定量超声骨密度测量系统中系统延迟时间的测量研究
2020-07-20张晓斌冯帅郑驰超彭虎
张晓斌,冯帅,郑驰超,彭虎
(1.安徽医科大学第一附属医院,合肥 230022;2.合肥工业大学,合肥 230000)
1 引 言
骨质疏松症指由各种原因引起的骨矿物质成分(主要成分是钙)和骨基质(胶质)密度减少[1]、骨皮质变薄、骨小梁变细、骨的硬度和弹性下降[2],导致骨的脆性增加[3],骨折的危险性增加[4]的一种全身性骨骼疾病[5]。定期进行骨密度测定是目前早期诊断骨质疏松症[6]、防患于未然的最重要、最准确[7]、最直接也是最有价值的环节[8-9]。定量超声骨密度测量系统通过测定超声对物质密度、结构及材料的特征表现来评价骨骼的质量[10-11]。
骨超声传导速度是定量超声骨密度测量系统的主要参数指标[12],反映骨的矿物质密度[13],超声传导速度越快,骨矿物质密度越大,骨质越好。文献[14-15]详细对比了定标方法:过零点、到达第一最大波峰和阈值法,提出了改进的骨超声传导速度估计公式(含中心频率及带宽),为声速测量的标准化提供了重要的参考。然而由于定量超声系统中的系统延迟时间很难被精确测定,导致骨超声传导速度值的测量存在较大误差。
