便携式助力轮椅相关设计
2020-07-04李玉麟
李玉麟


摘 要:随着我国人口老龄化进程逐渐加快以及肢体残疾人数量逐渐增多,对辅助步行工具的需求也就日益提高,而轮椅作为代步工具可以有效的帮助他们提高行动自由度以及融入社会。
关键词:助力轮椅; 折叠
目前生活中普遍流行的轮椅,功能较为单一,一个轮椅不能满足患者的绝大部分需求,因此并不能很好地满足下肢残障患者的使用需求。与此同时科技也在不断发展,而老年人和残障人士的自由活动能力和康复训练由于器械原因依然被严重限制,因此他们对辅助代步工具的需求和要求日益提高,同时在国家号召创建和谐社会,关爱弱势群体的大背景下,新的轮椅的出现已经成为了必然的趋势,而具有代步与康复训练功能为一体的便携式轮椅,不仅能够辅助患者完成康复训练,还能够满足患者长距离行动的需求,可以更好的扩展和方便残障人士的活动领域和空间,同时此轮椅便携可折叠,所占空间小重量轻,对残障人士克服病患及改变生活质量具有极其重大的意义。如今中国社会,老龄化越来越严重,残疾率也高居不下,轮椅已成为老年人及行走不便者生活中的必须工具,借助轮椅他们能够进行各种社会活动。目前无论乡镇还是城市无一不在飞速发展,其中阶梯更是基本设施之一,如登越人行天桥和地下通道需要穿越楼梯等。然而目前最常用的是只可平地行走的普通轮椅和智能轮椅,普通轮椅爬楼不便,智能轮椅价格又过高,很难满足广大普通老百姓的需求。在这种情况下,本文设计了一种便携式助力轮椅,而且因为其智能化程度相对低,因此价随之下降,从而能够满足大多数使用者的承受能力,同时还保证了轮椅具有良好的功能。
国内两种主流轮椅的弊端以及未来发展趋势
1.主流的两种轮椅弊端
电动轮椅,虽然减轻了残障患者的体力活动强度,可以满足长距离行走的需要;但搭载其他交通工具时,由于体积和重量过大,因此带来很多行动不方便的地方。轮椅对搭载车辆时的上下移动,也不是用人力能够完成的。目前的做法,是在车辆上配置机械手,像吊车一样吊起和放下,这使得它同样缺乏便捷灵活的特征。
使用传统轮椅时,残疾患者在进行康复训练时,需要更换设备,康复患者很难自行完成,同时患者需要承担很多额外的花销,这时如果有一部,小巧轻便的,能能够兼具代步与训练功能的轮椅的轮椅,且方便残疾患者自己可以移动,自行完成康复训练,无疑会给下肢残障人士的生活带来质量的改变。
2.中国轮椅未来的发展趋势
1便携性:人们越来越多地接受了轮椅作为代步工具的基本理念。随着现代制造业业的蓬勃发展和人们生活需求的提高,残疾人出行的愿望也越来越强烈。因为需要大量驾车出行因此对轮椅的需求朝着更加便携的方向快速发展。
2功能性:轮椅乘坐者的身体状况千差万别,不同状况的乘坐者需要不同的轮椅,随着康复护理理念的提升,将推动轮椅向攻能性发展,这将为广大的乘坐者和护理人员提供更加安全、舒适、便捷的使用体验。
