基于RANS方法的NACA0009水翼梢隙涡数值模拟
2020-07-02万初瑞王建强
万初瑞 严 鹏 王建强
(1.喷水推进技术重点实验室 上海200011;2.中国船舶及海洋工程设计研究院 上海200011)
引 言
梢隙涡是由于水翼稍部压力面和吸力面压差存在而产生的。在一些水翼、压缩机、火箭推进器及喷水推进器都存在。但梢隙涡存在容易诱发空泡,可能引起空蚀、流动不稳定和噪声等问题[1]。一些学者已经通过PIV方法对梢隙涡进行了试验研究[2-3]。DREYER测量了NACA0009下游不同间隙的无空泡速度场,这些测量结果总结了间隙对于间隙涡的影响,总体来说,间隙宽度直接对涡内部流动产生影响。当的时候,梢隙涡环量达到峰值,因此应该避免这种情况进而降低空蚀发生风险。把空泡作为显示媒介,在间隙中能够发现两条涡结构。梢隙涡从吸力面导边生成,而分离涡则在间隙中生成。分离涡移动到上游并且与梢隙涡合并,合并位置与间隙的大小有关。间隙越小,两个涡结构越早合并,并且随着间隙增大,分离涡强度逐步降低。一些学者采用RANS数值法及LES方法模拟了相应过程[4-6],数值结果同样显示,除了梢隙涡外,可能存在不止一个分离涡结构。在本文中,采用NACA0009翼型,间隙为固定值。
对于非空泡工况,研究了四种湍流模式对尾流涡结构影响规律。数值与试验对比结果显示,RANS方法可以较为准确的捕捉平均流动。空泡工况采用SST 湍流模式计算,分析了空泡对尾流涡结构影响。
1 计算方法
1.1 控制方程
对于多相流模型,连续性方程和动量方程如下:

混合密度和粘度系数定义如下:

式中:α是蒸汽体积分数,下标m、v和l分别为混合、蒸汽及液体相。
1.2 数值方法
数值模型通过STARCCM+商用软件模拟求解。控制方程为雷诺平均N-S方程,流体为不可压缩。对方程的离散采用有限体积法,离散精度为二阶,采用的算法为全隐式多网格耦合算法。
1.3 湍流模式
引入Boussinesq假设后,只要能够确定μt,就可使RANS方程封闭。经过不同的模型简化将μt与湍流流动中的时均参数联系起来即可得到不同的湍流模型。依据确定μt的微分方程数目的多少,湍流模型可分成零方程模型、一方程模型和二方程模型。本文使用湍流模型是两方程模型,分别为标准k-ε,可实现k-ε、标准k-ω和SSTk-ω模型。
1.4 空泡模型
自然空化的一个显著特征是气液两相的质量交换,需建立空化模型即描述该质量交换的数学模型。基于相间质量输运的空化模型添加了合适的源项,对质量或体积分数采用输运方程来控制气液两相之间的质量输运过程,使得方程具有对流特性。本文采用此类空化建模方法:

式中:下标v代表汽相,α代表汽相体积分数,ρv为汽相密度,kg/m3;为汽相速度,m/s。方程右端源项决定汽相的产生和转移,Re和Rc为气泡的生长和溃灭有关的质量传输源项。
本文采用的Schnerr和Sauer模型[7]的形式为:
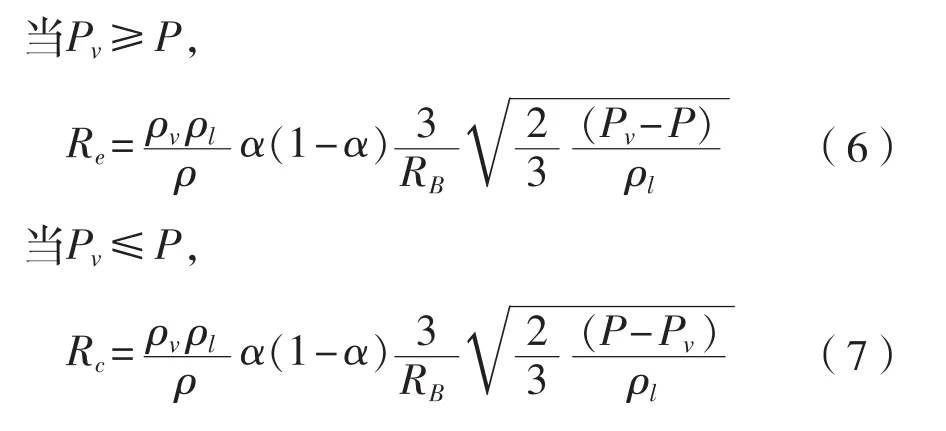
这里,汽泡半径RB表达式为:

