基于列车速度的行车许可计算方法研究
2020-07-06杜江红郭军强
杜江红,郭军强
(1.北京全路通信信号研究设计院集团有限公司,北京 100070;2.北京市高速铁路运行控制系统工程技术研究中心,北京 100070)
1 概述
基于通信的列车自动控制系统在轨道交通领域得到广泛的应用,该系统是用通信网络实现列车与地面设备双向通信,利用列车位置信息、线路信息实时计算行车许可,实现移动闭塞。基于通信的列车自动控制系统大幅提高了区间通过能力,灵活组织双向运行和单向连续发车,适用于不用车速、不同运量、不同类型牵引的列车控制。在该系统中,地面设备根据列车位置信息、进路信息、区段占用信息、临时限速等信息计算列车行车许可,车载设备根据地面设备发送的行车许可生成目标—距离控制曲线,控制列车安全运行。然而地面设备在计算行车许可时,以前方列车车尾作为目标点,并考虑一定的防护距离作为行车许可的终点,车载设备以此来计算目标—距离控制曲线,存在列车过早制动,或延时牵引等情况,从而降低了区间列车追踪效率。
本文针对这一问题,提出基于列车速度的行车许可计算方法,进一步提高列车追踪能力,缩短追踪间隔,从而为提升运输效率提供理论依据。
2 场景分析
列车车载设备通过无线通信获取地面设备发送的最大移动授权范围内与前车的距离,以及前车的速度、制动、牵引、长度等信息。根据与前车距离及前车速度等信息,计算列车行车许可。该模型下计算的列车行车许可分为3 个关键点:列车追踪点、列车制动点、列车停车点。
列车追踪点:两车之间的最小追踪间隔点。列车制动点:列车目标—距离制动曲线的起点。列车停车点:行车许可终点。
本文对区间追踪、进站接车、车站发车场景下的基于列车速度的行车许可计算进行描述。
2.1 区间追踪
如图1 所示,区间多列车追踪时,根据前车速度计算本列车行车许可。区间运行ATP-A、ATP-B、ATP-C 三 列 车,区 间2G 处 有 正 向45 km/h 的临时限速,ATP-A,ATP-B,ATP-C三列车当前速度分别为160 km/h,80 km/h,120 km/h。现按照基于列车速度等信息计算行车许可方法,计算各列车行车许可。

图1 区间多车追踪行车许可计算示意图Fig.1 Schematic diagram of movement authority calculation when multi-train tracking in section
对于ATP-C 列车,列车当前速度为120 km/h,前方进站信号机S1 为禁止信号,计算列车停车点(SC停车点)为进站信号机S1 处回缩一定安全距离。根据列车当前速度、制动性能,以及至停车点(SC停车点)距离计算出以BC制动点为制动起始点的目标—距离制动曲线。
对于ATP-B 列车,列车当前速度为80 km/h,前车ATP-C 列车速度为120 km/h,则ATP-B 列车在TB追踪点前可将速度提升至120 km/h,TB追踪点距离ATP-C 列车车尾一定安全距离,在与前车ATP-C 保持安全追踪间隔距离的同时,保持与ATP-C 列车速度一致。ATP-B 列车以前车ATP-C停车点SC回缩一个ATP-C 列车车长,并考虑安全距离作为ATP-B 的停车点SB。根据ATP-B 的目标停车点SB,计算出该列车以BB制动点为制动起点的目标—距离制动曲线。
对于ATP-A 列车,列车当前速度为160 km/h,列车运行前方2G 处有45 km/h 的临时限速,区间运行前方有ATP-B 列车以及ATP-C 列车。以前方限速起点为目标速度点,根据ATP-A 列车与限速起点距离、列车当前速度、制动性能计算出以BA1制动点为制动起点的目标—速度制动曲线。根据限速区长度以及限速区终点距离ATP-B 列车的距离。计算出ATP-A 列车追踪ATP-B 列车的TA追踪点,计算出的TA追踪点距离ATP-B 列车当前位置保留一定安全防护距离,并在ATP-A 列车到达TA追踪点前,保持与ATP-B 列车速度一致,并在ATP-B 行车许可终点基础上回缩一个ATP-B 列车长度作为ATP-A 行车许可终点SA。以SA停车点为目标点,根据ATP-A 列车目标速度及制动性能,计算出以BA2制动点为制动起点的目标—距离制动曲线。
2.2 进站接车
如图2 所示,列车进站场时根据前车速度信息计算本列车行车许可,ATP-C 车进入3G 停车,ATP-B 车进入IG 停车。当S1 →S3 多列车进路已办理,地面设备为ATP-A 计算行车许可时,判断S1 →S3 进路为多列车进路且进路开放,ATP-B 当前速度为0 km/h,考虑ATP-A 列车与ATP-B 列车安全追踪间隔,计算ATP-A 列车停车点为SA,SA点距离ATP-B 列车尾部保持一定安全距离。ATP-A列车追踪点为TA,根据ATP-A 当前列车速度及制动模型以SA停车点为目标点,计算一次制动曲线制动点为BA。

