一种带过载保护的盒式六分量天平的研制
2020-06-22马成聪王卫英
马成聪,王卫英
(南京航空航天大学 机电学院,江苏 南京 210016)
0 引言
旋翼试验台中的六分量天平是测量旋翼轴上力和力矩的重要测量仪器,根据装夹方式不同,六分量天平分为旋转式天平和固定式天平两类。旋转式天平通过法兰直接嵌入旋翼轴中随轴转动,而固定式天平放置于机架上,不随旋翼轴转动,测量时通常通过轴承来进行载荷传递。旋转式天平结构强度、刚度以及装配精度要求高,信号采集时需要解决旋转件与非旋转件通信的问题,同时旋转式天平本身的测量坐标系会随着旋翼轴旋转而一直改变,需要另设角度传感器测量旋转角度来计算坐标系的变换矩阵,测量过程十分复杂。而固定式天平结构简单,维间耦合小,测量精度高,能够直接测量旋翼所受载荷的六个分量,并且更容易拆卸、更换以及维修,所以在旋翼试验台中运用更为广泛[1]。常见的电阻应变片式六分量天平根据结构方式可分为杆式应变天平与盒式应变天平两类,相比于杆式应变天平,盒式应变天平刚度大、机械解耦更加彻底。
这里设计的六分量天平采用盒式结构,由浮动框、弹性连杆、拉压力传感器和固定框装配而成。测量时旋翼轴与天平浮动框分别和轴承内外圈固定连接,测量模型上的载荷直接传递到浮动框上,通过8根弹性连杆上的拉压力传感器进行测量。弹性连杆两端有双向弹性铰链,弹性铰链提供的横向或径向自由度主要为了减小这两个方向上力的作用,所以弹性连杆主要传递拉力或压力,保证了与弹性连杆相连的传感器只测量弹性连杆的轴向载荷,提高了天平的机械解耦性能[2]。在设计过程中,通过有限元软件ABAQUS分析弹性连杆结构对天平机械解耦性能的影响,选择单层十字梁圆杆为最终方案。
1 盒式六分量天平结构及测量原理
