湖泊环境下的水声目标检测的标志性特征
2020-06-29江均均肖仲喆
江均均,黄 敏,肖仲喆
(苏州大学 光电科学与工程学院,江苏 苏州 215006)
舰船航行过程中产生的低频声音信号是对其进行检测和定位的重要信息来源.然而,水声目标的声音信号通常由于所处的环境复杂多变而被能量远高于目标信号的噪声所淹没,使得对于是否存在舰船等目标的检测变得十分困难.水声目标检测是实现水下装备系统智能化的重要支撑技术,其关键是从被强噪声淹没的信号中提取出表征水声目标特性的标志性特征.标志性特征一般应具备以下4个方面的特性: 良好的类间可分性、有明确物理含义和较强的泛化能力、对目标运动工况具有一定的不变性以及对水声环境具有良好的宽容性等[1].国内外学者们提出了多种水声目标检测的方法,提取了各种形式的特征,如提取水声目标信号的经典听觉感知梅尔频率倒谱系数(Mel Frequency Cepstrum Coefficients, MFCC)特征,包括1阶差分MFCC和2阶差分MFCC,并利用监督学习方法进行分类识别[2-3];采用集成经验模态分解(Ensemble Empirical Mode Decomposition, EEMD)和希尔伯特-黄变换提取目标信号的最强本征模函数的中心频率、高低频之间的能量差和瞬时能量变化范围[4];根据卡尔曼滤波理论和最大似然估计法提取水声目标辐射噪声的基频和各阶谐波的特征[5];利用深度神经网络直接提取目标信号的深度特征[6-7];提取水声目标信号的近似熵、模糊熵和样本熵这3种非线性特征,输入到机器学习模型中进行识别[8].虽然基于这些特征的方法在相应测试数据上有不错的表现,但由于实验数据少,泛化能力不强,其中部分方法依赖于仿真数据,并非一定适用于真实数据,且其抗干扰能力弱.
针对以上问题,本文以某研究所采集的湖泊环境下的水声目标信号实测数据为基础,对水声目标信号的特性进行了分析,提取了若干能够表征水声目标特性的标志性特征,并通过机器学习方法对这些标志性特征的性能进行了验证.
1 水声目标信号的接收与标志性特征的提取
舰船在水面或水下运行时,会产生若干个近似于单频音的低频声音信号,其在不同方向发出的声音的频率响应相同,不过受船身的遮蔽效应影响,不同方向实际接收到的声音信号会略有差异.对这类信号的自动检测能够及时发现附近水域是否出现运动中的舰船等目标,从而可以对舰船的距离、类型等进行判别.然而,由于风浪等引起的水体自身震荡,来往其他船只的干扰等因素,水声目标信号通常都伴随有各种形式的噪声和干扰,且这些干扰因素往往随着时间会发生显著的变化,给水声目标的自动检测造成了极大的困难.本文提取能够表征水声目标特性的若干标志性特征,并通过机器学习算法对这些标志性特征的性能进行验证的基本流程如图1所示.
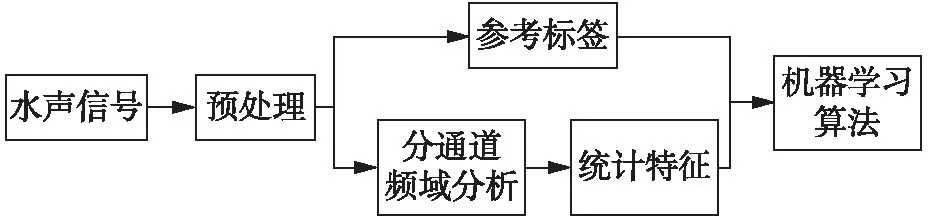
图1 水声目标信号的标志性特征提取与 基于机器学习的验证流程Fig.1 Process chart of signature feature extraction of underwater acoustic target signal and verification by machine learning
1.1 数据样本描述与预处理
本文实验中采用的水声目标数据样本来源于某研究所在某湖泊试验场采集的数据,使用两条不同方向的航道,主航道上水深50m以上,试验场中的主要干扰源包括: 1) 基地处实验干扰(来自基地处其他实验团队所做实验);2) 来往船只干扰;3) 环境噪声.实验的目标是检测任意1种舰船等水声目标,因此本文使用主动声源模拟了多种水声目标所发出的运行低频声,通过对主动声源信号检测的研究来实现对任意1种水声目标的检测.主动声源共设定5种不同的模式,代表5种不同的目标(A、B、C、D、E),每种目标设定5个频率的低频线谱,线谱频率分布在100Hz到530Hz之间,其中,目标A、B、C两两之间有2条相同线谱,目标C、D、E的所有线谱各不相同.主动声源模拟的信号和真实信号都是线谱,都有若干个,频率也都在100Hz到600Hz之间,两者的区别主要为真实信号在舰船减速时频率会渐变,不会中断几秒,在同样的距离上,真实信号较模拟信号略弱,因此使用主动声源模拟的5个单频音可以较真实地还原真实舰船发出的水声信号.为保证实验设备在实验过程中保持良好工况,信号的占空比设置为0.625,发射信号具体形式为发5s,停3s,5类线谱轮流发射,1个周期的信号长度为40s.水声目标的辐射信号的频率最高为几千赫兹,由于数据采集设备的限制,我们选择17067Hz的采样频率,可以满足采样要求.
