自适应通风柜罩面风速控制系统的设计与实现
2020-06-10周圣杰陈年生范光宇曾祥绪杨定裕
周圣杰, 陈年生, 范光宇, 曾祥绪, 杨定裕
(上海电机学院 电子信息学院, 上海 201306)
通风柜普遍应用于科研机构和高校的各类实验室。化学实验进行过程中,一般会产生难闻、有毒或有腐蚀性的有害气体,若不及时将有害气体从室内抽离,不仅对设备造成一定的损坏,还污染实验室内部空气,甚至影响实验人员的健康与安全。为避免实验过程中产生的有害气体在室内扩散,保障实验人员的人身安全,实验需在通风柜中进行[1]。在实验通风柜的设计中,最重要的是对通风柜罩面风速的控制。
空气是一种流体,有黏滞性和流动性,在实验通风柜内抽气时会产生气流旋涡、紊流等,因此,对于精准控制极为困难[2]。若不能准确控制通风柜罩面风速,会对实验人员安全与实验的真实性造成影响。国内通风柜制造商以生产定风量通风柜为主,具备生产变风量通风柜和无管净气型通风柜能力的制造商较少。定风量通风柜固定了通风柜的排风量,通风柜罩面风速在安装时设定为固定值,在人员使用时不能有效保证罩面风速满足实验的要求。为了确保人身安全与实验的真实性,需要将定风量通风柜改进为变风量通风柜,通过控制通风柜的排风量调控通风柜罩面风速。
近年来,许多专家学者也提出了对于通风柜罩面风速的控制方法。文献[1]通过测量视窗的开口高度调整排风机的转速,改变单位时间内的排风量,达到控制罩面风速的效果;文献[2-3]通过CPU主控模块与变频调速器对通风柜罩面风速进行控制,可以提升人员工作效率;文献[4]将风速传感器采集到的8次测量取平均值作为当前的罩面风速,对装有电动风阀的通风柜进行测试,提出使用罩面风速闭环控制来保证罩面风速满足要求;文献[5]通过在ARM内使用比例积分微分(Proportion Integration Differentiation, PID)控制得到输出电压,进而控制阀门的开度,实现罩面风速的控制;文献[6]使用新风风速传感器对风速进行测量,并使用通风柜柜门开闭状态传感器对视窗开启面积进行测量,计算排风量差值,利用变频控制柜控制排风风机转速,从而使罩面风速保持在允许范围内;文献[7]通过感知管道内的静压值变化,经过处理后使用变频器改变风机的转速,实现罩面风速的控制;文献[8]在风速测量阶段使用中值平均滤波提升罩面风速测量精度,在控制环节通过增量式PID闭环控制运算控制风阀,从而控制通风柜的罩面风速;文献[9]在多个通风柜系统中通过变频器控制风机频率控制排风量,在单个通风柜中通过控制阀门的开度控制排风量,通过两种控制排风量到达控制罩面风速的效果。这些方法在测量罩面风速阶段和控制罩面风速阶段都存在着较大的误差。