3个性化:为了更好地满足不同乘坐者的需求,个性化的定制轮椅将会不断发展。由于我国专业人员的缺乏和个性轮椅制定成本的高昂,限制了我国一对一定制轮椅的发展,更加适合中国国情的是针对某一类人群一对多的定制轮椅方案。
4电动化:随着社会的发展进步,人们生活水平的提高,行走困难的人士长距离出行的需求不断增长。需要更对方便地进行长距离驱动的代步工具,势必带动电动轮椅的发展。
5智能化:随着社会的发展和人类文明程度的提高,老年人和残疾人,尤其是一些丧失上肢运动能力的残疾人,愈来愈需要运用现代高新技术来改善他们的生活质量和自由度,这也将推动轮椅逐步智能化的发展。
纵观轮椅在不同国家以及地区的发展变迁史,从功能、结构、尺寸、款型上体现出极为明显的区域特点,怎样根据乘坐习惯、中国人的体型、使用环境、路面状况以及消费的能力,让我们为老年人以及残障人士提供更加合适的轮椅,这都是需要我们思考的。
为了能使各种与人体有关的设计能与人的生理特点相符合,让人在使用輪椅的时候能够处于舒适的状态和合适的环境之中,我们在设计时有必要把人体的尺寸考虑进去,人体尺寸是我们设计者确定我们产品尺寸的重要依据之一。我们身为便携式助力轮椅的设计者必须充分了解人体各部位的尺寸。只有通过这种方式,才能预先确定便携式助力轮椅的使用者在轮椅的有关位置上的能见范围和活动范围。所以,也就要求我们设计者必须了解一些关于人体测量学的基本知识,并要求我们熟悉掌握有关设计所必要的人体测量的基本尺寸数据和使用的条件。
轮椅的结构以及设计
1.简要介绍
一种用于辅助下肢残章患者行动与康复治疗的便携式助力轮椅,具有助力功能、代步功能以及可以折叠的便携功能。轮椅上端握把可旋转,握把处有一对压力传感器,可以检测使用者是否处于握紧状态情况,并控制轮子转动,辅助患者进行康复训练并保证患者的安全;轮椅的右侧扶手处安装有摇杆控制装置,患者可以轻松地通过摇杆控制轮椅的移动方向,实现代步的功能;产品整体可以通过折叠收缩改变轮椅的外形尺寸,达到轮椅携带便捷、节省空间的目的。
多功能折叠式助力代步轮椅,包括柱承重轮子5和导向轮子6,其特征在于:(1)该轮椅还包括靠背1、座位2 、支架12和支撑杆21,支架12和支撑杆21分为左右两组,每组中的支架12和支撑杆21均通过支点102活动连接。
(2)靠背1和座位2均为能以中线折叠的折叠结构,靠背1的左右两侧设置在左右两个支架12之间,座位2设置在左右两个支撑杆21之间。
(3)座位2的底部设置有X形支架,X形支架包括两个底部支撑杆9,两个底部支撑杆9交叉,两个底部支撑杆9能以该交叉点为轴转动形成活动的X形结构。
(4)两个底部支撑杆9的上端支撑座位2的左右两侧,两个底部支撑杆9的底端通过可旋转支撑座91改变角度。
(5)支撑杆21的侧方还设置有用于支撑横向手扶支撑杆7的定位卡座 8。
轮椅使用时,支架12与支架21依靠支点102旋转调整至预先设定好的位置,定位杆9调整至预先设定好的角度,在支撑座91的支撑下,轮椅即进入稳定的使用状态如图1所示。