声源所发射的线谱信号通过16元潜标垂直阵进行接收,接收器垂直阵悬挂于固定位置的测量基地.本文实验选用了声源发射器与信号接收器之间的两种不同位置的信号作为数据样本.情况1: 声源发射器也悬挂于测量基地,采集声源在静止时候的信号.情况2: 声源发射器以某一固定深度悬挂于某船只下方,船只在航道内进行航行,采集声源在移动时候的信号.
由于各种干扰因素的存在,接收器采集到的数据会被干扰信号所淹没.在船只航行状态下实际采集的数据中1段20s长的单一通道的数据片段如图2所示.
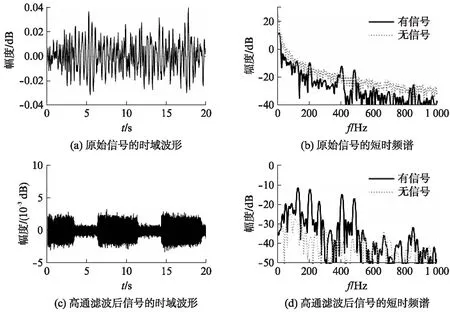
图2 接收信号的样本Fig.2 Sample of received signal灰色虚线为线谱发射间隙时的信号,黑色实线为线谱发射过程中的信号.
图2(a)为原始信号的时域波形,可见由于强干扰信号的存在,时域波形表现为类似于噪声的特性,没有明显规律.图2(b)为原始信号的短时频谱,其中: 灰色虚线为线谱发射间隙的信号情况(标注为无信号),黑色实线为线谱发射期间的信号情况(标注为有信号).尽管在这一频谱对比图中,能够发现线谱发射时的若干个线谱谱峰,但数据中明显存在低频(低于100Hz)的噪声,且幅度显著高于各线谱.为了去除这一背景噪声,我们采用高通滤波信号预处理以减少低频噪声的干扰,具体滤波过程选用3阶椭圆滤波器,高通截止频率设为100Hz.滤波后的时域波形如图2(c)所示,可见滤波后的幅度在线谱发射时和发射间隙之间出现了明显的幅度对比.滤波后的信号短时频谱如图2(d)所示,标注同图2(b),可见无论有无线谱发射,信号频谱都具有类似的背景走向,而当有线谱发射时,频谱中会根据所在时刻发射的线谱模式出现明显的谱峰.
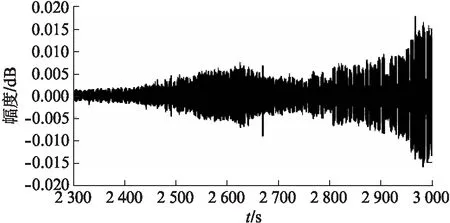
图3 高通滤波后的长时间信号的时域波形Fig.3 Time domain waveform of high-pass filtered signal on long time scale
然而,由于干扰会随着时间推移发生显著变化,利用图2所示的时域信号幅度差异或者时域幅度突变信息并不足以作为自动判断是否处于线谱发射期间的依据.图3所示为从1段连续信号中截取的自2300s 至3000s的持续时长为700s的长片段.由图示信号可见,2300s至2400s之间信号整体具有较低幅度,而后信号幅度明显增强,2800s 之后的线谱间隙幅度甚至高于2300s时有线谱发射的幅度,而有/无线谱发射时幅度差异也随着时间呈现显著变化,没有表现出明确规律.