本文使用罩面风速传感器对通风柜罩面风速进行测量,再利用卡尔曼滤波算法对测量到的罩面风速数据进行筛选,通过自适应控制方法控制风阀的开合角度,从而实现对通风柜罩面风速的控制。使用这种设计可以精准、快速地控制通风柜罩面风速,使罩面风速的控制误差不超过11%。并且可以使每个智能实验通风柜单独控制,互不干扰,方便了变风量系统的管理与扩展。
1 问题分析
实验室产生的有毒有害气体必须及时排出,通风柜要保证有害气体不能溢出,也不能在柜内产生紊流,故罩面风速是衡量通风柜性能的主要技术参数。国家对通风柜罩面风速规定标准为:0.4~0.6 m/s。通风柜中排风量计算公式为[5]
L=3 600×Svβ
(1)
式中:L为通风柜中排风量,m3/h;S为视窗开启面积,m2;v为罩面风速,m/s;β为安全系数(1.05~1.1)。
从式(1)可以看出,如果一个通风柜没有调节系统,且在视窗全开时满足0.4~0.6 m/s的罩面风速,那么当它的视窗开启一半或全关闭时,罩面风速将会超出允许范围[10],极大地影响排风及实验效果,严重时甚至会威胁实验人员的人身安全。
由式(1)可以得到罩面风速为
(2)
S=wh
(3)
式中:w为视窗的开口宽度,m;h为视窗的开口高度,m。
由式(2)、式(3)可知,想要对通风柜罩面风速进行控制,可以从排风量L与视窗的开口高度h两个方面进行控制。因为视窗的开口高度h在人员使用时不能随意控制,所以需通过控制通风柜顶部的风阀,调节通风柜排风量L来控制罩面风速。
现有的通风柜对排风量的控制一般为定风量或者是使用变频器来控制排风机转速,从而控制排风量,不仅价格昂贵,并且在柜内罩面风速的控制上不能做到快速、准确,会影响实验的准确性甚至威胁实验人员的人身安全,需要提升对通风柜排风量的控制精度。本文使用自适应通风柜罩面风速控制系统对柜内风阀进行控制,用来提升对排风量的控制精度。
2 系统的设计与实现
2.1 系统的设计
2.1.1 自适应控制模型的设计 若使用常规控制方式,当误差产生后,会在允许范围处持续振荡,经过一段时间才能平稳控制在允许范围内,延长了控制的时间,缩短了风阀电动机的使用寿命。为了提升风阀的控制精度,缩短控制时间并延长使用寿命,在控制环节使用自适应PID控制模型,PID控制分为比例、积分、微分3个部分,通过实时更新差值比例,计算所需要的调整值。具体计算公式[11-13]为
Kd(e(t)-e(t-1))
(4)