图2 进站接车时行车许可计算示意图Fig.2 Schematic diagram of movement authority calculation when receiving the train enters station
2.3 出站发车
如图3 所示,列车出站时根据前车速度信息计算本列车行车许可。ATP-C 在区间以120 km/h 速度行驶,列车前方至进站S 信号机处空闲,S 信号机禁止信号,计算ATP-C 列车行车许可停车点SC为S 信号机处,根据ATP-C 制动模型计算以SC点为目标点的一次制动曲线制动点BC。
ATP-B 列车出站发车,当前速度45 km/h,列车前方至ATP-C 列车处空闲,计算ATP-B 列车行车许可停车点SB,SB停车点距离S 信号机间隔ATP-C 车长并回缩安全距离。根据ATP-B 制动模型计算以SC为终点的一次制动曲线制动点BB。计算与ATP-C 列车追踪点为TB,TB追踪点为距离ATP-C 列车当前尾部保持安全距离,且ATP-B 在TB追踪点的目标速度与ATP-C 速度一致。
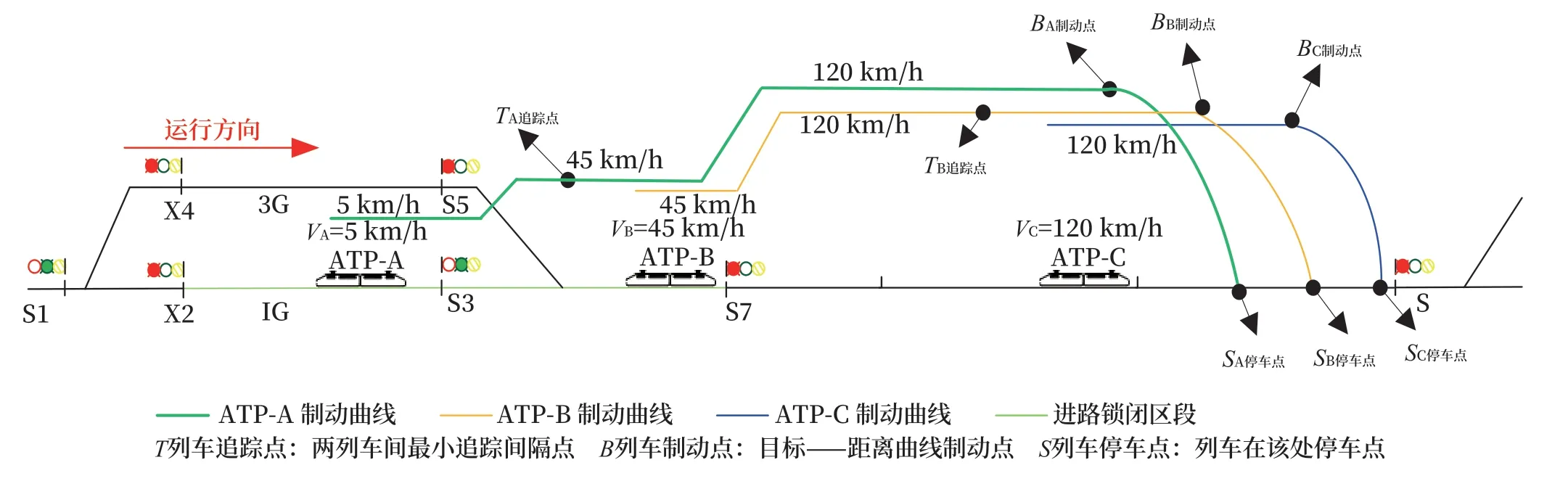
图3 出站发车时行车许可计算示意图Fig.3 Schematic diagram of movement authority calculation when the train leaves the station
为S3 →S7 办理多列车进路,且S3 信号机开放允许信号,ATP-A 当前速度为5 km/h,列车前方至S 信号机间有同向运行ATP-B 列车及ATP-C列车,计算ATP-A 行车许可停车点SA,SA停车点距离S 信号机间隔ATP-C+ATP-B 列车车长并回缩安全距离。根据ATP-A 制动模型计算以SA为终点的一次制动曲线制动点BA。计算与ATP-B 列车追踪点为TA,TA追踪点为距离ATP-B 列车当前尾部保持安全距离,且ATP-A 在TA追踪点的目标速度与ATP-B 速度一致。
3 关键点计算
列车停车点计算:
列车停车点S停车点计算是根据S禁止点(列车车头不可越过的点),及L安全距离(考虑列车定位、速传等列车位置采集设备引起的误差,根据列车提供误差系数,取最大值),算出行车许可的终点。

