基于时滞特性分析的车辆主动扩稳优化控制
2020-07-15刘姿玚郭洪艳
王 萍,刘姿玚,陈 虹,郭洪艳†
(1.吉林大学汽车仿真与控制国家重点实验室,吉林长春 130025;2.吉林大学通信工程学院,吉林长春 130025)
1 引言
随着能源危机与生态环境的恶化,新能源汽车成为社会发展的大趋势,四轮驱动电动汽车是新能源汽车的重要部分.采用四轮独立技术的电动汽车可以使底盘电子化和主动化,并且整车使用线控驱动技术,比传统车更利于实现主动安全技术.目前各种主动安全控制系统被应用到汽车上,如制动防抱死系统(anti-lock brake system,ABS)、牵引力控制系统(traction control system,TCS)、主动四轮转向系统(4 wheel steering,4WS)、主动前轮转向系统(active front steering,AFS)、主动制动系统等[1],进一步减少交通事故的发生.
汽车主动转向与差动制动技术被广泛应用于分布式驱动电动汽车上,各国学者对此技术进行了大量研究.在文献[2]中,Roshanbin等采用滑模控制分别对四轮独立转向、独立制动及二者协调控制进行研究,设计自适应优化分配算法控制车辆稳定性.吉林大学高红博[3]设计了LQR最优控制策略,通过差动制动提高半挂汽车列车在转向制动时的方向稳定性.北京科技大学李果等人[4]针对转向和制动协同控制的问题,提出了一致性协同控制,能够改善汽车制动稳定性能和转向性能.上述研究虽然都能改善车辆稳定性,但并未考虑到控制系统的应用带来的执行机构响应滞后问题.
执行机构时滞的存在会对车辆系统稳定性产生影响,甚至会造成汽车失稳.因此研究执行机构时滞的建模以及其对车辆稳定性的影响是十分必要的[5-6].目前解决时滞的方法有:采用智能材料等提高传感器和执行机构等元件的响应速度,直接积分法,Smith预估补偿控制法和移相法等[7-9].一般来说,车辆系统中的时滞都是动态且随机的,且有时滞的过程很难用标准反馈控制器来控制.由于模型预测控制对时滞具有实时补偿的特性[10-11],本文通过对车辆临界稳定时滞进行分析,设计了一种基于预测控制的主动扩稳控制器,可以对多通道输入时滞进行有效补偿,保证车辆横摆角速度能准确跟踪期望值,同时质心侧偏角在相平面的稳定边界内,达到主动扩稳的目的.
2 系统建模与时滞特性分析
传统二自由度车辆模型的示意图如图1所示,面向控制器的设计,考虑车辆的横摆运动和侧向运动,动力学方程由式(1)来描述:
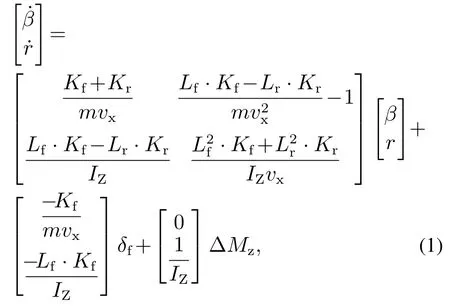
其中:β(rad)和r(rad/s)分别为车辆的质心侧偏角和横摆角速度,δf(rad)和ΔMz(N·m)分别为车辆的前轮转角和附加横摆力矩.车辆的其他参数如表1所示.
考虑前轮转向和差动制动等机构的执行时滞,假设前轮转向和差动制动的执行时滞分别为τ1和τ2,建立含输入时滞的模型如式(2)所示:
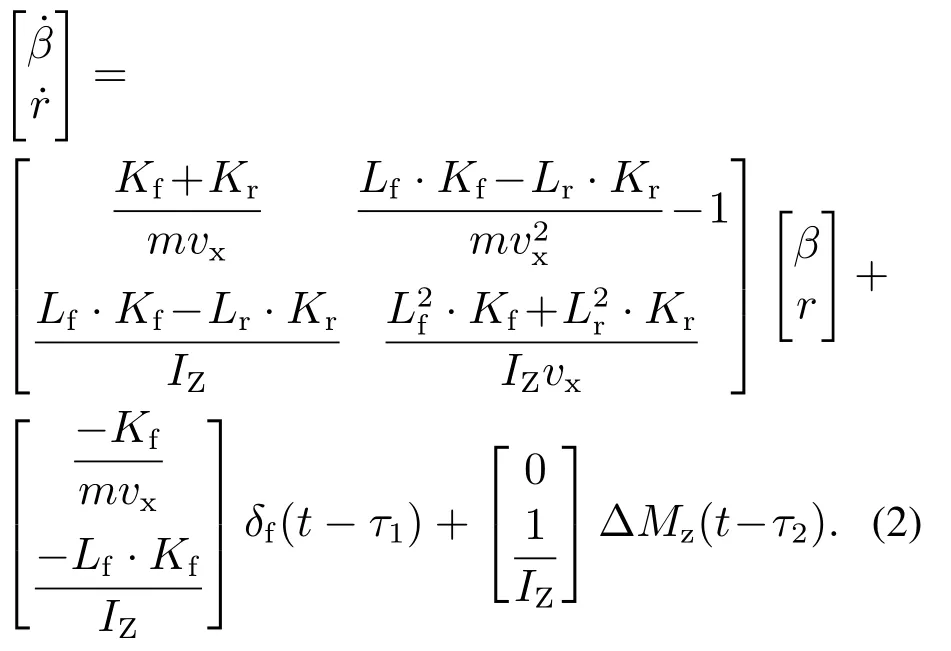
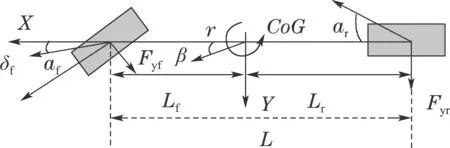
图1 二自由度车辆模型Fig.1 Two degree-of-freedom vehicle model

表1 车辆参数表Table 1 Vehicle parameters

式中:


下面分析两个控制输入通道的时滞对系统性能的影响.首先,在veDYNA仿真软件中搭建整车模型作为被控对象,忽略控制输入时滞,设计横摆角速度PID跟踪控制器,控制框图如图2所示.