将差值比例代入PID控制器中,经过比例处理、积分处理和微分处理后,得到3个处理值,再乘以相应的比例、积分、微分系数,相加得到对应的调整值,再由PID控制器发送给处理端对风阀进行相应的开启、闭合操作,使差值比例不断减小,然后不断更新差值比例的值,使得差值比例逐渐减小并稳定在允许范围内。相较于常规的控制方法,自适应PID控制方法可以很好地减小风阀的开合误差,缩短控制的时间,减少控制风阀的次数。
PID控制算法的流程如图1所示。
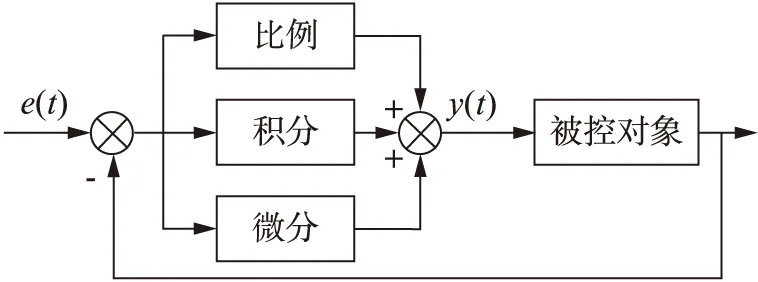
图1 PID控制算法流程图
通过式(4)可以计算通风柜风阀调整值
Kd(φ(t)-φ(t-1))
(5)
式中:Q为通风柜内风阀实时的调整量;φ(t)为当前通风柜排风量的差值比例,
(6)
式中:Ln为当前柜内排风量;Ld为目标排风量。
结合计算排风量的式(1)可得
(7)
式中:vg为测得通风柜罩面风速;vd为目标罩面风速;S*为改变后的视窗面积。
可见差值比例φ(t)与当前测得的罩面风速vg有关。需要提高对罩面风速vg的测量精度,使其接近当前通风柜罩面风速的真实值,进而提升差值比例φ(t)的精度,提升风阀的控制精度。
现有的通风柜罩面风速的测量大都是直接使用罩面风速传感器,或是使用简单的中值滤波等方法。但是空气为流体,当实验人员在柜前工作时,可能会在人体周围产生紊流、旋涡等情况,使用现有方法测量罩面风速存在较大误差,所以,在风速测量环节加入卡尔曼滤波环节,提升罩面风速的测量精度。
2.1.2 卡尔曼滤波环节的设计 为了提升罩面风速的测量精度,需要对采集的罩面风速信号进行滤波处理,但在实际使用通风柜时,采样得到的罩面风速是离散的时间数据,为确保测得的罩面风速能确切表示实时的通风柜罩面风速,需要一个离散动态时间系统来模拟[14],本文使用卡尔曼滤波对罩面风速信号进行处理。卡尔曼滤波原理可以表示为
x(n+1)=Ax(n)+D1(n)
(8)
y(n)=Cx(n)+D2(n)
(9)
式中:x(n)为系统在离散时刻的状态向量;A为状态转换矩阵,设置其初始值为E,因为算法本身具有根据下一时刻的测量值来与上一时刻的预估值进行动态的加权修正的特性,所以这样设置并不会影响系统本身的状态转移特性,而且可以去除测量时的噪声;C为测量系统参数矩阵;y(n)为n时刻的预测值;D1(n)为系统噪声矩阵;D2(n)为测量噪声矩阵[15-16]。
卡尔曼滤波原理可以根据系统的上一状态的罩面风速预测系统当前状态的罩面风速。假设当前系统状态为n,根据式(8)、(9)并结合通风柜罩面风速测量的具体情况,卡尔曼滤波的具体过程如下:
