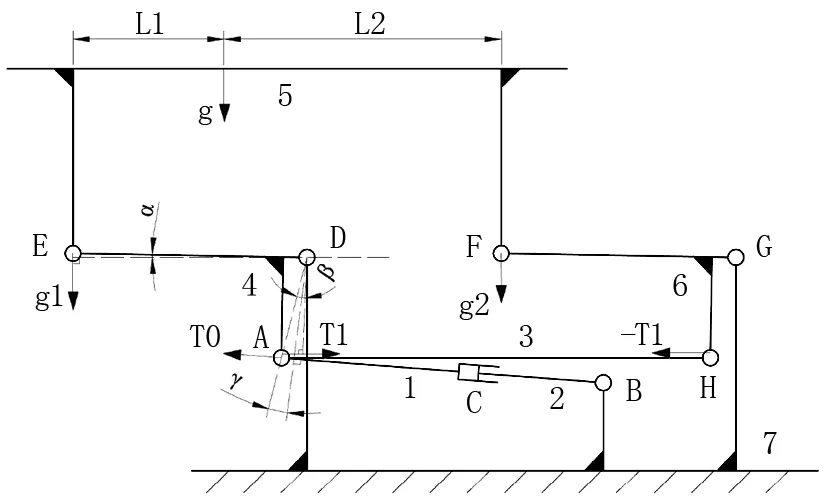
图11 受力分析图Fig.11 Force analysis diagram
