输入输出受限船舶的轨迹跟踪自适应递归滑模控制
2020-07-15沈智鹏毕艳楠
沈智鹏,毕艳楠,王 宇,郭 晨
(大连海事大学船舶电气工程学院,辽宁大连 116026)
1 引言
船舶运动控制是控制理论在航海技术领域的重要研究课题之一,其目的是不断推动船舶向自动化,智能化等更高水平的发展,进而提高船舶在航行中的安全性,经济性以及舒适性.全驱动船舶因其高精度高安全性等特点在海洋资源勘探.海上消防与供给等领域得到广泛应用,研究如何在海洋工程中控制船舶精确的跟踪设定轨迹引起研究学者广泛关注.由于船舶的非线性,大惯性,大时滞等特点,且存在模型不确定,输入受限,输出受限和易受海洋环境干扰等问题,因此研究船舶的轨迹跟踪问题受到一定的困难和挑战.
反演法因其递推的设计思想和规范的设计过程成为解决非线性控制问题的有效方法,被广泛地应用于各个领域的控制设计中[1].但是传统反演法在进行控制器设计时,对虚拟控制求导容易增加计算负担,导致控制器设计更为复杂.为此,Swaroop等[2]在反演法中引入一阶低通滤波器提出动态面控制技术,通过其一阶函数代替导数项,有效降低系统的计算复杂度,因此得到广泛应用[3-5].在海洋工程中,外界干扰以及船舶模型不确定都是难以避免的实际情况.为此,Do等[6]采用扰动观测器和反步法设计船舶全局轨迹跟踪控制器,有效抑制了外界干扰.Shin等[7]则采用自适应律有效估计外界干扰,并结合动态面技术和反步法设计路径跟踪控制器,得到良好的控制效果.针对模型不确定和外界干扰同时存在的情况,Gao等[8]设计一种自适应状态反馈观测器估计模型不确定部分和外界干扰,有效的提高了系统的抗干扰能力.Cui等[9]提出把状态观测器与自适应技术结合使用,通过Lyapunov函数设计控制器确保轨迹跟踪误差收敛到零.Li等[10]采用反演法设计直接自适应神经网络方法逼近系统未建模动态和外界扰动,取得良好的控制效果.Peng等[11]则采用径向基神经网络对模型未知部分进行逼近,有效提高了系统性能.
目前针对未知干扰和模型不确定性的船舶控制问题已取得了丰硕的研究成果,然而船舶执行机构受限是一个不可忽视的问题,尤其是控制器饱和问题会使执行器不能达到控制信号要求的指令,造成系统震荡,甚至导致控制系统失稳.为此,Chwa等[12]将控制结构以模块化的方式构建,不同于常规反步法设计方式,该方法可以直接对系统进行控制约束,实现了船舶的轨迹跟踪.Liu等[13]针对存在输入饱和的船舶,直接采用辅助系统处理输入饱和问题,达到期望效果.Chen等[14]针对一类输入受限系统,设计指令滤波控制器对控制输入进行有效限幅,在确保系统稳定的前提下保证控制输入受限,还可以解决因反演法引起的“微分爆炸”问题.但文献[2-6,11,14]所采用的滤波器具有一定的延迟性,且对被控对象的模型误差,参数变化以及外部干扰的敏感性较强.沈智鹏等[15]将递归滑模与动态面技术相结合,利用子系统误差设计递归滑模动态面,避免因动态面导致参数摄动脆弱的问题,有效地提高了船舶的稳定性和控制精度.
在实际海洋工程作业中,为避免船舶发生碰撞事故,需要保证船舶航行轨迹约束在有限区域内.为此,Meng等[16]采用系统变换技术将原始约束系统转换为等效的无约束系统,解决输出约束问题.He等[17]利用Moore-Penrose伪逆技术设计输出反馈控制器,实现输出受限情况下的船舶系统的轨迹跟踪.Zhao等[18]针对船舶模型存在未知部分以及船舶输出受限的轨迹跟踪问题,采用对称障碍Lyapunov 函数(symmetric barrier Lyapunov function,SBLF),结合自适应以及神经网络技术,设计SBLF自适应神经网络轨迹跟踪控制器,使船舶实际轨迹最终收敛在有限海域内.Liu[19]针对一类输入和输出约束的非线性不确定系统的跟踪控制问题,引入神经网络技术估计系统未知部分,并且采用非对称障碍李雅普诺夫函数(asymmetric barrier Lyapunov function,ABLF)防止船舶系统的实际轨迹违反受限区域.然而文献[10-11,18-19]采用的神经网络控制算法需要对所有权值进行实时在线学习,大大增加了计算量,导致出现“维数灾难”等问题[20].为避免“维数灾难”问题,文献[20-21]采用最小参数法逼近模型未知项,以神经网络权值的范数在线学习代替所有权值在线学习,减少控制器的计算量,得到良好的控制效果.
受以上研究的启发,本文针对输入输出受限条件下的船舶轨迹跟踪控制问题,考虑系统存在不确定性且受到未知外界干扰的情况,提出一种基于时变非对称障碍李雅普诺夫函数的最小参数自适应递归滑模控制方法.该方法通过时变非对称障碍Lyapunov函数(time asymmetric barrier Lyapunov function,TABLF)将船舶实际轨迹约束在时变范围内,有效拓宽了输出受限范围,更符合实际海洋工程应用.考虑系统的输入饱和问题,设计指令滤波器对控制输入进行有效限幅,并在此基础上综合考虑船舶位置以及速度误差间的关系设计递归滑模控制律,提高系统鲁棒性,利用双曲正切函数和Nussbaum函数补偿由输入饱和引起的不确定非线性项.采用最小参数法逼近模型不确定项,减小系统计算负担,并提高系统稳定性.最后,将一艘供给船作为仿真研究对象,验证所设计控制器的有效性.
2 问题描述及预备知识
2.1 问题描述
对于三自由度输入受限的全驱动水面船舶,其非线性数学模型[22]可表示为