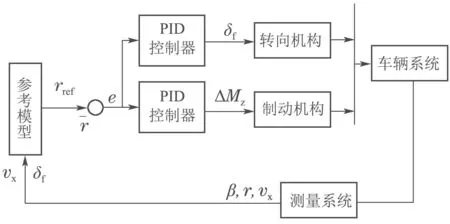
图2 基于PID的横摆稳定控制系统框图Fig.2 Yaw stability control system diagram based on PID
图中参考模型根据车辆的当前状态计算横摆角速度的期望值,稳态时车辆的质心侧偏角变化率和横摆角速度变化率均为0,即根据式(1),给出理想横摆角速度的近似表达式如下[12]:

其中:L=Lr+Lf,稳定系数K=
在vx=80 km/h,μ=0.8时,调节前轮转角执行机构的PID参数为P=-10,I=-80,D=0;调节差动制动执行机构的PID 参数为P=-580000,I=-10000,D=0,跟踪效果如图3所示.
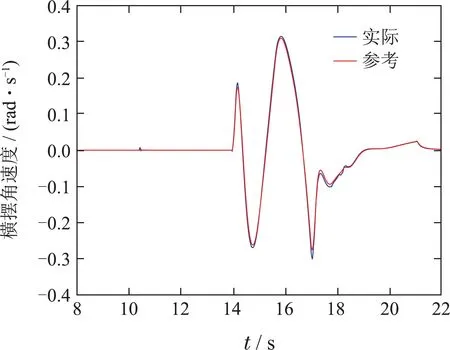
图3 无时滞情况下基于PID的横摆角速度跟踪曲线Fig.3 The yaw rate using PID controller without time delay
然后,建立β-˙β相图来作为车辆稳定性的判定依据[13-14].这里给定车速为vx=80 km/h,路面附着系数为μ=0.8工况下的稳定边界如图4所示,图中闭合虚线框表示在给定工况下,质心侧偏角相平面确立的稳定域边界.

图4 PID控制器作用下的β-相平面稳定域边界Fig.4 β- phase plane stable boundary with PID controller
最后,在每个控制输入通道内引入有界的随机时滞模块,具体控制框图如图5所示,不同的输入时滞对系统横摆稳定性的影响体现在相平面中,以β-˙β相图为基本判稳依据,同时将质心侧偏角、最小侧向加速度及最小侧倾角等作为辅助依据[15-17],用随机算法选取随机时滞,辨识影响车辆横摆稳定性的执行机构时滞边界,并将时滞的取值空间划分为稳定域、过渡域和失稳域.
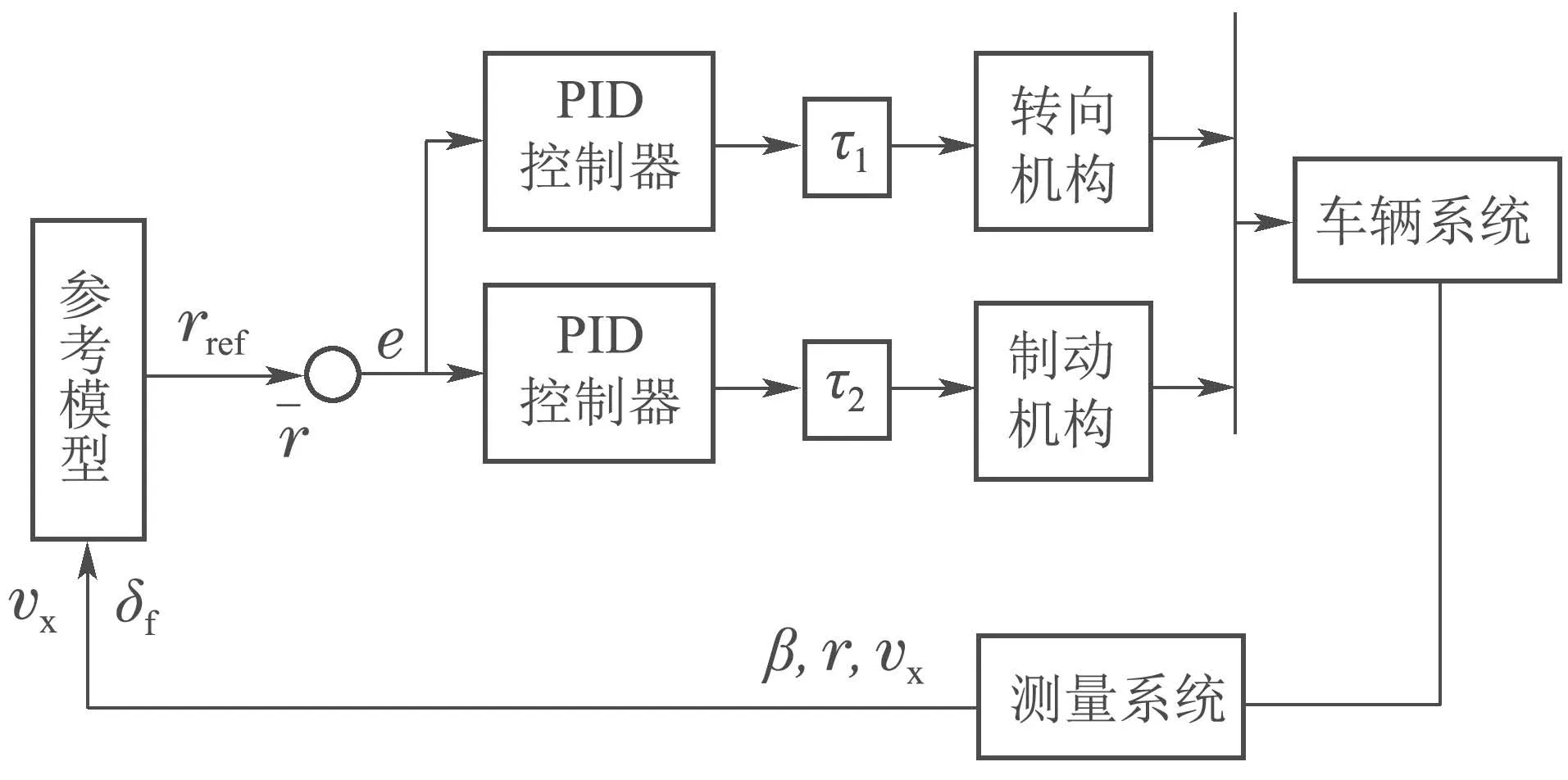
图5 考虑控制输入时滞的横摆稳定控制系统框图Fig.5 Yaw stability control system diagram with the control input delay
在车速为vx=80 km/h,路面附着系数为μ=0.8时的双移线工况下,图6给出了前轮转向机构与差动制动机构同时存在时滞时效果图.结合车辆系统实际存在的执行机构时滞,即在实践中,车辆前轮转向机构存在0.05~0.16 s的延迟[18],实际差动制动机构延迟时间为0.018~0.1 s[19].PID控制器作用下的稳定时滞边界小于实际存在的时滞,尤其是差动制动机构的稳定边界远远小于实际时滞的下界.