直升机旋翼上的矢量推力和力矩传递到浮动框时被天平分解为相互正交的3个方向的力和3个方向的力矩,分别定义为Fx、Fy、Fz、Mx、My、Mz,力与力矩的方向符合右手法则。盒式六分量天平的量程分别为:Fx=±200 N,Fy=±200 N,Fz=±400 N,Mx=±50 N·m,My=±50 N·m,Mz=±50 N·m。根据实验台的有效量程和安装空间需求设计天平尺寸,天平外形尺寸为:长260 mm,宽260 mm,高117 mm。浮动框与固定框之间用8根固连S型拉压力传感器的弹性连杆连接,其中z方向4根,x方向2根,y方向2根。盒式六分量天平整体结构如图1所示。
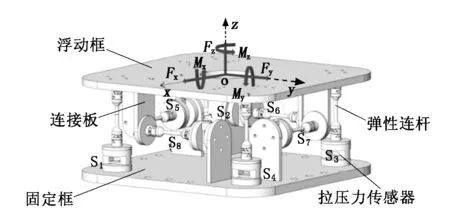
图1 盒式六分量天平整体结构
可以看出浮动框所受六分量中的3个力分量,就是对应方向传感器测量值的叠加。Mx分量分配到8个拉压力传感器上,主要体现在沿z方向布置的4个拉压力传感器上的受力。当Mx分量为正时,传感器S1、S2压缩,传感器S3、S4拉伸;当Mx分量为负时,传感器S1、S2拉伸,传感器S3、S4压缩。My分量的测量原理与Mx分量的测量原理相同。Mz分量作用到8个拉压力传感器上,主要体现在沿x和y方向布置的4个拉压力传感器上的受力。当Mz分量为正时,传感器S5、S7拉伸,传感器S6、S8压缩;当Mz分量为负时,传感器S6、S8拉伸,传感器S5、S7压缩。力矩的测量还与传感器的布局(力偶之间力臂的大小)有关[3]。
为了比较不同弹性连杆结构对天平的影响,采用相同的天平模型下更换不同的弹性连杆进行分析,这就要求不同连杆结构的主要尺寸相同(上下连接处圆柱直径为12 mm,总高为74 mm),最小横截面积相同(均为3.6 mm2),弹性铰链处孔径或片状体高度相同(均为4 mm),同时要求开孔和开槽的位置相同。此处进行比较的三种连杆结构如图2所示。图2(a)是双孔十字梁方杆结构,中间正方形杆边长为12 mm,杆上开有关于轴线对称的圆形通孔,孔径为Φ4 mm,孔间距为0.3 mm,孔处槽间隙为0.5 mm。图2(b)是双层十字梁方杆结构,中间正方形杆边长为12 mm,片状体处为关于轴线对称的两层薄片,薄片厚度均为0.15 mm并且间距为1 mm。图2(c)是带过载保护结构的单层十字梁圆杆结构,中间圆柱体直径分别为Φ12 mm和Φ4 mm,片状体处为单层薄片,薄片厚度为0.3 mm。