首先通过n-1时刻罩面风速的最优值计算当前状态的罩面风速预测值,计算公式为
v(n,n-1)=Av(n-1,n-1)
(10)
式中:v(n,n-1)是预测的当前状态罩面风速值,v(n-1,n-1)是n-1时刻的最优罩面风速值。
再通过n-1时刻的罩面风速协方差计算当前时刻的罩面风速协方差预测值,有
P(n,n-1)=AP(n-1,n-1)AT+B1(n)
(11)
式中:P(n,n-1)为v(n,n-1)对应的协方差;P(n-1,n-1)为v(n-1,n-1)对应的协方差;B1(n)为系统噪声对应的协方差。
通过当前时刻的协方差计算当前时刻的卡尔曼增益为
(12)
式中:B2(n)为测量噪声对应的协方差。
得到卡尔曼增益后,计算当前时刻通风柜罩面风速的最优值,即经过滤波后输出的当前通风柜罩面风速值,有
v(n,n)=v(n,n-1)+G(n)(F(n)-
Cv(n,n-1))
(13)
式中:v(n,n)为当前通风柜罩面风速的最优值,记为vg;F(n)为通过AD转换得到的罩面风速测量值。
得到当前时刻罩面风速的最优值后,为了让滤波一直进行,要继续更新当前状态下v(n,n)的协方差,有
P(n,n)=(1-G(n)C)P(n,n-1)
(14)
当系统进入n+1状态时,就将当前时刻的罩面风速最优值与其协方差代入计算。这样滤波算法就可以一直运行下去,不断处理测量到的罩面风速值。
通过卡尔曼滤波可以很好地避免空气流体特性所引起的测量问题,并减少系统噪声和测量噪声的影响,能有效提升罩面风速的测量精度,使测量到的罩面风速值更加接近于真实的罩面风速值,为自适应控制提供有效保证。
2.2 罩面风速控制的实现
2.2.1 罩面风速的获取 在罩面风速测量阶段使用CHWVN罩面风速传感器,并通过搭建风速测量平台,确定卡尔曼滤波中各参数矩阵的初始值。用C语言编写AD转换代码,用于将测量到的风速模拟值转化为利于计算处理的数字值。将罩面风速数字值输入卡尔曼滤波算法中,滤去在测量过程中存在的干扰与噪声,提升通风柜罩面风速的测量精度,使获取到的罩面风速更接近真实的罩面风速值。获取罩面风速的流程如下:
步骤1通过罩面风速传感器对通风柜罩面风速进行测量;
步骤2将罩面风速传感器测量到的模拟信号经AD转换为数字信号;
步骤3使用卡尔曼滤波对转化后的数字信号进行优化;
步骤4将滤波值处理转化为此时柜内的罩风速值vg;
步骤5不断循环测量通风柜罩面风速。当通风柜关闭使用后,经20 s延时退出。