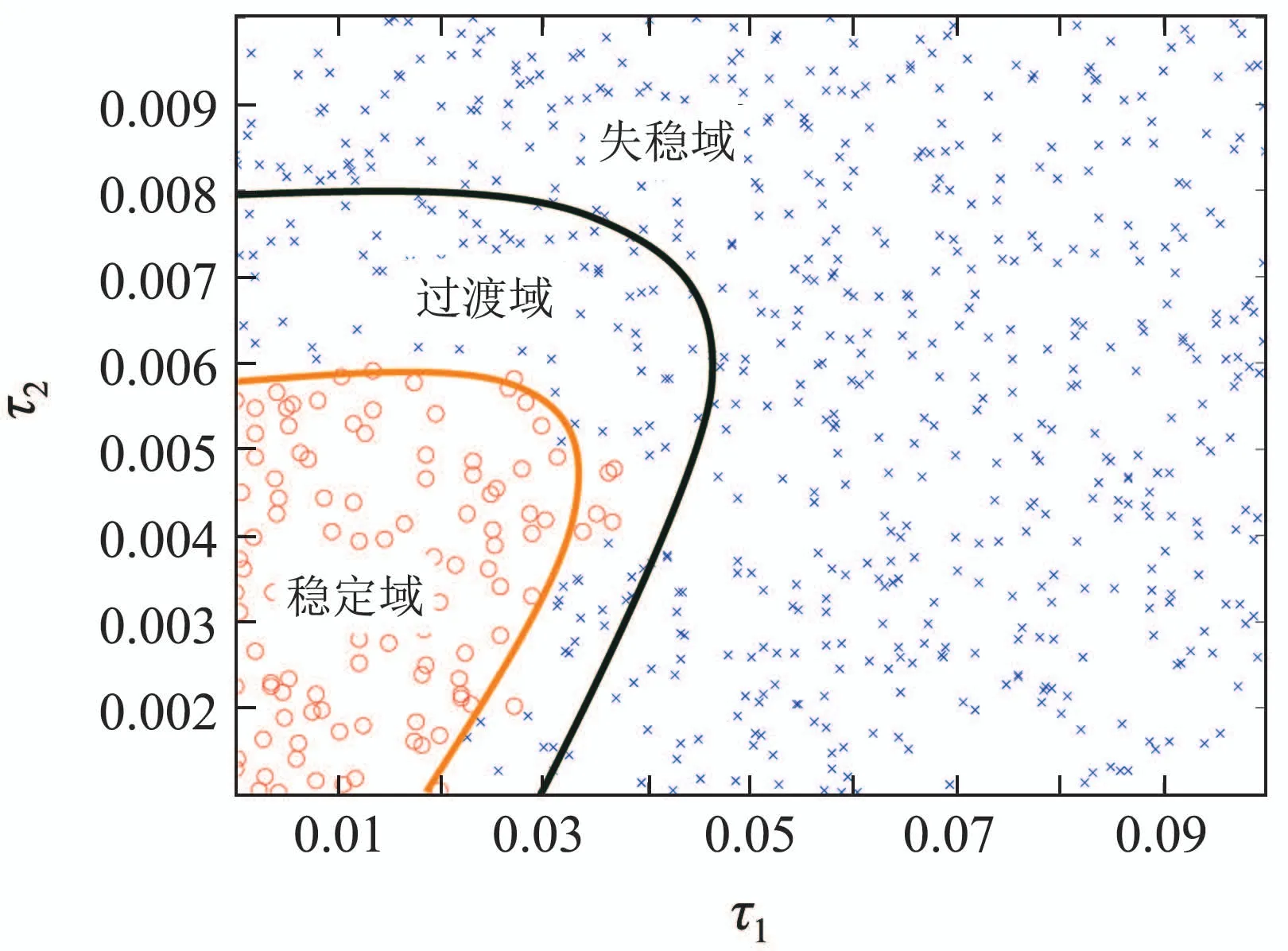
图6 PID控制器作用下的两通道时滞耦合边界Fig.6 Two channel coupled time delay boundary with PID controller
3 控制器设计
由上节分析可知,当时滞大于稳定边界时,车辆系统的稳定性会受到很大的影响,甚至失稳,因此需要通过设计控制器补偿各个输入通道的时滞,优化前轮转角和附加横摆力矩,使得横摆角速度跟踪期望值.