式中:nb为汽泡数值密度。
1.5 计算对象
计算对象为NACA0009水翼,水翼的表达式如下,其中弦长c0= 0.110 m,水翼在c= 0.1 m处截断,水翼展长0.150 m, 最大厚度h= 0.009 9 m。本文中特征长度取c= 0.1 m。

式中 :a0= 0.173 7,a1= -0.242 2,a2= 0.304 0,a3=-0.265 7,b0= 0.000 4,b1= 0.173 7,b2= -0.189 8,b3=0.038 7。
1.6 计算域及网格划分
计算域尺度为 0.15×0.15×0.750 m3,坐标轴及计算域如图1所示。水翼攻角为10°,间隙τ= 0.01 m。其中上游距离前缘2c,下游为5c, 压 力P= 1 bar(1 bar = 0.1 MPa), 来 流 速 度U∞= 10.2 m/s。x方向坐标零点位于水翼厚度最大处,y轴坐标原点位于最大厚度中心处,z轴坐标原点位于有间隙的壁面位置。

图1 计算域
根据平板湍流边界层理论,估算边界层厚度为6 mm,对应y+= 30的首层边界层厚度为0.07 mm。间隙及下游涡管通过控制体加密,总网格数量210万。Z= 0.02 m平面网格划分见图2。

图2 网格划分
2 计算结果及其分析
2.1 无空泡工况
计算中来流速度uinlet=10.2 m/s,Poutlet=1 bar,特征长度lref=c= 0.1 m,取下游x/c= 1,x/c= 1.2,x/c= 1.5三个位置处截面涡结构对比分析。下页表1、表2和表3分别给出了流向不同位置涡心坐标值,涡心位置为轴向涡量ωX最大值处,周向y轴,展向为z轴。偏差δ表达式如下所示,其中试验值来自于DREYER[3]。通过四种湍流模式比较可以发现SSTk-ω两方程模型相对误差最小,除了轴向x/c= 1.5处轴向误差大于15%外,其他位置计算偏差都小于5%。这表明采用RANS方法计算涡心位置有着相当高的精度。后文展示图片皆为SSTk-ω计算结果。

表1 不同湍流模式涡心位置与试验偏差(x / c = 1)
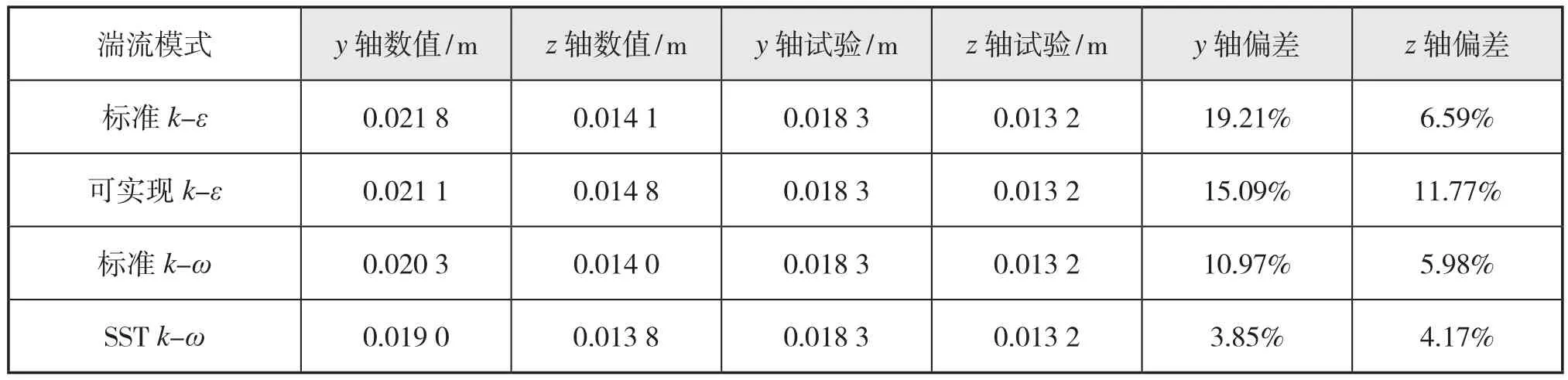
表2 不同湍流模式涡心位置与试验偏差(x / c = 1.2)