式中:η=[x y ψ]T为船舶实际轨迹;υ=[u v r]T为船舶在附体坐标系下的速度;J(ψ)为坐标转换矩阵,且J-1(ψ)=JT(ψ);M=diag{m11,m22,m33}为重量惯性和水动力附加惯性矩阵;为科氏向心矩阵;D=diag{d11,d22,d33}为阻尼矩阵;Δf为船舶模型未知部分;d=[d1d2d3]T为外界环境因素产生的未知干扰;τ=[τ1τ2τ3]T为控制器输入;sat(τ)为受饱和函数约束的控制输入,具体描述为

由于船舶控制力和力矩受执行器饱和约束,考虑在反演法设计过程中,要求所有函数必须可导,且不可导的分段函数不利于工程应用,因此引入分段光滑函数进行饱和约束,即双曲正切函数g(τ)=[g1(τ1)g2(τ2) g3(τ3)]T表示如下:
定义误差函数为

式中 μ(τ)=[μ(τ1) μ(τ2) μ(τ3)]T为有界函数,其界限值表示为

结合式(2),可将式(1)变换为

式中 dΔ=μ(τ)+d为系统风浪干扰和界限误差构成的复合干扰变量,由式(2)和假设2可知,dΔ是有界的.
假设1船舶的期望轨迹ηd,有界而且光滑可导,且均有界.
假设2假设M,C(υ)和D已知.Δf未知但有界,外部环境干扰d未知但有界.
2.2 预备知识
引理1对于ς >0,A∈R有以下不等式成立:

式中 ϖ=0.2785满足ϖ=e-(ϖ+1)的条件[14].
定义1如果连续函数N(s)R →R具有下列属性,则N(s)被称为Nussbaum型函数[23],
引理2设V(·)和χi(·)为定义在[0,tf)上的光滑函数,其中V(t)≥0,∀t∈[0,tf),且N(χi)为一光滑Nussbaum型函数.如果

成立,其中:常数a0,a1,γχ,oi>0,则在t∈[0,tf)时,有界.
注1根据文献[24]的命题2,若闭环系统有界,则tf=∞.
BLF根据几何意义可分为对称(SBLF)和不对称(ABLF)两种情况,其中SBLF是ABLF的一种特殊情况,因此ABLF更具有一般性,并且ABLF可以放宽输出的起始值条件因此具有更大的灵活性;根据时间意义可分为时变BLF和时不变BLF两种情况,其中时不变BLF是时变BLF的一种特殊情况,时变BLF更具有一般性.本文为不失一般性,选取时变ABLF处理约束问题.即对于紧集Z:{z1(t):-ka<z1(t)<kb},时变非对称障碍Lyapunov函数为