3.1 预测模型
以Ts为采样周期,将连续模型进行离散化,这里取,则系统的离散化模型为
引入积分以减少或消除静差,用增量形式将式(5)改写为式(6)所示:
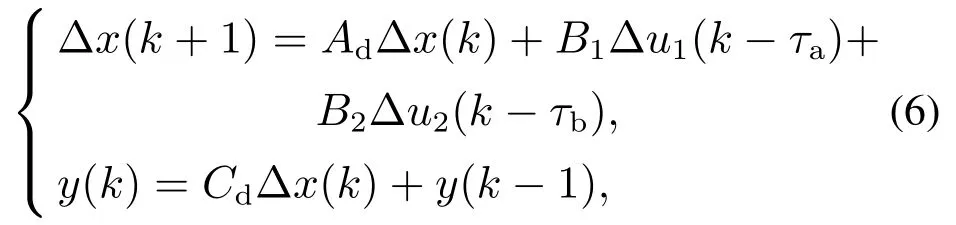
式中:
3.2 未来轨迹预测
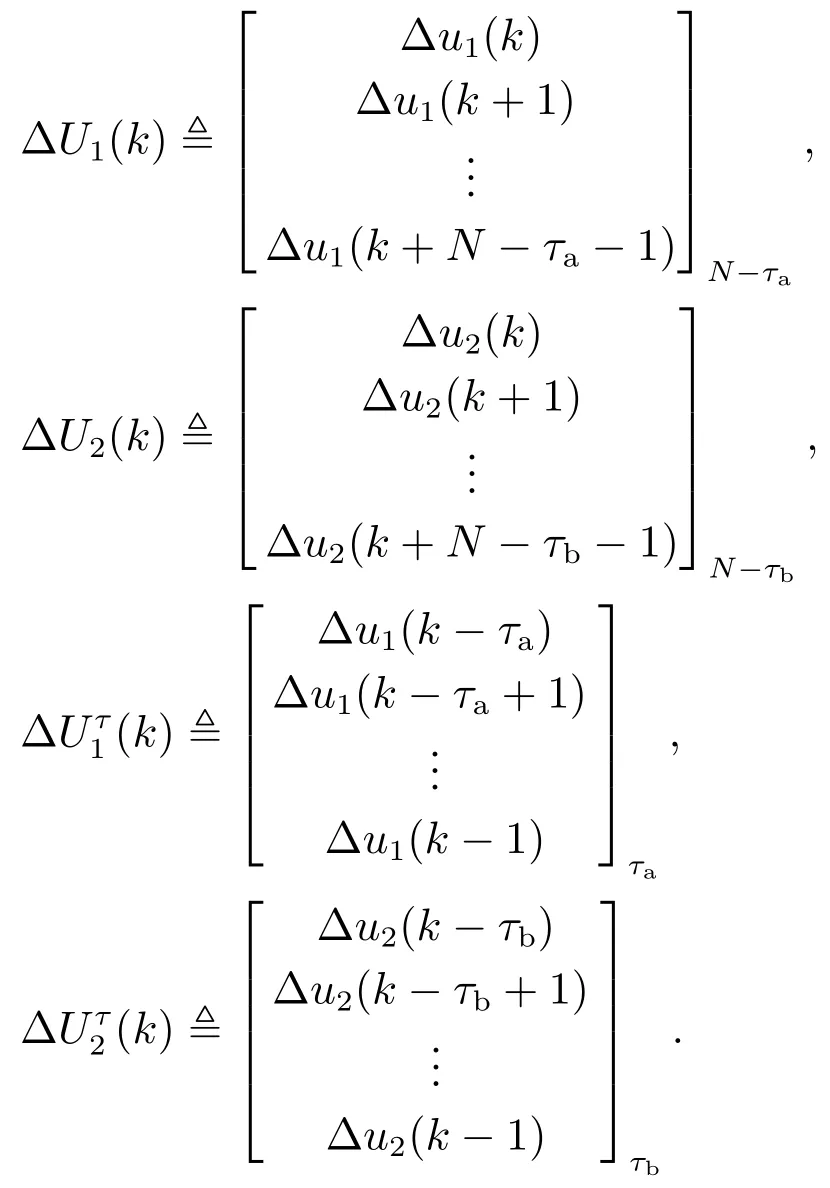
在k时刻以x(k)为初始条件,基于模型(6)预测未来动态.由上述时滞分析知τa>τb,定义系统的控制时域和预测时域为N,且N >max(τa,τb).因为系统控制输入时滞的存在,k 时刻的控制输入需要在max(τa,τb)步以后才能全部作用于系统,因此本文将系统预测输出定义为
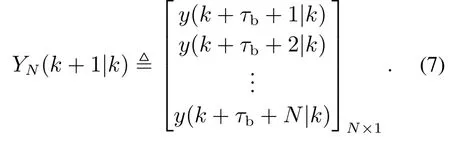
将控制输入分为4 个部分,优化变量ΔU1(k),ΔU2(k)和k时刻的已知输入
对系统未来N步输出的预测为

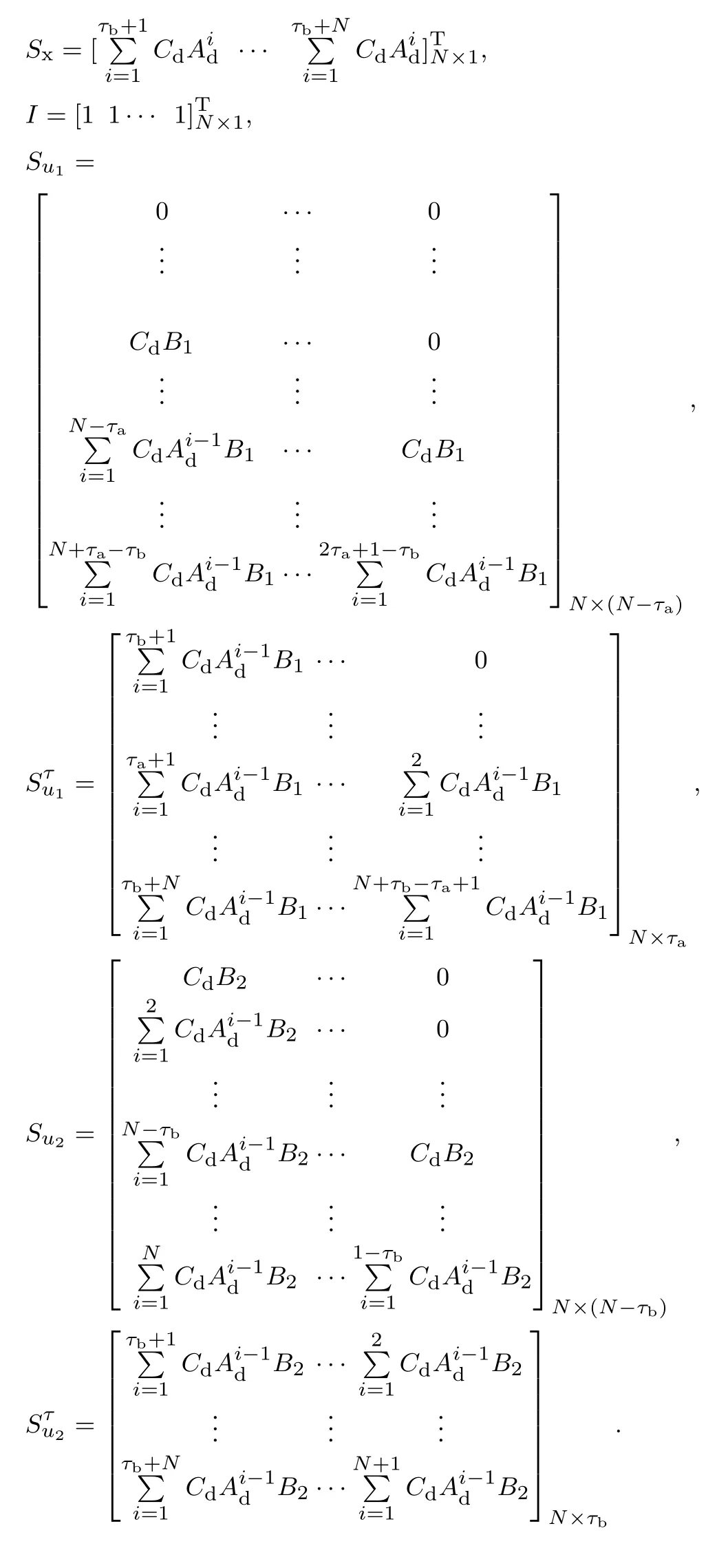
式(8)中的系数矩阵具体见附录.