表3 不同湍流模式涡心位置与试验偏差(x / c = 1.5)

图3为涡量等值面图,通过观察可以发现间隙附近涡结构主要由两部分组成,即由梢部吸力面生成的梢隙涡以及在间隙部分生成的分离涡组成。分离涡在水翼的压力面形成,然后通过壁面间隙移动到吸力面。两个涡结构在吸力面上方弦长3/4位置处卷曲形成一条涡管。

图3 涡量等值面图
下页图4(a)给出了x/c= 1处轴向涡量ωX云图,图中红色中心位置定义为涡心。通过涡量分布图,可以发现涡结构内部涡量梯度较小,可能是过高的耗散导致这一现象。作者尝试提高涡心附近的网格密度,但对涡量分布梯度变化影响较小。虽然涡心位置相对准确,但轴向涡量梯度问题值得进一步研究。梯度图4(b)(c)(d)给出x/c= 1处不同方向流速云图,通过观察可以发现,涡心位置流向速度较高,整个涡结构呈逆时针旋转。

图4 x/c=1处涡量、速度云图
2.2 空泡工况
空泡工况计算条件为uinlet= 10.2 m/s,Poutlet= 0.7 bar,网格与无空泡工况一致,湍流模式为SSTk-ω。求解空泡等多相流问题,商用软件采用欧拉多相流模型中的流体域体积(VOF)模型。空化涉及水的汽化和液化相变过程,需进一步应用VOF多相相互作用模型和Schnerr-Sauer空化模型模拟。本次数值模拟过程中,饱和蒸气压为2 338 Pa。

图5 空泡计算结果,空泡数

表4 空泡中心与无空泡涡心位置比较
图5给出了梢隙涡空泡计算结果,其中等值面为水体积分数αl= 0.5。数值结果较好的模拟了空泡分布,整体趋势与试验一致。但是,数值结果相比于试验结果,梢隙涡导致的空泡不明显,而分离涡则较好的捕捉到间隙中的空泡。总体来说,数值结果空泡分布偏少,并且空泡出现间断,对于涡核附近的压力降捕捉不够准确,结合无空泡数值结果,分析主要原因在于数值方法耗散过大。下页表4给出了有空泡及无空泡流向下游不同截面位置偏差,数值结果表明空泡中心位置与涡心位置偏差较小,空泡的产生使得涡心周向位置靠近吸力面,展向位置偏向壁面。
3 结 语
本文研究了翼梢和壁面间的梢隙涡结构,包括有空泡及无空泡两种工况,间隙为10%弦长,攻角10°。对于无空泡工况,对比了4种湍流模式计算精度,结果显示SSTk-ω捕捉涡结构具有较高的精度。计算结果较好地模拟了间隙涡及分离涡结构。有空泡工况显示,空泡的存在使得涡结构更加贴近吸力面及壁面,但是与无空泡涡心位置偏差不大。在一些不方便直接测量试验工况中,可以通过降低压力产生空泡方法提供涡结果位置示踪功能。在数值计算过程中,可能由于数值耗散原因导致涡核内部涡量梯度分布较为均匀,进一步引起空泡状态压力降不够、梢隙涡不明显、空泡出现间断,此现象值得进一步研究。