图2 不同结构的弹性连杆
2 天平的有限元计算
在应变天平的设计中可以应用有限元方法对天平结构进行研究,方便对天平整体应力分布、变形与各测量元件有效应变进行计算,进而分析天平各分量间的干扰以及评估天平的性能。将天平模型作为一个部件导入有限元分析软件ABAQUS中,材料为00Ni18Co8Mo5TiAl,弹性模量E=187 250 MPa,泊松比μ=0.3,屈服极限σs=1 754 MPa。在天平测量中心点(0,0,59.5)创建一个参考点RP1,并将浮动框中心孔面与参考点RP1耦合,使得孔面受到的载荷耦合到天平测量中心,消除浮动框和测量中心距离差引起的测量偏差,参考点位置如图3所示。网格划分时,在Mesh模块中采用全局网格控制,设置为边长5 mm的四面体线性单元C3D4,经过切割将连杆的弹性弯曲部分和传感器S型弹性体部分进行局部网格控制,设置为边长1 mm的四面体线性单元C3D4,此处S型弹性体处均需要设置成边长1 mm的四面体单元,以便后处理时可以采集相同节点处的应变。
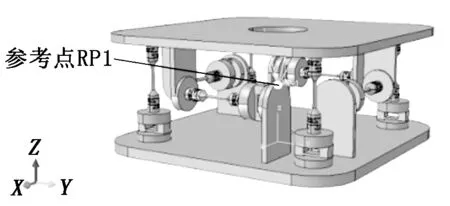
图3 RP1参考点的空间位置
不考虑重力以及预紧力的情况下,天平的所有应变均由施加的测量载荷产生。将各传感器应变片粘贴区域中心节点处应变值经过全桥电路计算后的输出应变视为传感器的有效应变,记作εSi(i=1~8)。通过计算公式(1)得到不同载荷下的应变情况:
(1)
其中:εF为在载荷F(F是广义力,指的是Fx、Fy、Fz、Mx、My、Mz)作用下天平对应分量的输出应变。
3 解耦效果分析