通风柜罩面风速获取流程如图2所示。

图2 通风柜罩面风速的获取流程
通过该步骤获取的实时罩面风速值更加接近真实值,可以有效减少噪声和干扰,提高罩面风速的测量精度。
2.2.2 罩面风速的控制 通过对历史测量的风速数据的分析,设定目标罩面风速和约束系数a、b的值,选取在通风柜罩面风速控制时的最优Kp、Ki、Kd的参数值,再将计算得到的差值比例φ(t)代入式(5)计算风阀当前时刻所需的调整值Q,执行自适应控制,调节风阀。风阀的控制流程如下:
步骤1通过拉线位移传感器测量视窗的开启高度h,计算视窗的开启面积S;
步骤2通过风速获取流程获取当前的罩面风速值vg;
步骤3通过设定的目标罩面风速值vd,计算当前的差值比例φ(t);
步骤4通过自适应控制环节计算通风柜风阀所需调整值Q,驱动风阀电动机进行调整;
步骤5通过循环不断更新通风柜风阀所需调整值Q,使罩面风速逐渐达到允许范围内。当通风柜关闭使用后,经20 s延时退出。
通风柜罩面风速控制流程如图3所示。
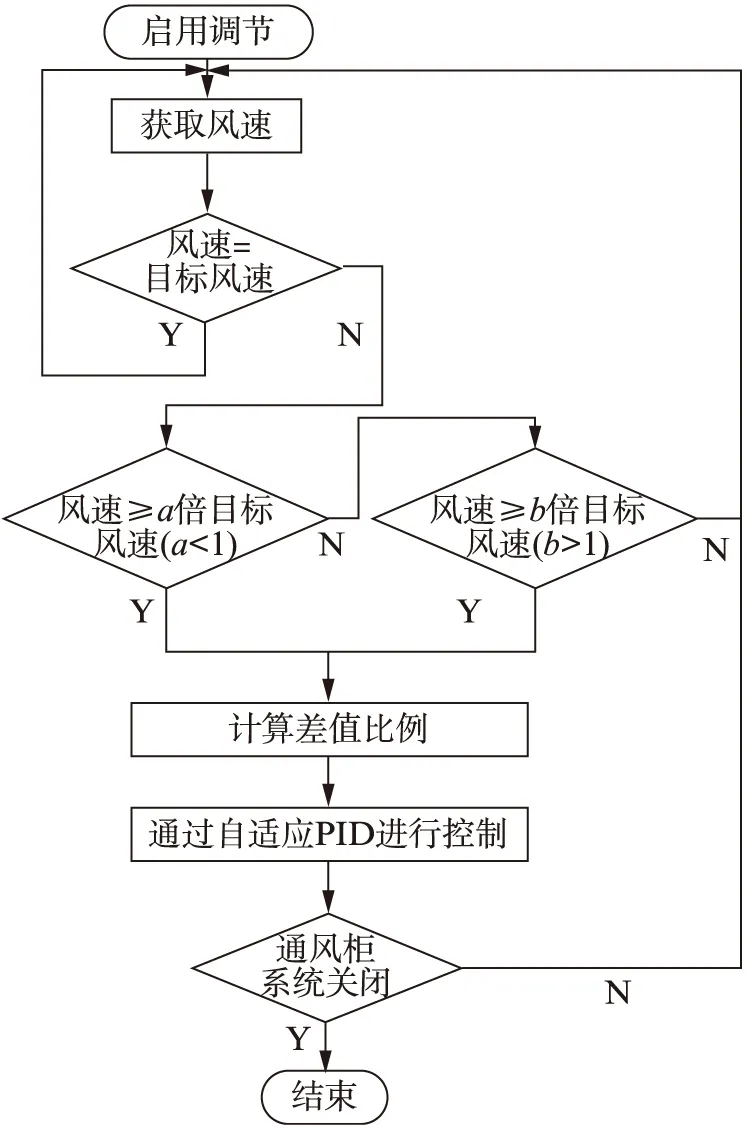
图3 通风柜罩面风速的控制流程
3 基于卡尔曼滤波的自适应控制系统分析
在Matlab软件中以实验通风柜的实测数据为样本进行编程仿真,设定卡尔曼滤波参数:A=[0.879 4,-0.082 7,0.082 7,0.996 4];B1(n)=3.460 4×10-4;B2(n)=0.001 8;C=[0.117 0,0.005 1]。设定自适应控制参数Kp=1.6;Ki=0.9;Kd=0.4;设定控制过程中约束系数a=0.95,b=1.05。
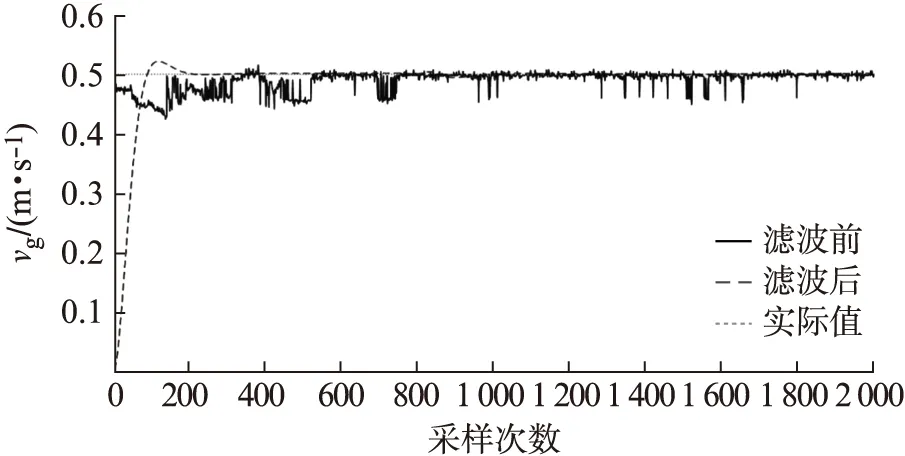
图4 卡尔曼滤波效果比较
图4为卡尔曼滤波效果比较图。图中实线为使用卡尔曼滤波前测量到的罩面风速,长虚线为经卡尔曼滤波后测量到的罩面风速,短虚线为理想罩面风速值。从图4可以看出,随着采样次数的增加,实线仍然存在较大波动,长虚线快速收敛,采样超过231次后,长虚线基本与短虚线的实际值保持一致。说明通过卡尔曼滤波可以减少气体扰流和黏滞问题引起的测量抖动,并除去大部分的系统噪声和测量噪声,降低测量误差。
图5所示为经卡尔曼滤波后自适应控制输出的调整值与未使用卡尔曼滤波自适应控制输出的调整值的对比图。图中实线为不使用滤波时输出的调整值,虚线为使用滤波处理后输出的调整值。从图5可以看出,实线存在较大波动,虚线快速趋于稳定,当采样达到237次后,虚线趋于0,即不需要对风阀进行调整。说明在测量阶段引入卡尔曼滤波,可以有效减少因扰流等引起的波动,减少控制风阀的频率,有效延长风阀的使用寿命。