列车制动点计算:
列车制动点B制动点计算是以S停车点为行车许可计算终点,考虑车载设备与地面设备最大通信延伸情况(本模型以地面设备计算行车许可再通过无线传输方式发送给列车为假定),以及ATP 向列车输出制动指令列车响应时间情况下,列车以输出最大制动行驶距离计算制动点。

列车追踪点计算:T追踪点计算是以前车车尾点为目标点,考虑前车最大退行距离及前车当前速度,在后车到达T追踪点时,当前列车与前车速度必须一致。若前车速度为0 km/h 时,T追踪点与S停车点同一点。

4 性能比较
4.1 追踪距离比较
同一列车在相同速度、相同制动模型,不同计算行车许可方法情况下的追踪距离比较(本计算模型以车载定位准确无误,车地无线通信延时在假定范围内,且各设备间输出结果准确无误为前提)。
以前方列车尾部为目标停车点,追踪距离为:

如表1 所示,两种计算行车许可模型下列车追踪间隔比较,融合前车位置、速度、牵引、制动等信息的行车许可计算方法的列车追踪距离更短。

表1 两种行车许可计算方法下的追踪距离比较Tab.1 Comparison of tracking distance between two types of movement authority calculation methods
4.2 追踪间隔比较
同一列车在相同速度、相同制动模型,不同计算行车许可方法情况下的追踪间隔比较如下。
以列车尾部为目标停车点,追踪间隔为:

融合前车列车速度的列车追踪间隔为:

如表2 所示,两种计算行车许可模型下列车追踪间隔比较,两者相比,融合前车位置、速度、牵引、制动等信息的行车许可计算方法的列车追踪间隔更短。

表2 两种行车许可计算方法下的追踪间隔比较Tab.2 Comparison of tracking time between two types of movement authority calculation methods
5 结束语
基于列车速度的行车许可计算方法较以前车尾部作为停车点的行车许可计算方法,通过融合前车位置、速度、牵引、制动等信息计算行车许可,大大缩短了列车追踪距离及追踪间隔,进而提高移动闭塞系统的运输性能,为深度挖掘线路运输潜力提供理论依据,但该模型是基于设备可靠输出,设备间低延时传输,且列车定位精准,制动性能无衰减等理想情况下计算出的理论结果,在实际运过程中还需根据实际情况进行调整。