系统延迟时间是指发射信号从发射电路发出,通过换能器电声转换,发射和接收耦合装置,接收传感器,声电转换直到A/D转换为数字波形的这段延迟时间。测量系统延迟时间的方法有很多,其中最常用的、传统的方法是将收发探头的耦合装置紧密接触,然后测量从超声发射到接收的这段时间作为系统延迟时间(即图1中d=0)。但该方法存在缺陷,由于收发探头耦合装置的间距不可能完全为零,因此,测量的结果必定存在一定误差。根据研究显示,系统延迟时间的误差对最终测量结果有很大影响。本研究提出了最小二乘线性回归拟合测量法,并将其测量效果与传统直接法对比。实验证明,使用最小二乘线性回归拟合法能避免直接法测量中的系统误差,提供可靠和准确的系统延迟时间。在特定实验条件下,明显减小了骨超声传导速度的测量误差。
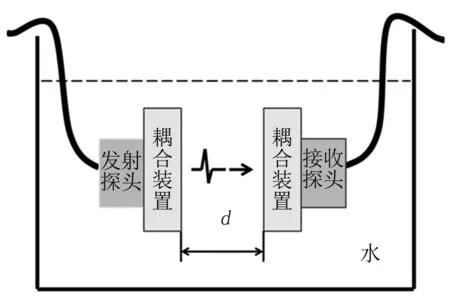
图1 定量超声系统中延迟时间测量装置Fig.1 Delay time measuring device in quantitative ultrasound system
2 方法
2.1 直接法