注1本文基于预测控制思想,将具有输入时滞的控制系统的预测输出的第1个分量设为y(k+τb+1|k),重新推导得到预测方程(8).从方程(8)可以看出,输出时滞只影响这两部分,此时的时滞不会对预测控制中的优化问题求解带来计算负担.
注2这里给出的是τa>τb的情形,在应用中可能会遇到τa<τb的情况,只需改变这各部分中涉及的τa和τb即可,控制器的整体框架无需改变.
3.3 优化及反馈控制
本文主要的控制要求就是通过补偿时滞使得横摆角速度更准确跟踪期望值,进而提高车辆稳定性.因此本文用预测输出YN(k+1|k)来描述系统的未来状态,定义控制输出的参考序列为

此外,车辆转弯时状态发生剧烈变化,执行机构时滞存在时使横摆角速度及质心侧偏角震荡明显,从而对车辆稳定性造成影响,因此算法通过优化‖Γu1ΔU1(k)‖2+‖Γu2ΔU2(k)‖2来减小震荡.
本文通过加权阵Γy,Γu1,Γu2来调节三者之间的权重,优化方程描述如下:

通过求解优化问题(9),找到优化控制序列:

其中:
将优化控制序列ΔU*(k)的第1个分量

代入u(k)=u(k-1)+Δu(k),得到系统的优化控制输入u*(k).
4 仿真验证