轮椅使用电力驱动并通过手动摇杆71控制方向驱动轮6控制轮椅的移动方向,实现代步的功能。
当患者需要进行康复训练时,将握把3依靠可旋转支架32旋转180度;支撑杆12与支撑杆21依靠支点102调整至预先设定好的角度,依靠卡座8将扶手支撑杆7位置锁定;将踏板4依靠可旋转支点41向上旋转90度;此时,轮椅进入辅助康复训练的使用状态如图2所示。
其中,握把3部分安装有电容感应开关33,可以通过检测控制握把3处的触摸情况,控制轮子6转动,辅助患者完成康复训练。当患者手部离开时,轮子6停止转动,以保证患者的安全。刹车装置31,可用于紧急情况时患者自主对轮椅进行制动,以保护患者的安全。
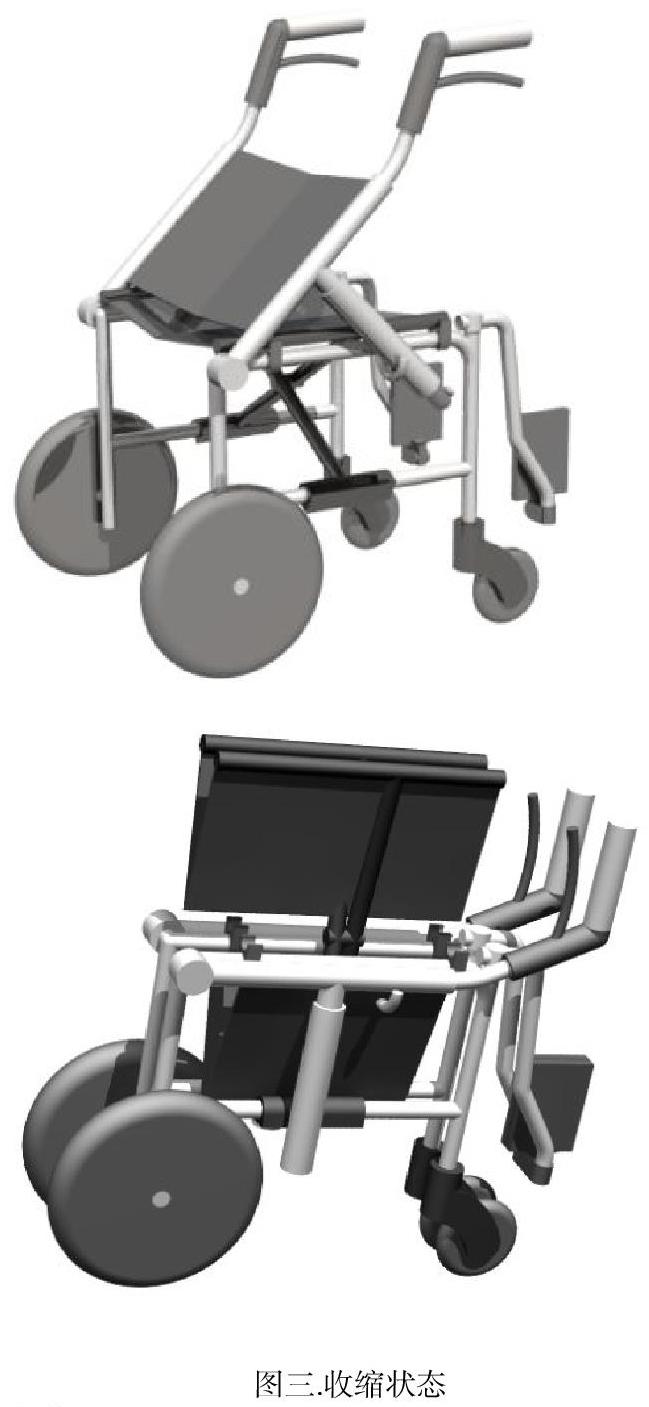
当使用者完成康复训练需要放置时,解除卡座8与扶手支撑杆杆7之间的锁死,将卡座8向内旋转90度。靠背1向座位2并拢,依靠支点102完成并拢动作;当支撑杆7与地面完全垂直后,将轮椅沿靠背折叠处11与座位折叠处22向中间折叠,底部支撑杆9支撑起椅背折叠处11与座位折叠处22,依靠可旋转支撑座91完成折叠动作。支架72内部具有凹槽,遥杆71可收缩至凹槽内,支架72可收缩至扶手支架7内部,当轮椅处于折疊状态时可以起到保护遥杆的作用。如图3。
2.产品制作及原理
(1)助力系统组成及运动原理
助力轮椅车驱动系统通过力觉传感器系统探测使用者通过手推轮给系统的初始力大小、速度大小综合控制直流驱动电机的输出功率,经过一定的运算处理后,由控制器产生 PWM 波形控制直流驱动电机,合理调整直流驱动电机的输出功率,实现对轮椅的综合驱动[2]。轮椅的助力驱动系统相关原理的示意图如下图图 4 所示:
左轮和右轮由独立驱动系统分别进行进行驱动,当 F1与F2相同时,轮椅处于直行状态;当 F1大于F2时,轮椅进行右转;当 F1小于F2时,轮椅进行左转;F1和 F2始终都拥有一个向前的合力 F。
为了更好的实现轮椅的助力功能,整个系统由以下的几个模块构成:信号处理与中心控制模块、力觉传感模块、动力驱动模块、轮速采集模块。系统的原理框图如下图 3 所示。
[4]力觉传感系统的主要方式[1-5]:(1)为便于采集使用者作用于手推轮的力矩。因为有 F=ma,加速度正比于手所施加的力,因此我们可以通过采集加速度来替代力的采集。最后我们选取了角加速度传感器作为实时采集使用者推动轮椅产生的加速度的仪器,角加速度传感器和轮椅助力驱动系统中的直流驱动电机连接在一起,并以此来实现同步运转。同时将实时采集的加速度的变化作为系统的输入信号(2)采用扭矩传感器来直接采集使用者作用于手推轮上的力,通过传送器将信号传送至信号处理中心进行进一步的处理,从而实现了力觉采集(3)我们将采用角度传感器把手推轮相对车轮的偏转角度作为使用者的施力信号来进行数据的采集,并且通过传送器传送到信号处理中心进行运算处理,以此来实现力觉数据采集采集(4)我们可以通过压力传感器来采集手推轮相对于车轮偏转的时候作用于轮毂内的力来作为使用者的施力信号来进行数据采集。