直接法将水槽中的收发探头直接接触,此时耦合装置之间的间距为零,即d=0,见图1。此时接收探头接收到的超声信号和发射探头发射信号之间的延迟时间即为系统延迟时间。为了降低测量误差,发射探头将多次发射信号,收发信号间历次时间间隔的平均值即为系统延迟时间,见式(1)。
(1)
其中,Tdi为第i次收发信号间延迟时间,N为发射信号次数。
在实际的骨密度测量过程中,d≠0,骨超声传导速度C与系统延迟时间Td关系见式(2):
(2)
其中,T为接收信号与发射信号之间的时间差。
由式(2)可得,速度C是Td的函数,以Td为自变量对C求导,可得:
(3)
因此,直接法测量延迟时间对骨超声传导速度的测量误差ΔC为:
(4)
结合式(2),式(4)可表示为:
(5)
由于在超声骨密度测量中,骨超声传导速度C比较大,为1 400 m/s左右,而发射探头和接收探头之间的距离d一般小于0.05 m。因此,系统延迟时间的误差ΔTd对最终测量结果的误差ΔC影响很大。为提高骨骼超声传导速度的测量精度,在骨密度测量前尽量精确地测量出系统延迟时间非常必要。
2.2 最小二乘线性回归拟合法
由于采用直接法无法消除系统延迟时间的误差ΔTd带来的测量误差,本研究提出采用最小二乘线性回归拟合法来测量系统延迟时间。将发射探头和接收探头之间的距离定为不同的值,记录每一次收发信号之间的时间差和探头间距,得到不同的(Ti,di),i=1,2,3…,其中Ti为接收信号与发射信号之间的时间差,其等于系统延迟时间与超声信号在水槽中传播时间之和。di表示发射探头和接收探头之间的距离。
接收信号与发射信号之间的时间差T与发射探头和接收探头之间的距离d存在如下关系:
T=f(d)
(6)
将式(6)在d=0处做泰勒级数展开,取前两项,可得:
T=f(0)+f′(0)×d
(7)
式(7)有着非常显著的物理意义,f(0)就是当d=0的时候系统的延迟时间,即:
T=Td+f′(0)×d
(8)
显然,f′(0)就是超声波在厚度为d的骨组织中传导速度的倒数。
由最小二乘法:
(9)
求得f′和Td以最小化误差的平方和。
求得系统延迟时间Td后,由接收信号与发射信号之间的时间差T、发射探头和接收探头之间的距离d与式(2),即可求得超声传导速度。
3 实验设计与结果分析
实验在水槽中进行,测量系统主要包括发射电路和接收电路两部分,见图2。系统由计算机进行主控,超声探头为聚焦型单振源超声传感器,中心频率为1.5 MHz,带宽80%。采用工业测温计测量水槽水温,保留三位有效数字。