盒式六分量天平主要通过弹性连杆实现机械解耦,为了分析连杆结构对天平解耦效果的影响,采用单元加载法,依次在参考点RP1上施加集中力和力矩,每组分析中仅施加一种分量,其余分量为0,其中Fx、Fy、Fz、Mx、My和Mz分别为200 N、200 N、400 N、50 N·m、50 N·m和50 N·m。通过公式(1)计算得到不同载荷下的天平应变情况,并计算各分量的一次总干扰量A,见表1。一次总干扰量A表示在其余分量依次满量程加载时对某一分量的干扰应变之和与该分量在满量程加载下输出应变的比值[4](为了计算各分量对其余分量产生的最大干扰量,此处将表1中干扰应变取绝对值来计算A)。
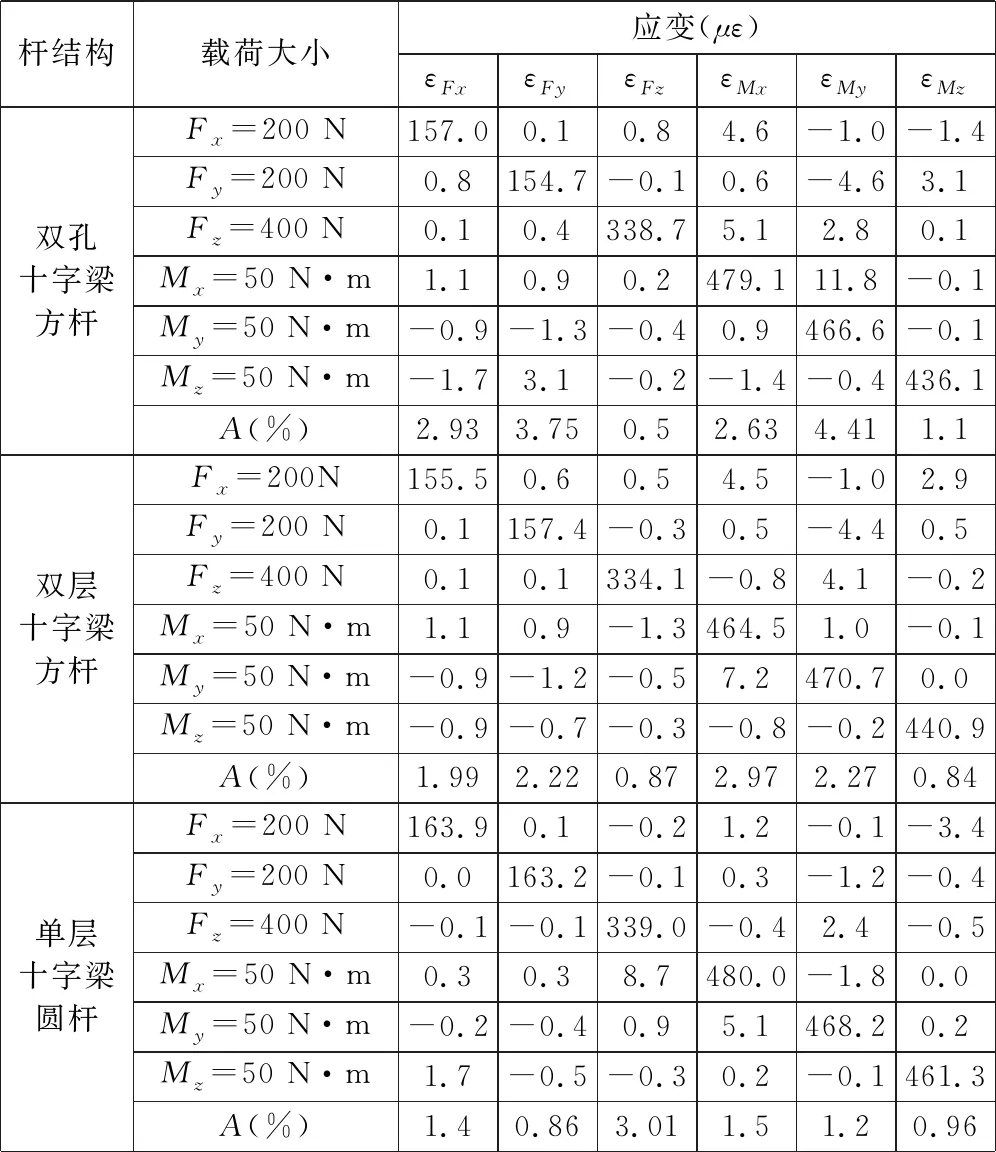
表1 不同载荷下天平应变情况
由表1可以看出,在有限元模拟的理想状态下,采用双孔十字梁方杆的盒式六分量天平各分量的一次总干扰量在4.41%以内,采用双层十字梁方杆的盒式六分量天平各分量的一次总干扰量在2.97%以内,采用单层十字梁圆杆的盒式六分量天平各分量的一次总干扰量在3.01%以内,干扰较小。考虑实际加工难度,单层十字梁圆杆结构更为理想。
针对十字梁结构过载时会出现断裂或压弯的问题,此处设计了双Z形过载保护结构(如图4所示),使得弹性连杆无论在受压或者受拉状态下均能够得到限位保护,以增加零件使用寿命。当六分量均满量程加载时,比较各弹性铰链过载保护结构处的位移,发现与S1号传感器相连的弹性连杆上过载保护结构处变形最大,通过读取双Z形处起过载保护作用的接触点(图4(b)中P1、P2、P3、P4、P5、P6点)与相邻边界最近点的相对位移值,发现均不超过0.02 mm。考虑实际加工难度以及装配精度,设计过载保护结构双Z字形处间隙为0.05 mm。
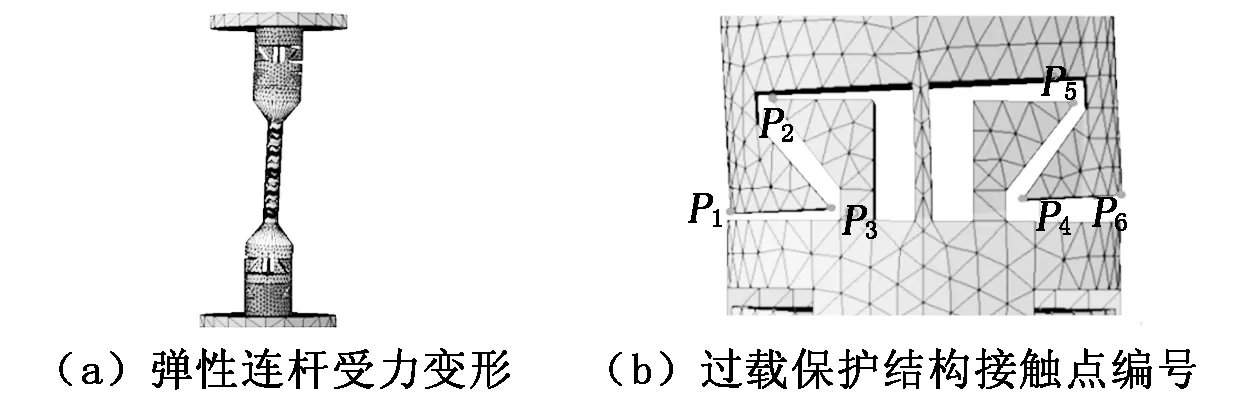
图4 弹性连杆过载保护结构
4 天平六分量的标定