设定车辆的纵向速度为vx=80 km/h,路面摩擦系数μ=0.8,时滞τ1>τ2,取采样周期Ts=0.001 s,控制时域和预测时域的值N=35.根据前边得到的时滞边界τ1=0.03 s,τ2=0.008 s,优化方程(10)的加权矩阵.取Γy=I2×2N,Γu1=0.2×I2×N,Γu2=0.18×I2×N.下面给出本文设计的MPC控制器与PID控制器的性能对比.
图7分别给出了不同控制器作用下的横摆角速度跟踪曲线,从图中可知,MPC控制器可有效补偿时滞的影响,且有很好的跟踪效果.两种控制器的跟踪横摆角速度曲线都是由方程(4)得到的,尽管是同一个工况,但是由于前轮转角信号不同,使得期望值也不同.图8给出了质心侧偏角对比曲线,MPC控制器得到的曲线变化范围更小.图9和图10分别给出附加横摆力矩和前轮转角曲线,对比可知MPC控制器的能耗更小.
基于MPC控制器的β-˙β相图和时滞边界如图11和12所示.从图中可以看出,MPC控制器具有更大的稳定域,可以容忍的时滞大于系统中的真实时滞.
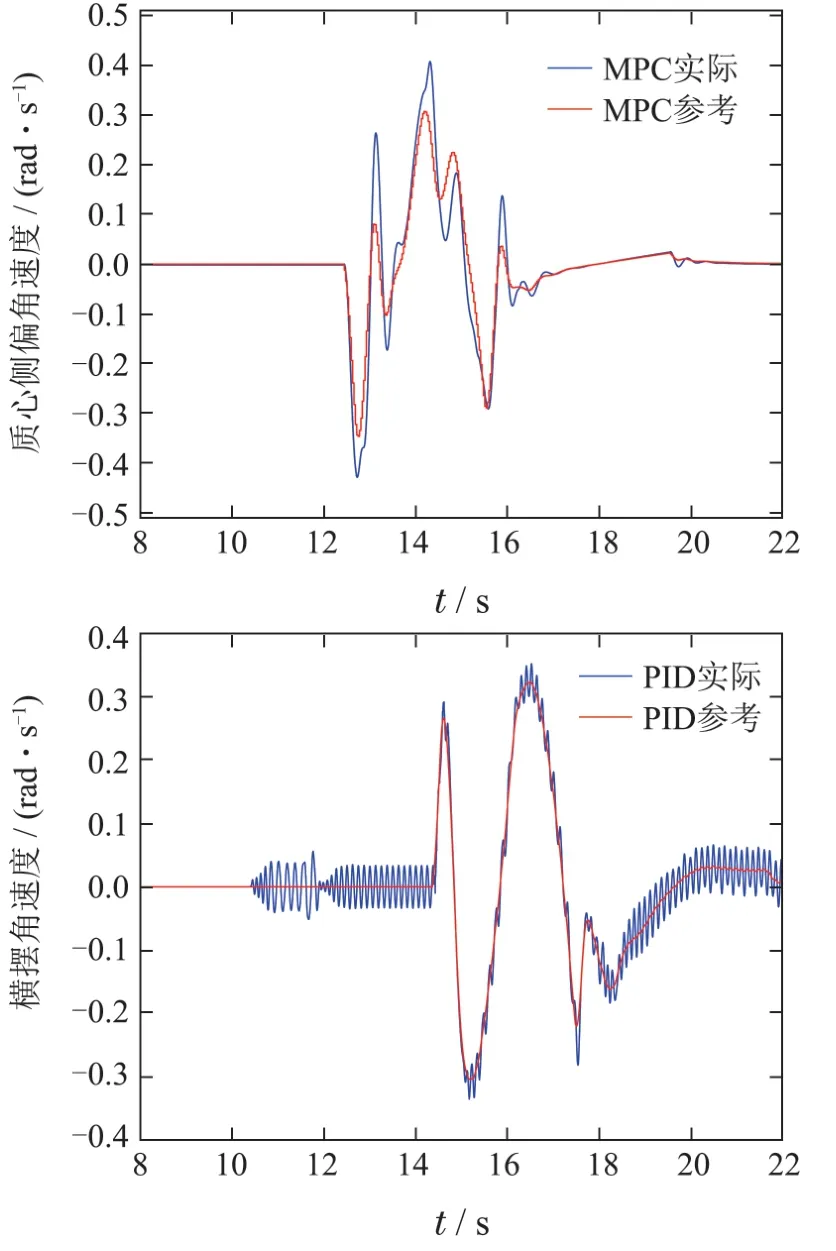
图7 PID与MPC的横摆角速度对比Fig.7 The yaw rate comparison between PID and MPC controller
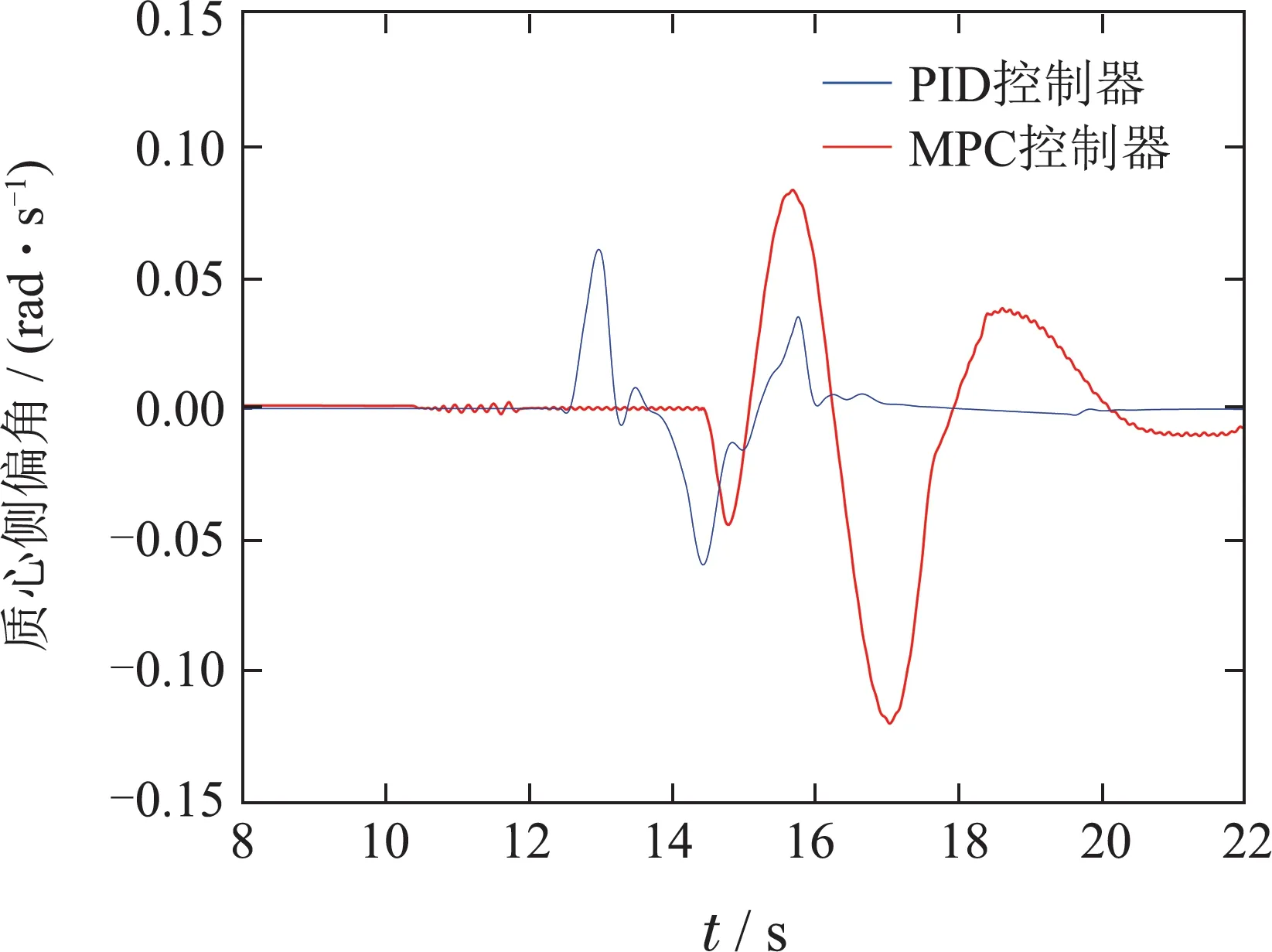