为更清晰地显示线谱模式,图4(a)中显示了图2(a)的20s数据的声谱图,这段数据所受的干扰较小,由图中可见,在线谱发射期间能看到5条水平条纹,在线谱发射间隙则不存在对应的线谱条纹,而条纹位置与所发射的线谱模式对应.图4(b)为滤波后的信号的声谱图,线谱条纹比滤波前的原始信号更加清晰.当环境发生变化时,较强的干扰会使线谱条纹的清晰程度严重下降,如图4(c)所示,线谱发射期间的条纹与背景间的对比很弱,且在某些频率位置出现了较持续的干扰条纹(例如图中110Hz附近、210Hz附近),而干扰条纹是否存在,干扰条纹数量、频率、持续时间等均随机.
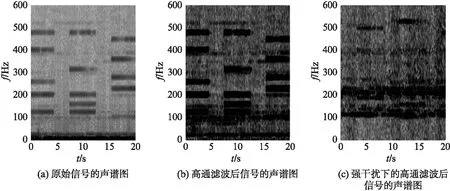
图4 接收信号的声谱图Fig.4 Spectrogram of received signal
在这种情况下,提取能够有效地表征线谱是否存在的水声目标信号的特征则成为了能够以较小的计算复杂度实现对水声目标信号检测的关键问题之一.
1.2 提取标志性特征
我们的目标是使用数量很少、计算复杂度低的特征实现对水声目标的检测.无论是舰船行驶自然形成的水声信号,还是所采集的线谱声源,均表现为若干条频率为几百赫兹的线谱.频谱特性将成为区分线谱是否存在的重要表征.我们选取了表征频谱特性的5个基本特性进行研究.线谱发射期间与线谱发射间隙信号的短时频谱如图5所示.
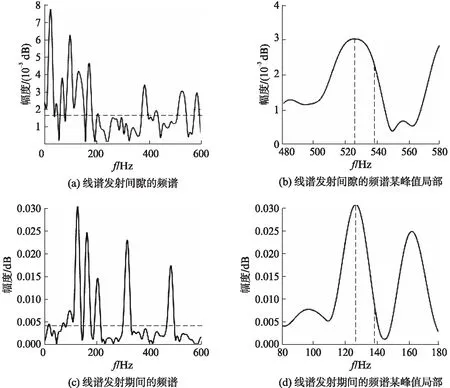
图5 信号的短时频谱Fig.5 Short time spectrum of signal
1.2.1 频谱全局分析
图5(a)与(c)分别为线谱声源发射间隙与发射期间的短时频谱,图中的点划线为频谱幅度均值.两者均体现出幅度不同的若干个谱峰.比较两图可知: 在线谱发射间隙,即线谱不存在时,频谱幅度较高的情况大多集中在频率低于200Hz的频段;在线谱发射期间,即线谱存在时,由于存在若干条线谱,频率较低处的背景幅度相对于线谱而言明显较低,而在高于200Hz部分也会存在若干条谱线.针对声源发射的信号在线谱发射期间包含5个线谱频率的情况,我们对信号频谱选取其最高的5个谱峰,谱峰频率记为fp(i),i=1,2,…,5,对应的各谱峰幅度记为Ap(i),i=1,2,…,5.定义谱峰重心为
(1)
谱峰重心即为表征频谱特性的基本特性1(B1).
由图5(a),(c)中的频谱均值线可见,由于线谱数量不多且谱线很窄,线谱的存在对于频谱幅度均值的影响较小,然而线谱幅度相对于频谱背景幅度显著增高,因此,线谱存在时,频谱最大值与频谱均值的比值会显著高于线谱不存在时的情况.这一比值作为表征频谱特性的基本特性2(B2),如下所示:
(2)
其中mF为频谱均值.基本特性1,2可视为频谱的全局特性.
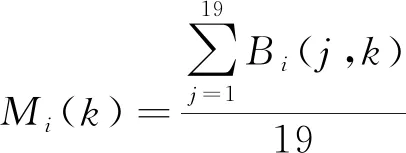
1.2.2 频谱局部特性分析
基本特性3,4,5为频谱的局部特性,用于描述局部某个单一谱峰的局部特性.如图5(b),(d)所示,分别为无线谱与有线谱时的某谱峰的局部频谱.图中各标示两条虚线纵线,左侧虚线为谱峰位置,右侧虚线为从谱峰位置提升某一固定频率的位置,图示频移为12.5Hz.当谱峰如图5(b)所示较宽时,两个频率点处的幅度比值较小,而当谱峰如图5(d)所示较窄时,两个频率点处的幅度比值较大,定义其为峰侧比:
(3)
其中: Δf为从谱峰位置的频率提升值;F(fp(i)+Δf)为第i个谱峰频率提升Δf处的频谱幅度.当线谱存在时,全局分析时所提取的5个最高谱峰均为线谱处的窄峰,因此,5个峰值处的峰侧比均为较大数值,且5个值较为均衡;当线谱不存在时,5个最高谱峰有可能宽窄不一,因此其中会出现较小数值,且5个峰值处的峰侧比数值会出现明显差异.基本特性3(B3),4(B4),5(B5)分别定义为5个峰侧比的均值、最小值、方差.