式中 2p为正整数,且满足2p ≥n.
注2定义为输出界限值,Y0为期望值,
引理3∀z∈R,|z|<1且整数p >0有如下不等式成立[25]:

引理4在紧集Ωz中的连续光滑函数β(z):Rn→R,存在理想权值矩阵W*满足[26]


其中:cj∈Rn和bi,j分别为函数的中心点向量值和宽度,j为神经网络隐含层的第j个节点.e(z)为神经网络的逼近误差,|ei|<,i=1,2,3.
由假设2可知,对于干扰变量dΔ和神经网络逼近误差e(z)每一分量来说,存在有界函数δi>0,使|ei|+|dΔi|<δi,i=1,2,3,即逼近误差e(z)和复合干扰变量dΔ的界向量可表示为δ=[δ1δ2δ3]T.
控制目标:针对全驱动船舶数学模型(3),在假设1-2满足的条件下,考虑船舶模型存在不确定部分,船舶输入输出受限且受外部风浪扰动的情况下,设计轨迹跟踪控制律g(τ),使船舶实际轨迹不违反受限范围且保持高精度航行.
3 船舶轨迹跟踪控制器设计
考虑船舶输入受限,模型存在不确定项,外界扰动未知且船舶受输出约束的情况下,设计指令滤波器,并将双曲正切函数和Nussbaum函数有机结合,设计时变非对称障碍李雅普诺夫函数,采用最小参数法和递归滑模技术,设计基于ABLF的自适应递归滑模控制方案.为避免系统因饱和效应导致执行器损坏甚至系统失稳和因反步法设计导致计算量膨胀的问题,本文采用指令滤波器对控制输入进行幅值限制[14]:

式中:αi0为虚拟控制向量;ξi,ωin分别为指令滤波器的设计参数;sat(αi0j)=αij为αi的第j个元素,为αi0j的上、下界,其中:i=1,2;j=1,2,3.如果滤波器的初值收敛,即|αi0j(t0)|<那么该滤波器与文献[27]的标准滤波器的形式相同.因此,当ξi≥1时,滤波器的状态各自指数收敛于其输入值和其导数,同时αi,受虚拟控制向量和控制速率的限制[27].通过引入指令滤波器达到控制输入受限目标,同时避免了对虚拟控制量直接求导,有效降低计算复杂度.
定义系统滤波器误差向量Δαi=αi-αi0.
下面将结合递归滑模技术,设计输入受限控制器.
步骤1定义船舶位置误差滑模面向量s1∈R3.

式中 ηd=[xdydψd]T为全驱动船舶的期望轨迹.根据R(r)=[0 -r 0;r 0 0;0 0 0],对式(5)求导可得

注3为解决引入递归滑模后稳定性证明的难题,定义z1=JT(ψ)(η-ηd)代替常规位置误差向量z1=η-ηd.
为消除因引入ABLF而产生的包含Δα1非线性项,根据反演法思想,引入辅助系统
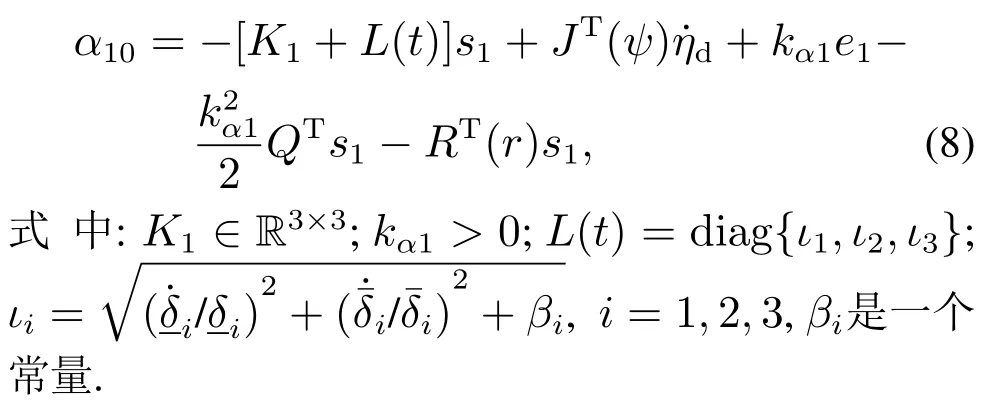
步骤2定义船舶速度误差向量为z2=υ-α1,并设计滑模面向量s2∈R3,