图8 PID与MPC的质心侧偏角对比Fig.8 The sideslip angle comparison between PID and MPC controller
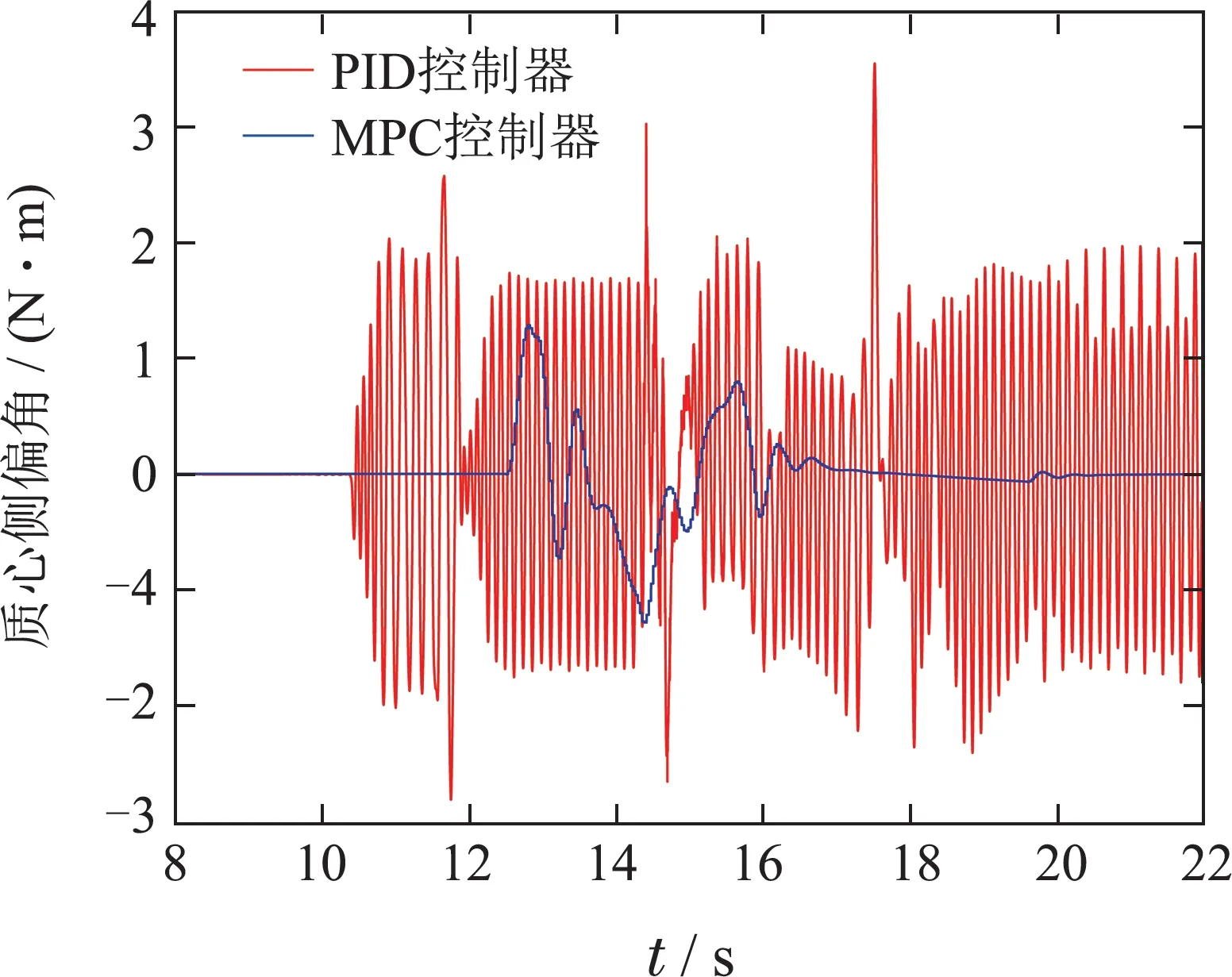
图9 附加横摆力矩对比Fig.9 Additional yaw moment comparison
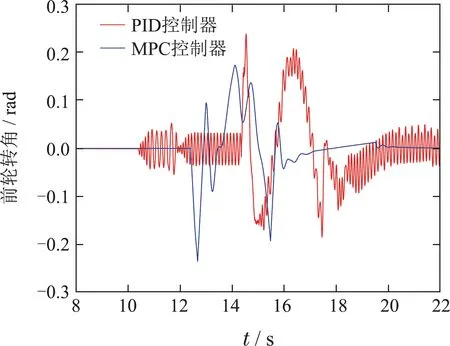
图10 前轮转角对比Fig.10 Front wheel steering angle comparison
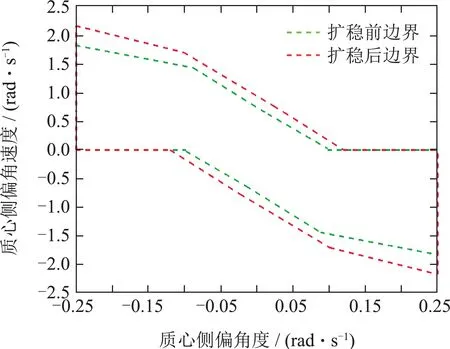
图11 不同控制器下的β-相图Fig.11 β- phase plane with different controllers
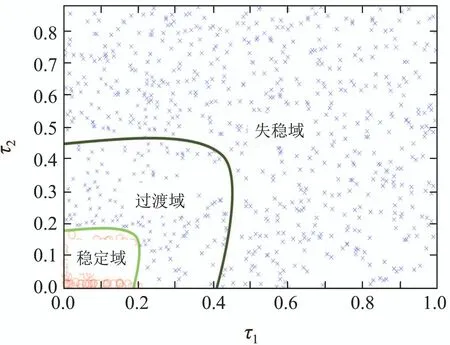
图12 MPC控制器作用下的两通道时滞耦合边界Fig.12 Two channel coupled time delay boundary with MPC controller
为了说明本控制架构的灵活性,本文改变模型中的输入时滞,车辆状态如图13-14所示,图中蓝色线表示第1组时滞τ1=0.03 s,τ2=0.015 s;绿色线表示第2组时滞τ1=0.2 s,τ2=0.13 s;红色线表示第3组时滞τ1=0.16 s,τ2=0.1 s.