基于定子永磁拓扑的混合式步进电机二维等效模型构建方法
2020-05-29鲁炳林徐衍亮
刘 剑,鲁炳林,赵 博,徐衍亮
(1. 山东理工大学 电气与电子工程学院,山东 淄博 255049;2. 山东大学 电气工程学院,济南 250061)
0 引 言
混合式步进电机综合了磁阻式和永磁式步进电机的优点,转矩密度大、定位精度高、开环控制方式简单,已成为目前工业自动化领域应用最为广泛的步进电机类型[1]。由于混合式步进电机气隙往往较小,主磁路饱和严重,且在相同的励磁条件下,在不同转子位置时主磁路的饱和度也不尽相同,因此是高度变非线性度的磁系统[2]。此外,混合式步进电机的转子永磁体沿轴向充磁,使得永磁磁场呈三维分布,并且铁心叠片间绝缘层磁阻较大,导致永磁磁场沿轴向呈非线性非均匀分布,磁路非常复杂[3-5]。因此,混合式步进电机的精确计算,以及非线性参数的精确测定,都存在很多困难,往往要做很多简化和假定。近年来,混合式步进电机系统的运行频域、响应速度、运行平稳性等一系列性能指标的需求不断提高,对混合式步进电机的设计分析精度也提出了更高的要求。
目前,步进电机的分析方法主要包括解析法、场路耦合法和有限元法[6-10]。解析法难以考虑铁心饱和等影响,计算精度不高。齿层比磁导法是最常用的场路耦合分析方法[11-12],只对电机中磁场变化最为剧烈的气隙及齿层区域磁场进行二维有限元求解,其他部分则采用磁路的方法求解,计算精度相对较高。然而,该方法所建立的非线性磁网络模型难以考虑电机轴向磁路磁阻对气隙磁场分布的影响,因此更适合于磁阻式步进电机,而对混合式步进电机仍然存在较大的误差,工程应用时也需凭经验加以修正。由于混合式步进电机存在径向和轴向磁路,且在两个方向上均存在磁路局部饱和的现象,因此通常需要采用三维有限元法来计算,计算耗时较大,且受网格剖分密度所限,计算精度也不是很高,在产品开发中并不具有实用性。