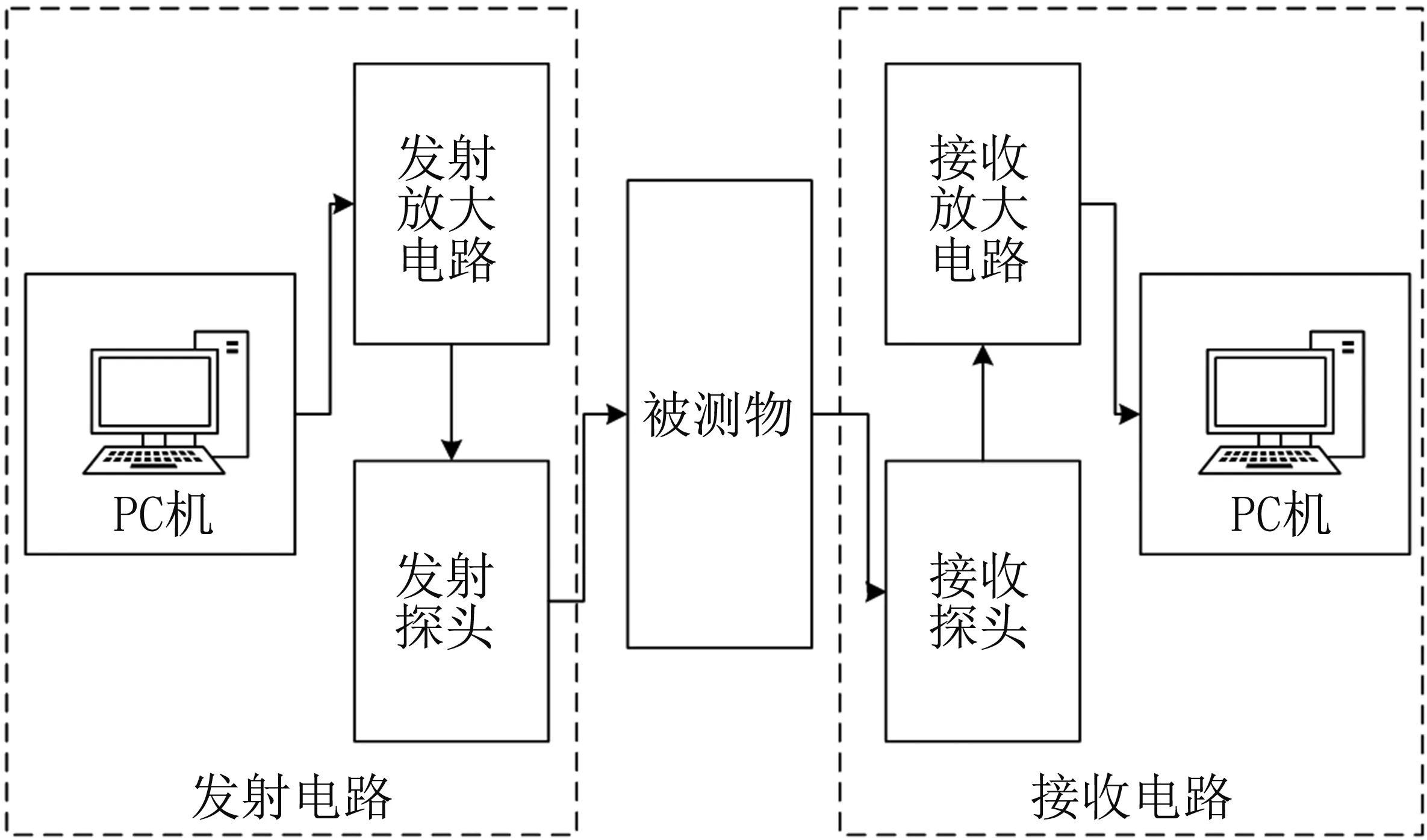
图2 系统结构Fig.2 System structure
将发射探头和接收探头之间的距离保持稳定,接收信号见图 3。
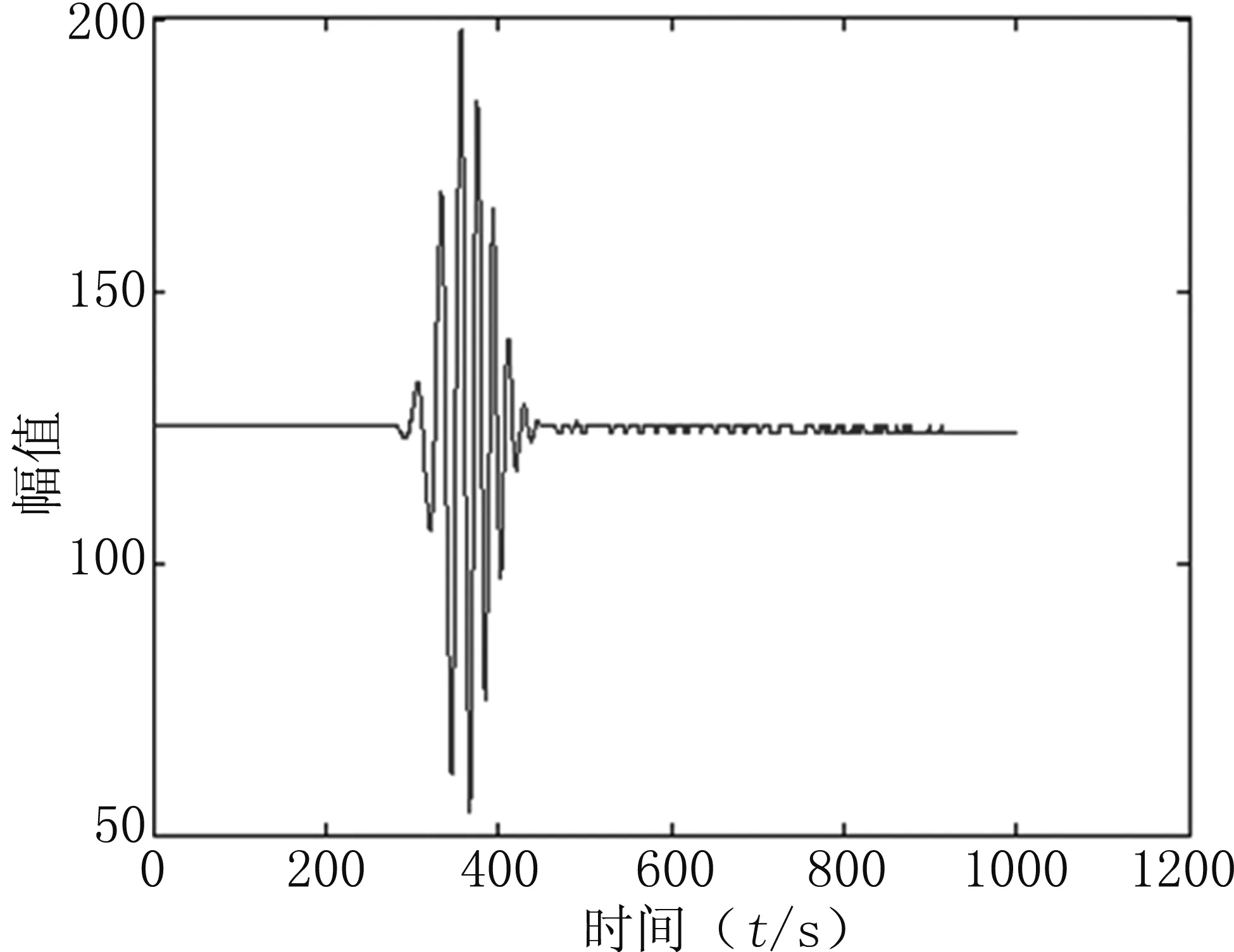
图3 接收信号Fig.3 Receiving signal
在测量过程中,接收探头的信号接收时间有两种不同定义。定义A标记接收信号的最高峰值时间作为信号接收时间。定义B标记接收信号的第一个峰值时间作为信号接收时间。为了验证方法的有效性,我们采用两种不同的定义,分别比较了回归拟合法和直接法的结果,见表1、表2。

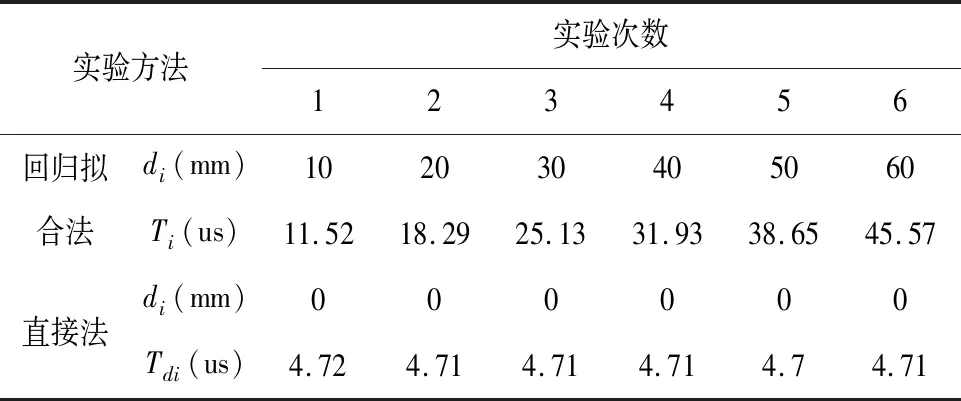
表1 采用定义A时回归拟合法和直接法的测量结果Table 1 Measurement results of regression fitting method and direct method with definition A
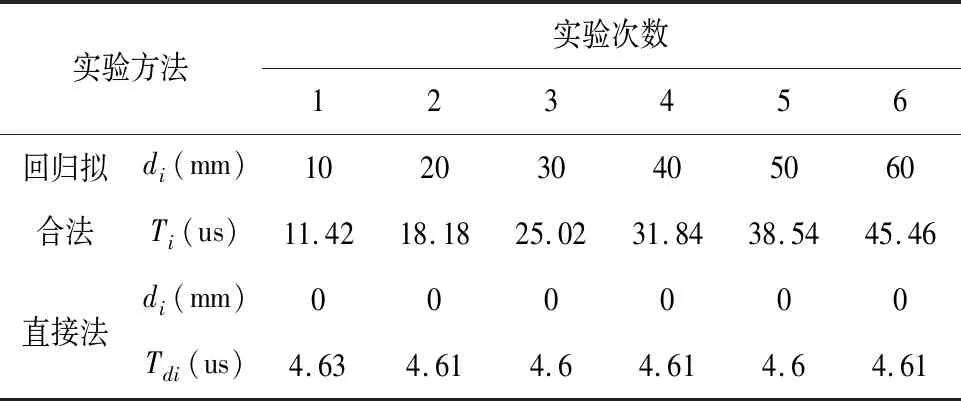