式中 C1∈R3×3为参数矩阵.
注4由式(9)可知,该设计综合考虑了船舶位置误差向量z1与速度误差向量z2之间的耦合关系.从式(9)的结构上可以看出,s2将z1与z2采用递归方式进行设计,且s2具有滑模面的特性,故为递归滑模设计方法.
考虑受执行器饱和约束特性的控制输出向量g(τ),引入辅助误差向量

结合式(3),对式(9)两边求导可得

为消除因引入ABLF而产生的包含Δα2非线性项,根据反演法思想,引入辅助系统
根据式(12),选取虚拟控制量α2为

以及自适应律
式中:K2,C1,,G,Λ∈R3×3为参数矩阵;γi,κi为由正设计常数ˆδ为δ 的估计向量;δ0=为δi的先验估计;Ξ=diag{tanh[s2,1/ε1],tanh[s2,2/ε2],tanh[s2,3/ε3]},s2,i为s2的第i个分量,εi为正的设计常数,i=1,2,3.
此外,在引入双曲正切函数逼近饱和函数后,根据式(3)可知,g(τ)成为系统执行器的控制输入.然而系统控制器的实际控制输出是τ,但由于此时仅与非线性函数g(τ)直接相关导致实际控制输出τ难以设计.为降低g(τ)的设计难度,本文引入辅助系统和Nussbaum函数.设计控制律τ为

式中:
选取Nussbaum函数

式中 γχ为正的设计参数.
注5本文引入具有光滑特性的双曲正切函数对执行器的力和力矩进行处理,可消除因输入饱和导致的执行器失控现象,同时为了降低饱和效应,减小输入受限对系统推进器误差的影响,引入Nussbaum函数补偿由饱和函数引起的非线性项.
4 控制器稳定性分析
选择时变不对称的障碍Lyapunov函数

式中:s1i为s1的第i个元素,
定义如下变量:

那么,式(18)可变换为

显然,只需令|ζi|<1,即可保证Vb是正定且连续可微的[24].

选择Lyapunov函数V1如下:

对式(21)关于时间求导得
式中 Km=K1+C1.
由

根据Young’s不等式
可得

选择如下Lyapunov函数:

对式(25)关于时间求导得
根据Young’s不等式可得

式中 λmin(·)是矩阵的最小特征值.
根据Young’s不等式可得

并应用双曲正切函数性质,故式(27)变为

式中:P=[ς1ς2ς3]T.对式(10)求导得

选择如下Lyapunov函数:
按照上述分析,总结定理如下:
定理1针对三自由度全驱动船舶的非线性运动学和动力学方程,考虑船舶的输入和输出受限,船舶模型存在未知部分,且易受到外部环境干扰,在假设1-2成立的情况下,设计指令滤波递归滑模控制器,并利用双曲正切函数和Nussbaum函数补偿输入饱和引起的非线性项,利用最小参数法的神经网络估计系统不确定部分,设计神经网络权值向量更新律式(14)并采用自适应律式(15)对神经网络逼近误差和外界环境干扰的和进行估计,采用ABLF将船舶系统实际轨迹约束在指定范围内,最终在基于ABLF的自适应指令滤波递归滑模控制律式(16)的作用下,得到闭环系统所有信号的一致最终有界性.设计合适的参数K1,K2,K3,ωin,ξi,γi,kei,kαi,βi,C1,κ,G,Λ,δ0,c,可以使船舶达到预设的暂态和稳态性能指标.
解不等式(33)可得

根据式(34)可知,V(t)一致最终有界,可得s1,s2,z3,e1,e2,一致最终有界,从而χi有界得出φi有界,则τ有界;由式(4)可知αi,i=1,2有界,则υ和αi0,i=1,2 有界;由和δ的有界性可知有界.从而得到船舶闭环系统内所有信号一致最终有界.
5 仿真研究
为验证所设计的船舶轨迹跟踪控制器的有效性,本节以文献[28]中一艘76.2 m供给船的数学模型作为仿真对象进行轨迹跟踪控制仿真试验.
船舶模型未知部分Δf设定为
为模拟真实的风浪扰动,本文采用风模拟真实浪扰动且只考虑规则波浪对船舶运动的影响[29].
本文设定船舶航行的期望轨迹为
船舶的初始位置和速度状态信息为

RBF神经网络的隐含层节点cj,1和cj,2在[-150,150]内平均分布,cj,3在[-15,15]内平均分布,b1,j=b2,j=3,b1,j=1,j=1,…,61;网络权值估计的初始值为0;取控制器参数矩阵