针对齿层比磁导法存在的不足,文献[13]在考虑到永磁磁场沿轴向非均匀分布的基础上,采用电机轴向分段方法建立了更为精确的分布非线性磁网络模型,提高了计算精度,但模型的建立和求解均比较复杂。为简化三维有限元分析计算过程、节省计算时间,文献[14]提出了一种基于模型变换的混合式步进电机静态特性分析方法,通过将电机三维模型进行结构变换来获得二维等效模型,并将二维有限元计算结果进行后处理(即模型反变换),实现原电机的性能仿真,该分析方法相比于齿层比磁导法具有更高的计算精度,但只能用于分析电机的静态特性,并且未能考虑永磁磁场沿轴向非均匀分布的特性,计算结果仍存在一定误差。
本文提出一种基于定子永磁拓扑的混合式步进电机二维等效模型构建方法,基于该模型可采用二维有限元法对混合式步进电机进行静态及瞬态分析,有效缩短了仿真计算时间、降低了分析难度,并且能够考虑到磁场沿轴向非均匀分布的特性,具有较高的计算精度。
1 定子永磁二维等效模型建立方法
1.1 混合式步进电机结构及工作原理
最常用的2相8极50齿混合式步进电机结构如图1所示。定子有8个磁极,每个磁极上开有相同的定子小齿且分别绕有相同匝数的集中绕组,绕组A与-A、B与-B所在的磁极定转子相对位置互差1/2转子齿距。转子包含两段相同的转子铁心及中间夹放的环形永磁体,每段转子铁心上有50个转子小齿,并且两段转子铁心相互错开1/2转子齿距(即磁极1的定子小齿与转子铁心1处于“齿对齿”位置时,与转子铁心2处于“齿对槽”位置)。永磁体沿轴向充磁,两段转子铁心极性相反(以S、N极转子进行区分),定子各磁极呈现与转子相反的极性。永磁磁通穿过轴向和径向磁路闭合,故为轴-径向混合磁路系统。由于电机结构沿圆周方向呈周期对称,可沿图1(b)、图1(c)中的斜45°虚线将电机等分为两部分,即I=II,III=IV。
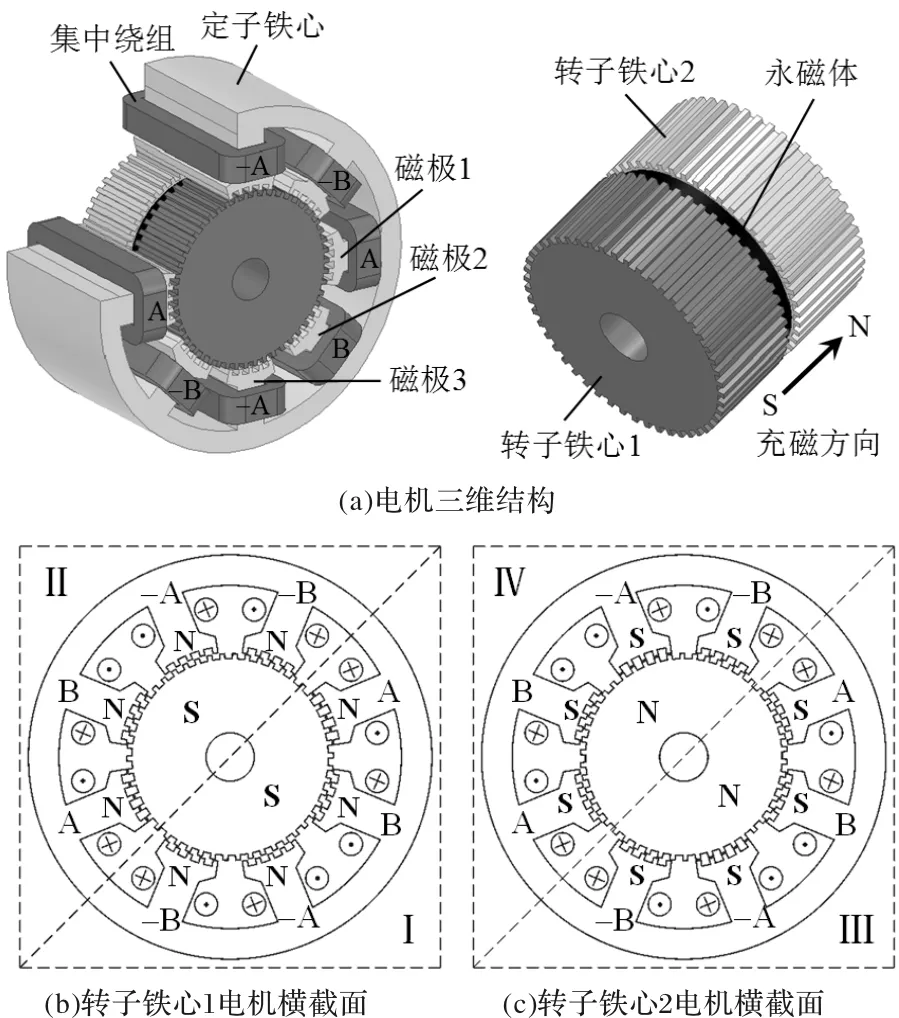
图1 2相8极50齿混合式步进电机结构图
开环控制运行及电流细分驱动条件下[15],混合式步进电机单相永磁磁链和电流的理论波形如图2所示,且有
(1)
i=Imcos(θ+δ)
(2)
式中,Im为电流幅值;θ为转子位置角,δ为转矩角,均为电角度。
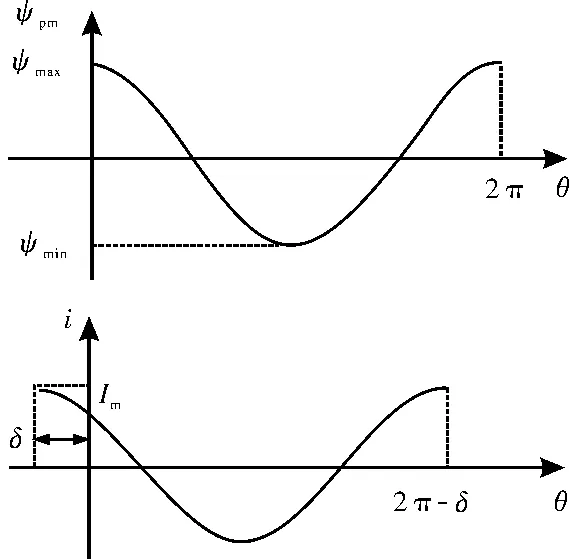
图2 混合式步进电机单相永磁磁链和电流理论波形
采用磁共能法,可求得电机总转矩为[5]
(3)
式中,Tpm为永磁转矩;Tr为磁阻转矩;Tcog为齿槽(定位)转矩;Zr为转子齿数。根据式(1)~式(3),当m相绕组通入对称正弦电流时,可求得