并且将数据通过传送器传送到信号处理中心来进行处理,以此来实现力觉采集。当轮速采集系统将速度采集并且传送到计算机之后,这些速度数据会被传输到基于 Lab VIEW 的便携式助力轮椅的智能检测及控制系统进行显示,分析以及处理,同时轮椅还会实时监控轮椅车的运行速度并以此来确保安全,当轮速超过 10km/h 时,轮椅会自行启动保护程序,并对轮椅进行降速处理来确保乘坐人的安全。
(2)电动部分原理纲要
控制电路主要由液晶显示、蓄电池、操纵杆、主控制器、直流电机及驱动模块、转向灯、电池电压检测电路等共同组成。操作操纵杆任意方向运动都将会生成两路幅值大小不同、极性不同的模拟电压信号。这两路模拟电压信号将会通过信号调节电路后直接接入两路高精度模数转换并且同时进行转换。主控制器将会实时采集这两路的模拟电压信号并且按照已设定好的路径规划程序来进行数据运算和处理,并且再将它转化为电机驱动信号。并分别给左右两电机驱动电路不同的驱动电压信号和不同的方向信号,从而使得两电机的转向和转速相同或者不同。以此达到驱使轮椅进行转向、后退、前进等各种运动模式的要求。为了保障使用轮椅的安全,我们特别设计了转向灯以及喇机电路,还有电压检测电路等。主控制器对行车速度和蓄电池电压进行实时检测,并通过显示当前车速和剩余电量来把信息传递给使用者使其更好的利用轮椅。
结束语
随着近年来人们的收入增加,消费水品逐渐提高,使得我们对更高的生活质量有了一定的要求。而本文设计的便携式助力轮椅对老年人以及残障人群的生活质量的提高有着非常大的帮助。本文的设计主要是博采众长,将多种轮椅的特点以及优势融于一体,这使得我们在尽量减少成本以及维护费用的情况下,还可以让老人以及残障人士的需求有多方面的满足。它将是这类人群的最好伴侣,同时通过多种传感器的控制以及计算可以使轮椅保证老人以及残障人群的出行,对整个社会的持续性健康发展来说,有很重要的意义。
参考文献:
[1]白大鹏,多功能助行机器人机构研究[D].哈尔滨:哈尔滨工程大学,2013.
[2]伊蕾,助行康复机器人控制策略研究[D].哈尔滨:哈尔滨工程大学.2012.
[3]夏振涛,助行训练机器人系统设计及步态控制实验研究[D].哈尔滨:哈尔滨工程大学.2009
[4]李倩.6万名残疾人老年人康复训练试点项目启动[N].内蒙古日报,2012-09-06.
[5]赵建玲. 中国老年残疾人现状与长期照护制度探索[J]. 中国老年学, 2014(10):2907-2910.
[6]陈昫. 我国老年残疾人的家庭长期照护体系研究——以北京市老年残疾人为例[J]. 理论月刊,
[7]曾翔. 面向助老助残的智能轮椅开发[D]. 上海交通大学, 2007.
[8]项仁明. 针对残障人士出行方式的设计研究[D]. 北京理工大学, 2015.