1.2.3 标志性特征
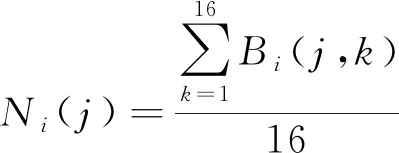
在水声目标检测任务中,我们定义单一样本为持续时间为1s的数据,共计16个通道.针对水声目标信号中线谱频率较低的情况,设定短时频谱计算使用的帧长为100ms,帧移为50ms,则1s样本中包含19帧.对任1样本的任1基本特性Bi,可获得1个19×16的矩阵Ci:
(4)
对第i个基本特征Bi构成的矩阵Ci,定义3个统计特征用于检测水声目标线谱是否处于发射期间,即矩阵Ci的全局均值,通道间标准差以及帧间标准差.
全局均值定义为
(5)
通道间标准差定义为
(6)
帧间标准差定义为
(7)
从5个基本特性Bi中共提取出15个特征用于机器学习算法,这些特征对于水声目标信号是否存在具有明显的区分能力.图6为其中特征1与特征11构成的散点图.图中,黑色星号为线谱发射期间的特征值,灰色圆圈代表线谱发射间隙的特征值,可见在这两种情况下,所选取的两个特征的分布具有明显的不交叉区域.配合其他特征以及适宜的机器学习算法,能够对线谱声源是否在发射期间进行准确地自动检测.
2 标志性特征用于水声目标检测的实验与结果分析
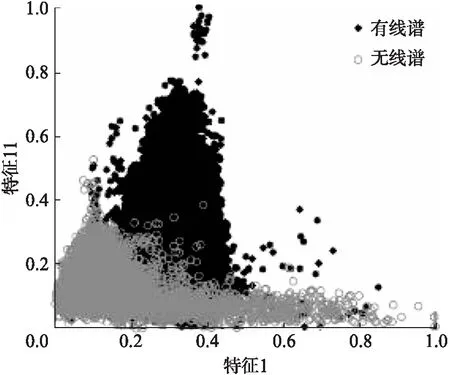
图6 特征1与特征11构成的散点图Fig.6 Scatter diagram composed of feature 1 and 11
利用前节所提取的15个水声目标的标志性特征,本节使用机器学习的方式对水声目标线谱是否存在进行了自动识别实验,实验结果表明: 在仅有15个特征的情况下,利用传统机器学习方法即可有效地对水声目标线谱进行检出,避免了深度学习方法的极高运算量,能够达到快速检测的效果.
2.1 实验设定
本文工作的实验部分选用4种不同的机器学习算法,分别为: 多层感知机(Multilayer Perception, MLP),支持向量机(Support Vector Machine, SVM),随机森林(Random Forest, RF)以及逻辑回归(Logistics Regression, LR).实验中将水声目标数据集的20%作为开发集进行模型参数的调节,通过多次的参数调节,确定模型参数如下: 多层感知机的输入神经元15个,隐藏层为1层,隐藏神经元25个,激活函数为S型传输函数,输出神经元1个;支持向量机使用线性核函数;随机森林使用100棵决策树,每棵树随机使用4个特征.为了验证所提取的标志性特征的效果,所有实验均使用10折交叉验证,实验使用的同一情况下的声源样本数据来源于不同日期,其面对的背景干扰情况不同.同时,对这些来源于不同日期的声源样本数据的训练测试可以解决数据的场景依赖性问题,能很好地证明所提出特征的鲁棒性.
实验内容分为两部分: 静止目标检测与移动目标检测.在静止目标检测中,发声声源与16元接收器均悬挂于试验基地水下,声源深度具有3种不同深度,所有深度下的数据统一使用,且数据均为夜晚采集,周边过往船只较少,环境噪声影响较弱.在移动目标检测中,16元接收器悬挂于试验基地水下,发声声源以固定长度缆绳悬挂于航行中的船只下方,数据采集于白天,受周边过往船只等影响较多,如图4(c)所示情况.
2.2 实验结果与分析
2.2.1 静止目标检测
静止目标情况下,共使用水声目标数据36848s,每1s的数据作为1个样本,利用上述4种算法进行10折交叉验证,实验结果如表1所示.