图5 两种情况下自适应调控值对比
图6所示为使用自适应控制与常规的控制方法在同一差值比例下,对风阀进行控制所需的时间进行对比。图中实线为常规控制下风阀的调整量,虚线为使用自适应控制时的风阀调整量。从图6可以看出,实线振幅较大且在0值附近不断振荡,虚线振幅小且振荡次数少,当达到7.75个时间单位时,虚线已经趋于稳定,即完成对风阀的控制。说明通过自适应控制风阀,能更快更稳定地控制风阀达到目标位置,从而能更快速准确地控制通风柜罩面风速,保障实验人员的安全。
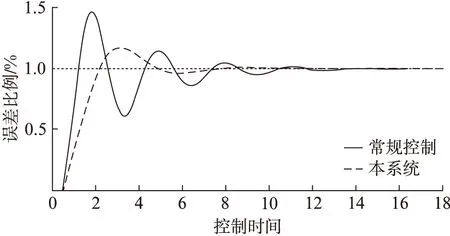
图6 所需控制时间对比
图7、图8为初始罩面风速为0~0.9 m/s,视窗开度由1/4变为1/2和视窗开度由1/4变为全开时,使用本文控制系统与常规控制系统的罩面风速控制误差百分比的对比。图中实线为常规控制下的误差百分比,虚线为本系统下的误差百分比,反映了罩面风速从不同初始值调整至目标值后存在的总体误差大小。从图7、图8可以看出实线较为陡峭,误差较大,在初始风速接近目标罩面风速时误差很大;虚线较为平滑,在各初始罩面风速情况下误差较小。说明本系统可以降低通风柜罩面风速的控制误差,使通风柜的罩面风速保持在允许范围内,保障实验的有效性和实验人员的安全性。
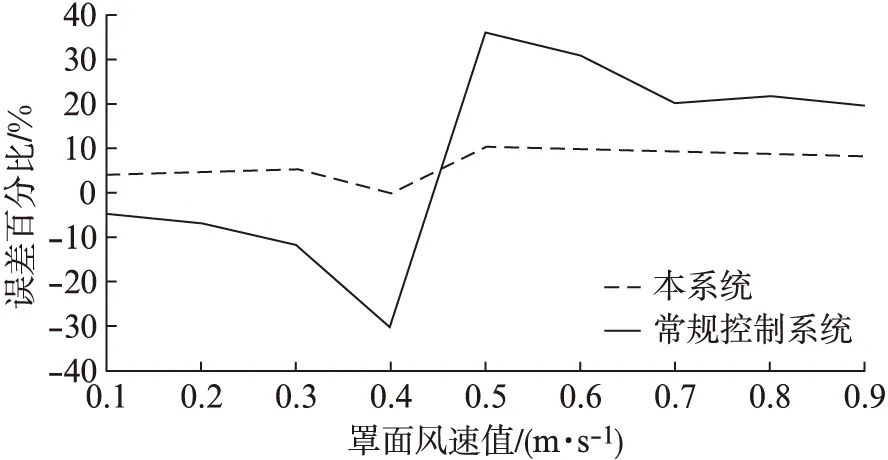
图7 视窗开度由1/4变为1/2时罩面风速控制误差对比

图8 视窗开度由1/4变为全开时罩面风速控制误差对比
4 结 语
本文针对通风柜中的空气流动性和黏滞性引起的扰流和对罩面风速测量的影响,使用卡尔曼滤波降低系统噪声和测量噪声,提升罩面风速的测量精度。使用自适应PID控制方法将测量到的罩面风速经计算获得调整值,再通过风阀电动机控制通风柜内的风阀和排风量,并通过闭环反馈与实时的调整值更新,从而实现精确快速的控制通风柜罩面风速。通过仿真和实验发现,与常规方法相比,使用基于卡尔曼滤波的自适应控制方法可以提升罩面风速的测量精度,并且明显减少对风阀的控制次数,从而有效延长通风柜的使用寿命,同时基于卡尔曼滤波的自适应控制方法比传统方法罩面风速的测量误差减小10.11%,所需控制时间减少51.63%,罩面风速控制误差减少了25.95%。使用基于卡尔曼滤波的自适应控制方法能有效提高罩面风速控制速度,减少风阀的控制次数,从而延长通风柜的使用寿命,减少对罩面风速的控制误差,提高通风柜的安全性。