盒式六分量天平装配完成后,进入标定阶段,如图5所示。天平静态标定是指利用天平标定装置,通过静态加载的方法,模拟天平在实际测力试验中的受力状态,拟合出天平输出与校准载荷之间的数值关系。实际标定时采用单元加载法,盒式六分量天平通过STM32最小核心板与信号放大模块配合进行8个传感器输出信号的采集与处理。标定实验中,各分量在正、负满量程下分为11个等间距加载点(包含0加载点)进行等阶梯加载,将8支传感器测量信号计算成力值再通过公式(2)得到天平六分量测量值:
(2)
式(2)中,力臂l均为0.09 m。各分量标定数据如图6所示,3个力分量的单位为N,3个力矩分量的单位为N·m。
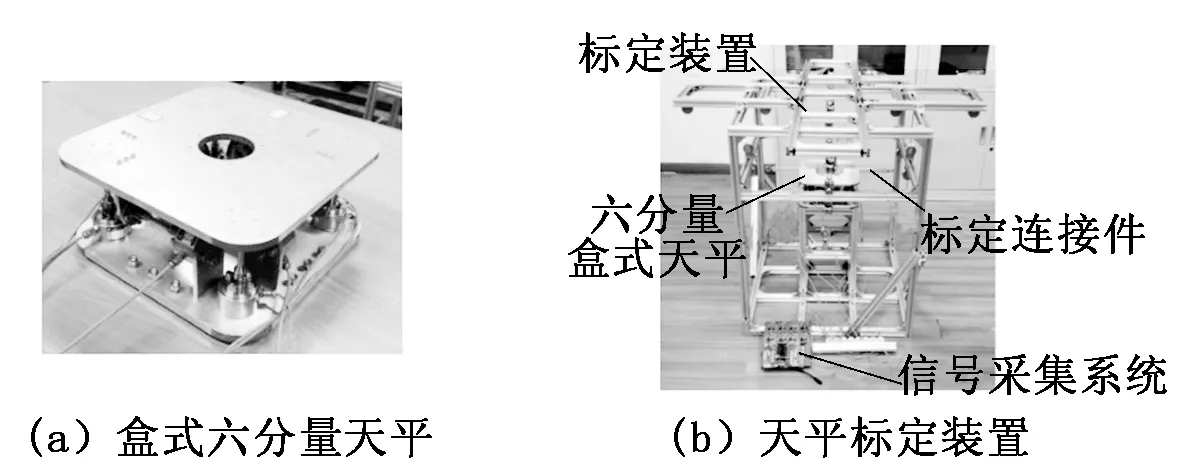
图5 盒式六分量天平及标定装置
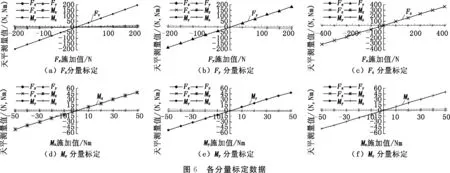
从图6可以看出,各分量之间机械解耦较为彻底。由于实际标定时加载点与天平测量中心不重合,因此在标定Fx和Fy分量时将会产生附加力矩ΔM,引起My和Mx分量的变化,通过公式ΔM=Fx(Fy)×h(h为加载点到天平测量中心在z方向的距离)可以计算出附加力矩值并加以消除,最后得到天平的解耦性能,如表2所示。
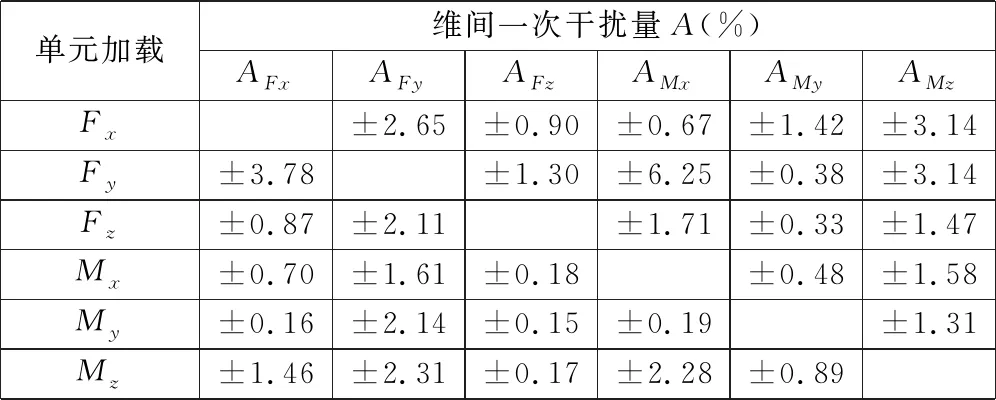
表2 天平的解耦性能
由表2可知,天平各分量维间干扰较小,各分量的一次总干扰量均在3.78%以内,机械解耦比较彻底。由于维间耦合以及应变片粘贴误差引起的测量误差无法完全消除,需要在标定结果上进行修正。
5 结论
本文设计了一种盒式六分量天平,根据有限元分析以及天平标定实验结果可知,采用单层十字梁圆杆的盒式六分量天平解耦效果比较好。天平各弹性连杆自带过载保护结构,保证了弹性连杆无论在受压或者受拉状态下均能得到限位保护,可避免测量时的过载折断失效。该天平已用于小型旋翼试验台上的旋翼轴载荷六分量测试,取得了比较理想的测量效果。