由实验结果可见,在仅提取15个特征且使用传统机器学习方法的情况下,各种方法对静止目标均能实现高于98%的识别准确率,且均表现出非常接近于1的AUC(Area Under Curve)面积,证明了本文提取的特征对于水声目标是否存在具有高度的标志性.
2.2.2 移动目标检测
移动目标情况下,共使用水声目标数据12560s,每1s数据作为1个样本,利用上述4种算法进行10折交叉验证,实验结果如表2所示.
由实验结果可见,移动目标检测的准确率能够达到90%左右,AUC在部分算法中能够达到0.95以上.
将移动目标检测和静止目标检测的结果进行对比,移动目标检测的准确率略低于静止目标检测,其AUC也低于静止目标检测,主要是由于移动目标信号在采集过程中受多种因素的干扰,比如附近过往船只辐射噪声的干扰、水体自身震荡的影响等,最关键的是由于目标在移动过程中与接收器的距离发生变化,产生传播时间的差异,其信号在被接收器接收到之前会进行叠加,导致接收到的信号与声源发射的原始信号有所不同.而静止目标信号采集于晚上,周边过往船只较少,环境噪声影响较弱.这两个实验说明我们提取的水声目标的标志性特征具有良好的抗干扰能力与泛化能力,能够在不依赖于深度学习方法的情况下,以很低的计算复杂度实现对水声目标的实时检测.
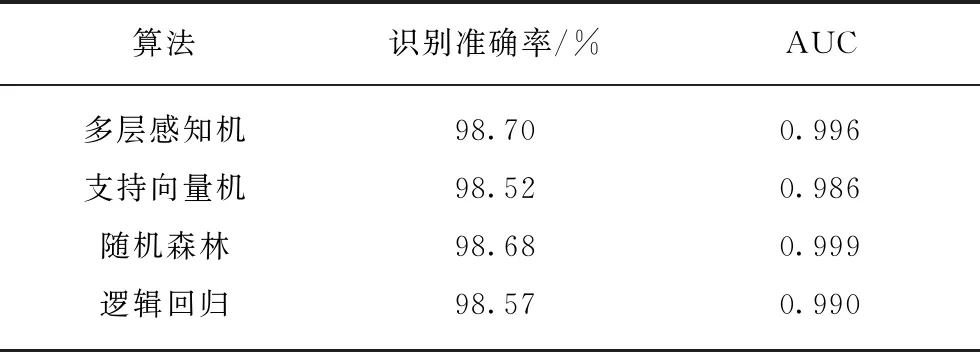
表1 静止目标检测的实验结果Tab.1 Results on fixed target detection
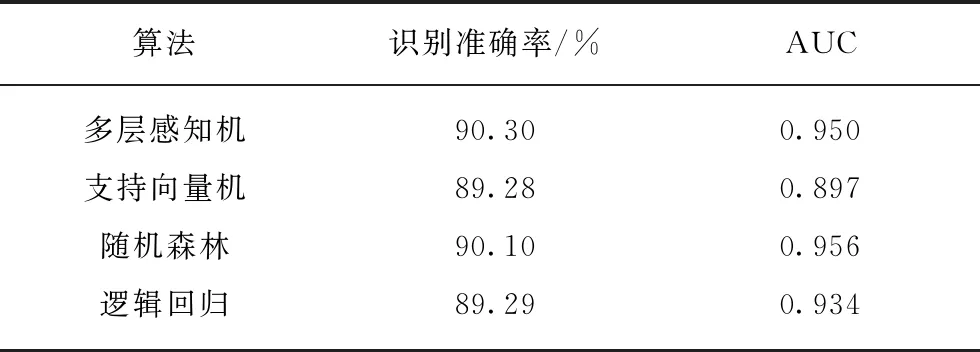
表2 移动目标检测的实验结果Tab.2 Results on moving target detection
3 结 语
本文利用某研究所提供的湖泊环境下的水声目标信号实测数据,对水声目标信号的特性进行分析,确定了5个能够明确表征其频谱特性的基本特性,并从中提取了15个统计值作为特征,用于基于机器学习的水声目标的自动检测.实验结果表明: 在仅有15个特征的情况下,利用传统机器学习方法即可有效地对水声目标线谱进行检出,避免了深度学习方法的极高运算量,能够达到快速检测的效果,且提取的水声目标的标志性特征具有良好的抗干扰能力与泛化能力,以很低的计算复杂度实现对水声目标的实时检测.
在实现了对水声目标信号的实时检测的基础上,下一步的研究目标将是进一步挖掘水声目标信号所携带的细节信息,用于对目标信号的位置和在水下的深度进行准确定位,实现全方位的水声目标检测与位置识别.