以上3组仿真工况均无需改变控制器整体框架,只需改变与τ1和τ2相关的矩阵维数.由图可知,实际横摆角速度可以较好的跟踪期望值,质心侧偏角在较小范围变化.
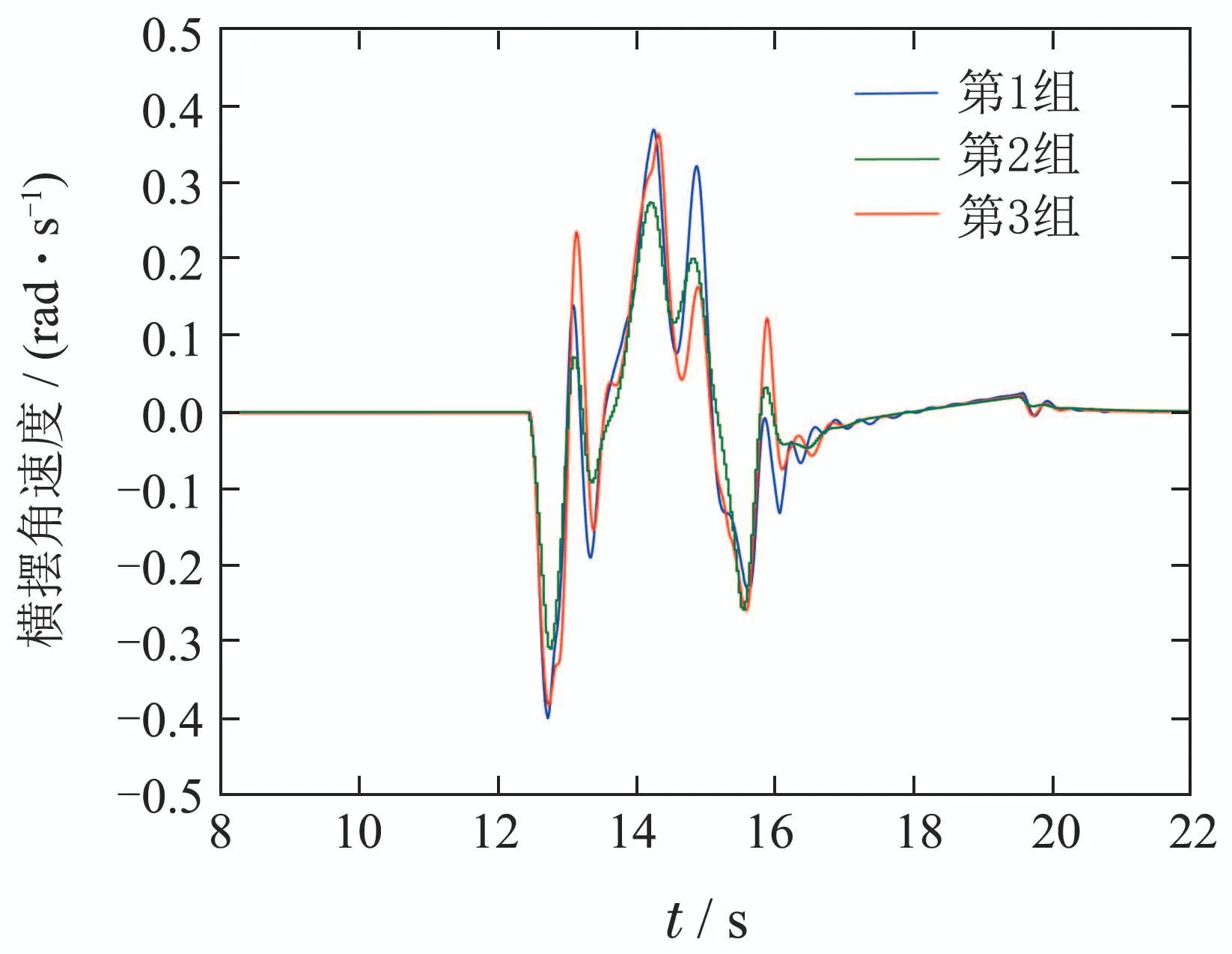
图13 不同时滞下的横摆角速度对比Fig.13 Raw rate comparison with different time delay
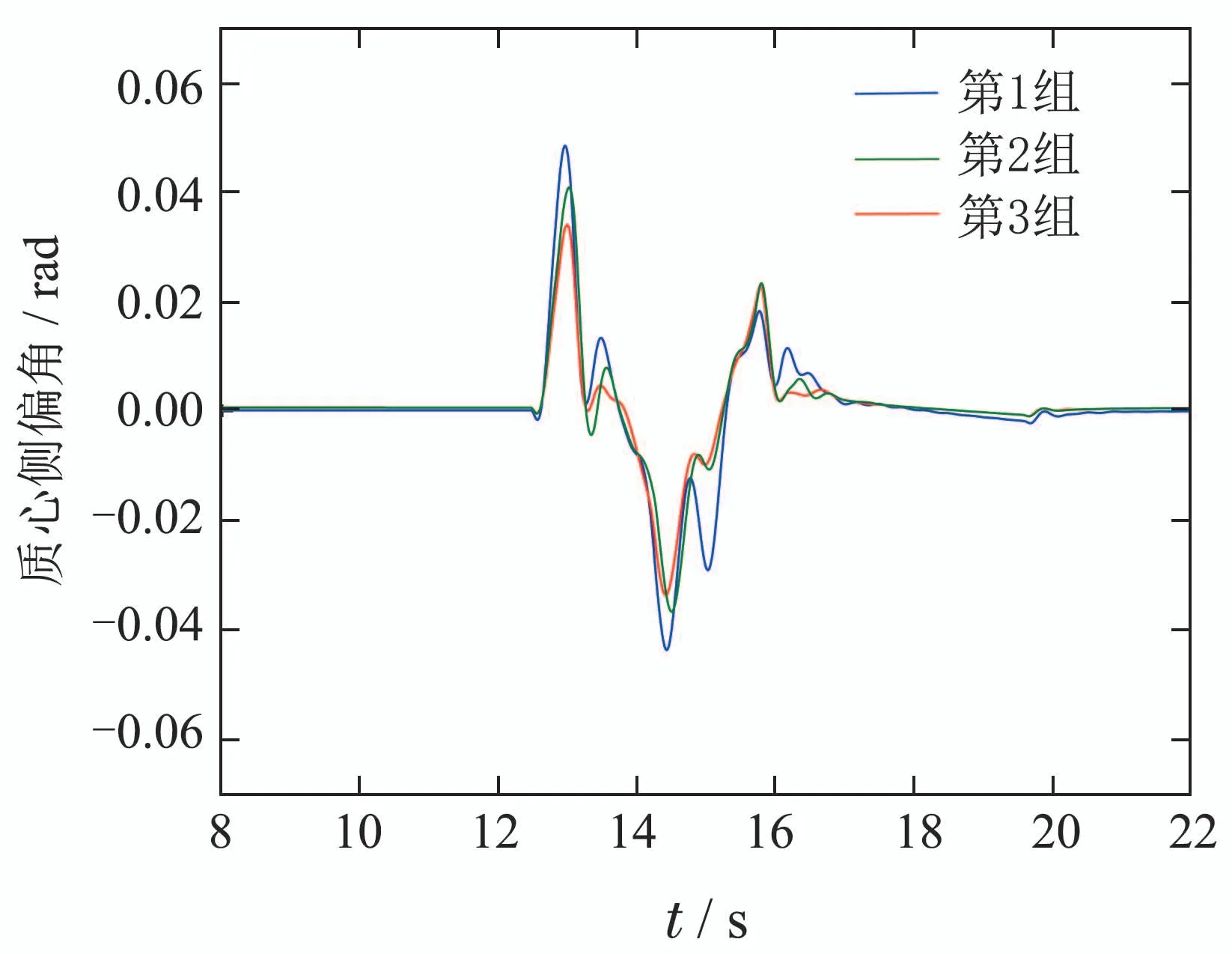
图14 不同时滞下的质心侧偏角轨迹Fig.14 Sideslip angle with different time delay
5 结论
执行机构时滞对车辆系统稳定性的影响是不可忽视的,本文应用随机算法选取随机时滞,结合相平面判断方法分析时滞对车辆系统稳定性的影响,辨识耦合时滞边界.考虑多通道输入时滞,基于预测控制设计具有一定自适应性的多通道多输入时滞补偿控制器,使车辆能更好的跟踪期望的横摆角速度,同时满足质心侧偏角变化范围小,且其相轨迹在相平面的稳定域边界内,并且在一定范围内对多个通道的多个输入随机时滞进行有效补偿,且不会对控制器整体框架造成影响.通过仿真验证了控制器的有效性,从而达到主动扩稳的目的.
附录系数矩阵