表2 采用定义B时回归拟合法和直接法的测量结果Table 2 Measurement results of regression fitting method and direct methodwith definition B
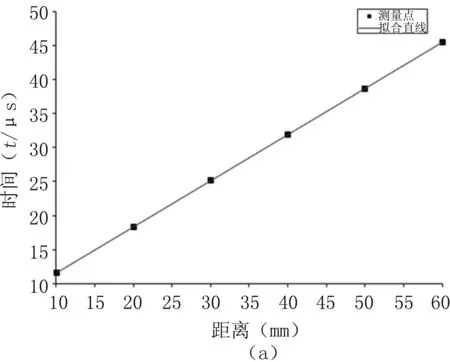
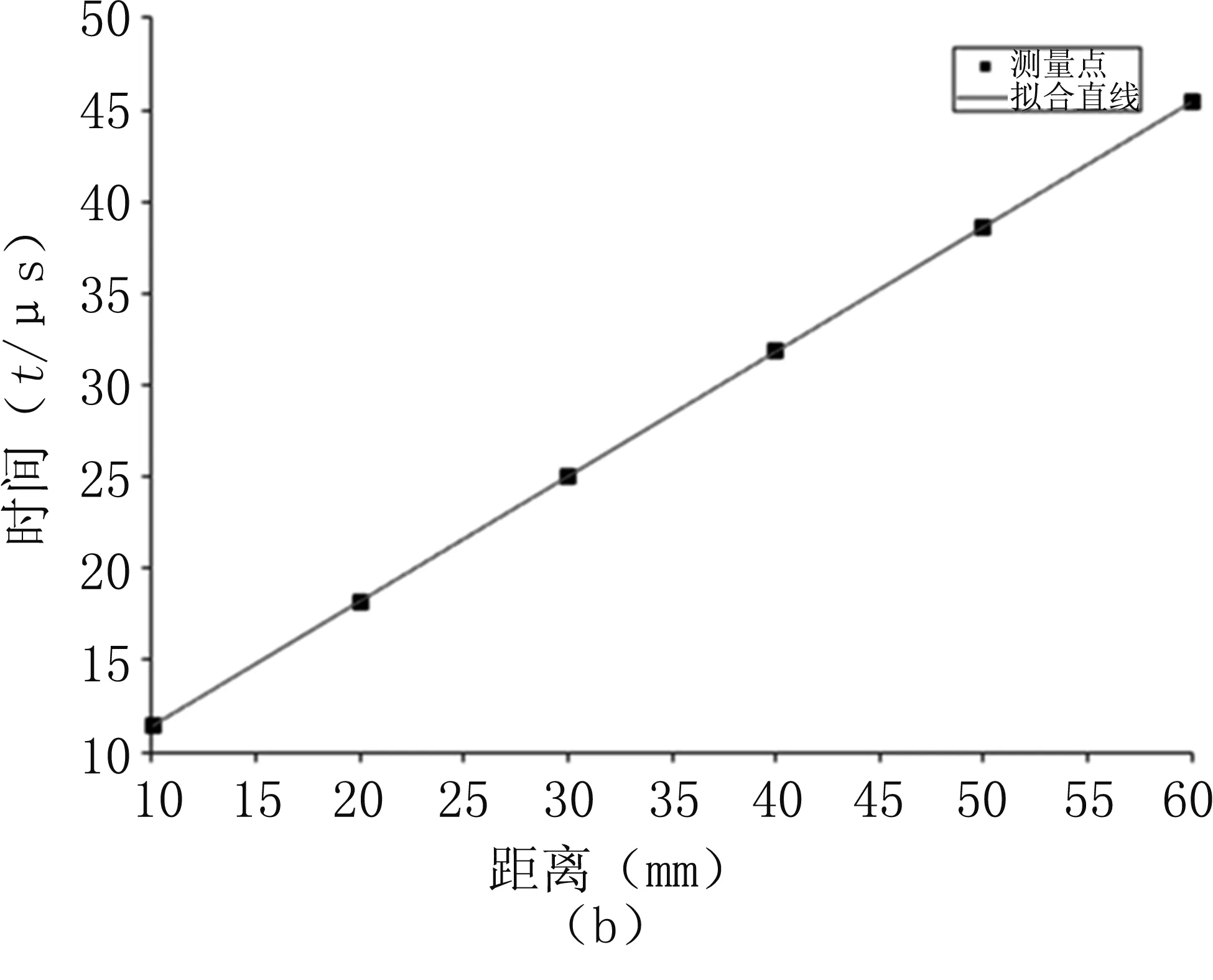
图4 回归拟合法结果(a). 定义A; (b).定义BFig. 4 Regression fitting method results(a).definition A ;(b). definition B
由式(2)可以进一步求得超声信号在水中的传导速度。
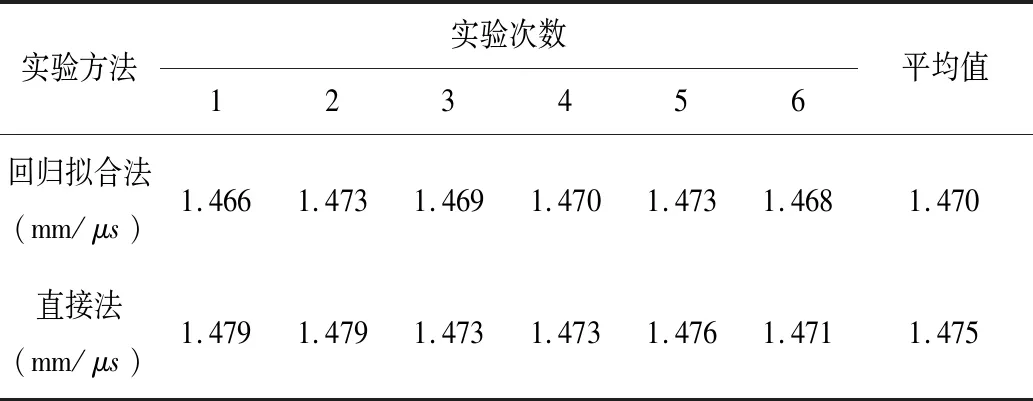
表3 采用定义A时回归拟合法和直接法得到的超声速度Table 3 SOS of regression fitting method and direct method with definition A