(4)
1.2 结构等效变换
为简化电机分析模型、降低求解计算难度和计算耗时,同时保证较高的计算精度,可将电机三维模型等效变换为二维模型,具体过程如下:
(1)将图1(c)中的转子铁心2转动1/2转子齿距,同时将其每个磁极上的定子绕组全部反向绕制,可得到图3(a),图3(a)同样可等分为两部分V=VI,由于图3(a)和图1(c)相同定子绕组所在磁极的定转子齿相对位置相同、磁极极性相同,因此两者电机结构完全等效,则有III=IV=V=VI。
(2)由于图3(a)与图1(c)电机转子位置相同,可将两者的各1/2部分(如I+VI)组合成新的电机模型,如图3(b)所示,由以上等效变换过程可知,该组合电机模型的结构与原电机三维模型相互等效,两者工作原理完全相同。
(3)图3(b)模型中的定、转子极性可由两块切向充磁且对称放置于定子轭部的永磁体等效产生,如图4所示,该模型的定转子铁心长度与原电机三维模型转子铁心总长度设置为相等。
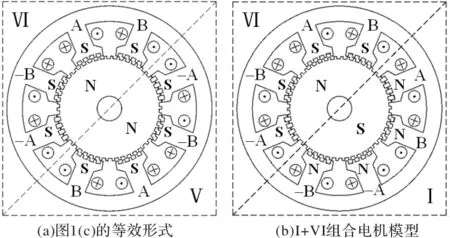
图3 混合式步进电机结构等效变换
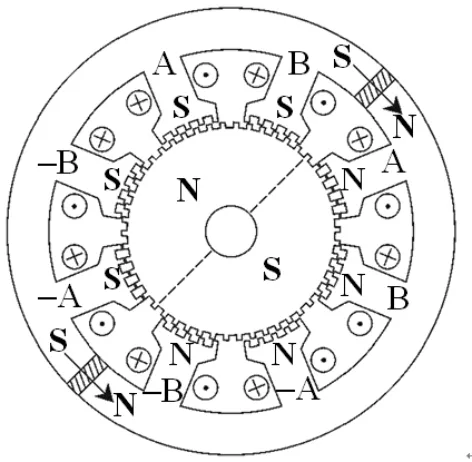
图4 混合式步进电机定子永磁二维等效模型
通过上述结构等效变换得到的新型电机模型结构与原电机三维模型相互等效,工作原理与原电机完全相同,并且永磁体全部放置于定子轭部,因此称作混合式步进电机的定子永磁二维等效模型。该模型中的永磁体沿切向充磁,使得电机内磁场全部分布在径向-圆周平面,因此可采用二维有限元法进行分析计算。
上述变换忽略了铁心叠片间绝缘层磁阻对永磁磁场轴向非均匀分布特性的影响,由此带来一定计算误差,为提高分析计算精度,需建立考虑该影响的更为准确的定子永磁二维等效模型。
1.3 定子永磁二维等效模型建立方法
为考虑铁心叠片间绝缘层磁阻对永磁磁场轴向分布的影响,可将实际混合式步进电机沿轴向分段,并分别建立每段电机对应的二维定子永磁等效磁路模型。具体方法如下:
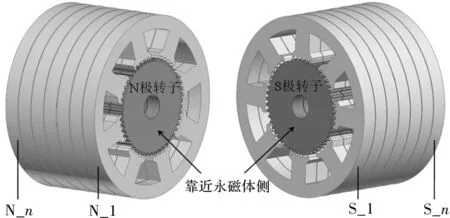
图5 混合式步进电机轴向分段意图