图1为本文算法与不采用障碍李雅普诺夫函数进行输出受限的方法(记为方法1)的船舶轨迹跟踪仿真曲线对比图,从图中可以看出在船舶模型存在不确定部分并受未知风浪扰动的情况下,本文算法不违反受限区域,相比于方法1更加远离受限边界,并更快到达期望轨迹,提高了系统的暂态性能.相比于方法1,本文算法可使船舶轨迹跟踪更加精确.图2为本文算法与方法1的跟踪性能比较曲线图,其中eη=|x-xd|+|y-yd|+|ψ-ψd|.由图可以看出,本文控制系统采用方法1,约6 s跟踪上期望轨迹;而采用本文算法后,约3 s跟踪上期望轨迹,因此,本文算法相比于方法1收敛速度有明显改进,稳态误差较小.图3为控制器输出力和力矩曲线图,实际船舶控制器的输出τ大于控制力和力矩的边界值,gi(τ)表示不加入递归滑模控制方法的执行器输入,g(τ)表示本文算法的执行器输入.由仿真图可知,gi(τ)的控制力和力矩曲线抖动更剧烈,且超出设定的输入受限范围,采用本文提出的控制策略后,g(τ)幅值被限定在安全范围之内且更加稳定,能够保证船舶系统更加安全稳定的航行.图4为最小参数法神经网络估计曲线,由图可知,神经网络对模型不确定部分估计效果较好,在约10 s估计上模型未知部分,其逼近过程存在一定误差,设计自适应律估计神经网络误差与复合干扰.图5为复合干扰和神经网络逼近误差之和及其估计值的历时曲线,可以看出自适应律参数选择合适,能够很好的估计复合干扰和神经网络估计误差最终保证船舶高精度航行.

图1 xy平面内船舶实际轨迹和参考轨迹Fig.1 Reference trajectory and actual trajectory in xy plane

图2 船舶的位置误差性能曲线Fig.2 Performance curve of ship position error

图3 输入受限后的控制器输出曲线Fig.3 Curves of controller outputsbefore and after input saturation versus time
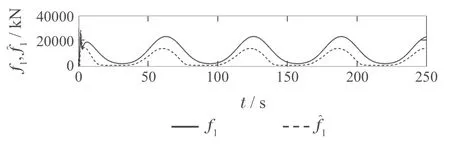
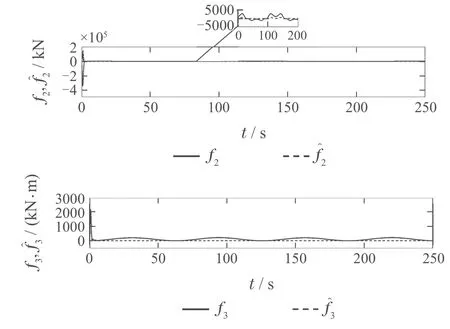
图4 最小参数法神经网络逼近曲线Fig.4 Curves of MLPNeural networks-based approximations

图5 外部环境干扰及其估计值的历时曲线Fig.5 Curves of the bounds of external environment disturbancesand their bounds of estimations
6 结论
本文针对三自由度输入输出受限的全驱动船舶轨迹跟踪控制问题,提出一种基于ABLF的自适应指令滤波递归滑模控制策略.首先设计基于最小参数法的神经网络算法逼近模型不确定部分,减少神经网络估计船舶模型未知部分的计算量,提高系统稳定性,采用自适应律估计神经网络逼近误差和复合干扰,提高系统精确程度.针对船舶输出受限问题,利用时变非对称障碍李雅普诺夫函数设计控制器,保证船舶系统的实际轨迹在时变的受限范围内.考虑系统的输入饱和问题,设计指令滤波器对控制输入进行有效限幅,避免因反步法导致的计算量膨胀问题,并在此基础上设计递归滑模控制律,克服了传统低通滤波器对其时间常数摄动脆弱的缺点,利用双曲正切函数和Nussbaum函数补偿由输入饱和导致的非线性项,提高系统的鲁棒性.基于Lyapunov函数证明本文设计的控制律可保证系统内所有信号的一致最终有界性.最后以一艘供给船舶为研究对象进行仿真研究,仿真结果表明,所设计的控制器有效解决了输入饱和问题和输出受限问题,在实际工程中具有一定的参考价值.