表4 采用定义B时回归拟合法和直接法得到的超声速度Table 4 SOS of regression fitting method and direct method with definition B
由表3、表4可知,最小二乘线性回归拟合法和直接法所得的最终结果相差较大,但是不同的定义对同一方法的影响较小。为了验证方法的有效性,我们采用超声信号在水中的传导速度作为基准进行比较,其经验值可由式(10)得出。
C=1402.34+5.0336×t-5.7951×10-2×t2+3.3164×10-4×t3-1.4526×10-6×t4+3.0449×10-9×t5(m/s)
(10)
其中,t为水槽水温(℃)。
实验时测得t≡16.4℃,由式(10)可得C=1.471 mm/μs。
由最小二乘线性回归拟合法和直接法测量得到系统延迟时间,然后由式(2)可得超声传导速度。由图5可知,在不同的定义下,直接法所得的声速值均偏离经验值较远,且明显偏大,符合偏向性误差的反随机原则。
由相对误差式(11):
σ=Δ/L×100%
(11)
可得最小二乘线性回归拟合法在定义A、B下的相对误差,σ1A=0.068%,σ1B=0.068%。同理可得直接法在定义A、B下的相对误差,σ2A=0.272%,σ2B=0.340%。由此可见,本研究方法的测量误差要远小于传统直接法。
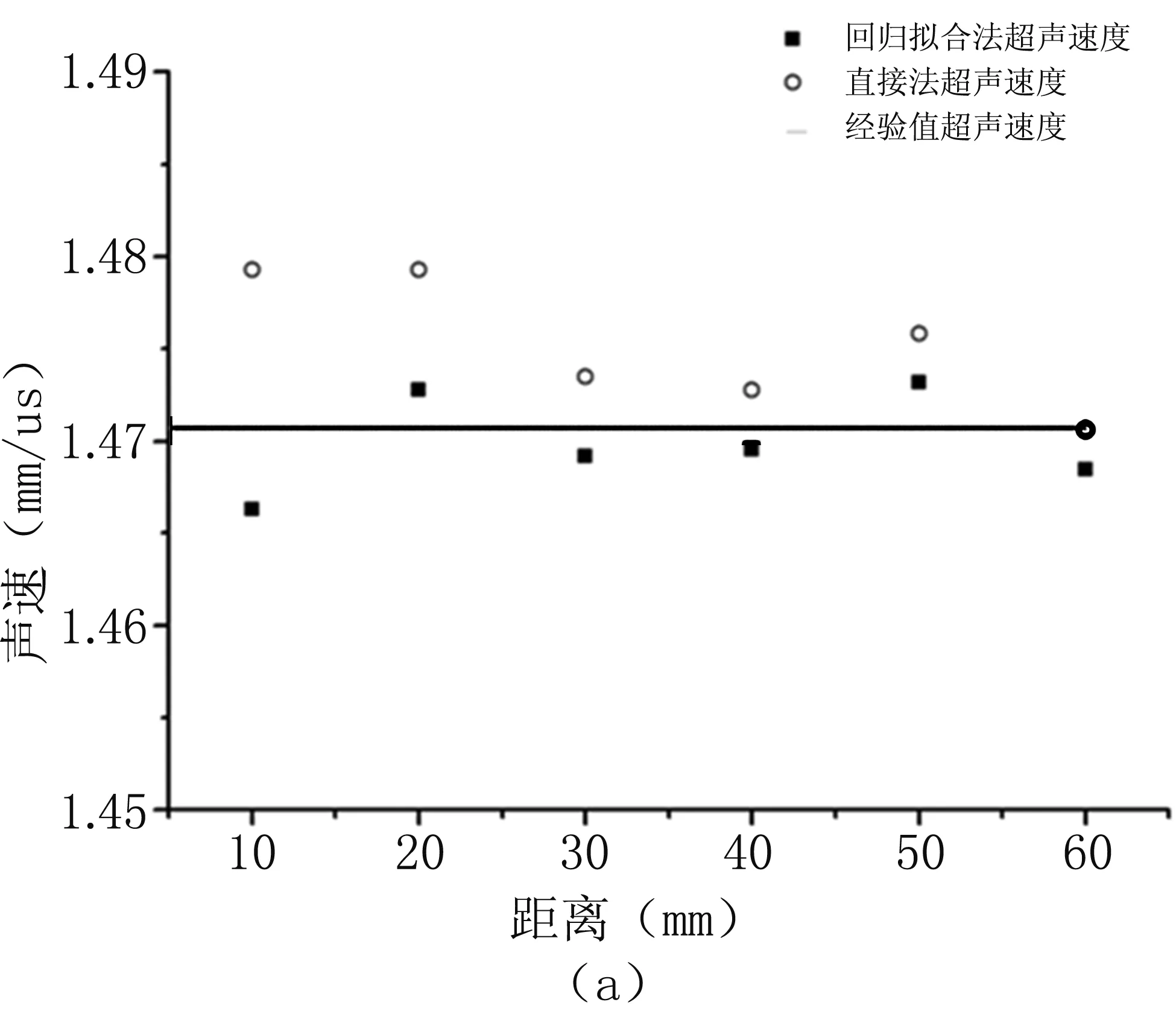
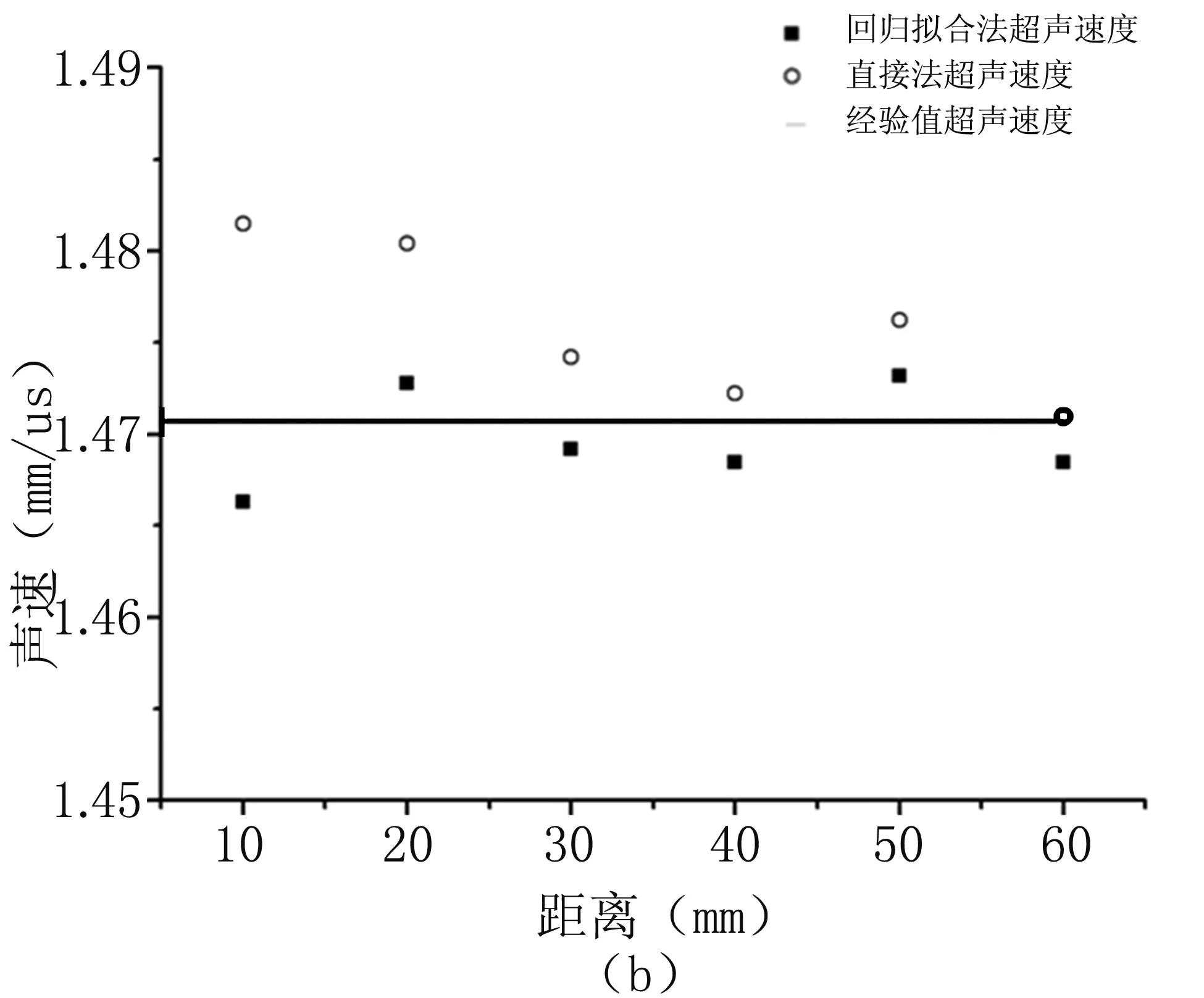
图5 不同定义下两种方法得到的超声速度与经验值超声速度比较(a).定义A;(b).定义BFig.5 Comparison of SOS and empirical value obtained by two methods with different defining (a).defining A; (b).defining B
4 总结
定量超声技术对于骨质疏松症的早期检查具有很大意义。为了更精确地测定定量超声骨密度测量系统的延迟时间,减少骨超声传导速度的测量误差。本研究提出了最小二乘线性回归拟合法。为验证方法的有效性,通过与直接法测得的结果进行对比,发现传统方法误差偏大。且在不同的定义下,本研究方法的测量误差均明显低于传统方法。由此可知,回归拟合法能避免直接法测量中的系统误差,测得准确的系统延迟时间。在特定实验条件下,明显减小了超声传导速度的测量误差,为定量超声骨密度测量系统的后续研究提供了条件。