首先将混合式步进电机的转子永磁体以及永磁体所在轴向范围的定子铁心段去除,进而将电机剩余部分沿轴向等分为n段,如图5所示。第i(i=1…n)段电机由第N_i段定转子铁心和第S_i段定转子铁心组成,近似认为其永磁磁场沿轴向均匀分布,并且永磁磁通总量与原电机三维模型在该段电机处的永磁磁通总量相同。
其次采用1.2节结构等效变换的方法建立n段电机的定子永磁二维等效模型,各段二维等效模型的定子永磁体矫顽力及充磁方向厚度与原电机转子永磁体参数相同,并且可通过调整各段二维等效模型的定子永磁体剩磁密度,使得其永磁磁通总量与相应段电机三维模型的永磁磁通总量相同。
最后将n段电机的定子永磁二维等效模型尺寸全部设置为相同,并且设置永磁体径向长度与定子轭部宽度相同,将n段二维模型线性叠加,即可获得考虑铁心叠片间绝缘层磁阻影响的整体混合式步进电机定子永磁二维等效模型。
基于所建立的定子永磁二维等效模型,可采用较为简便的二维有限元法对混合式步进电机进行静态及瞬态分析,极大缩短了三维有限元分析时间、降低了分析难度。同时,由于二维有限元网格剖分密度较高,并且能够有效考虑定转子齿部及轭部铁心局部饱和、定子极间漏磁、铁心叠片绝缘层磁阻等对电机磁场分布及运行性能的影响,因此具有较高的计算精度。
2 定子永磁二维等效模型参数确定
定子永磁二维等效模型的齿层区域尺寸、定子槽尺寸、绕组匝数及线径、永磁体矫顽力及充磁方向厚度等参数与原电机三维模型完全一致,可通过结构等效变换直接确定,而定子轭部宽度(与永磁体径向长度相同)和永磁体剩磁密度两个参数可由如下方法确定。
2.1 定子轭部宽度确定方法
由于齿层区域磁场变化对电机性能的影响远大于其他区域磁场变化的影响,因此分析时可假设三维模型中轴向永磁磁通沿定子冲片横截面均匀分布,二维等效模型中周向永磁磁通沿定子轭部均匀分布。若三维模型定子冲片横截面积为Sz、转子铁心有效总长度为le,二维等效模型定子轭部宽度wys,则根据等效前后全部永磁磁通所穿过的定子磁路有效截面积一致原则可得[14]
Sz=2wysle
(5)
2.2 定子永磁体剩磁密度确定方法
考虑铁心叠片间绝缘层磁阻对永磁磁场分布的影响时,混合式步进电机三维模型中永磁气隙磁密沿电机轴向呈非线性非均匀分布,靠近永磁体的电机段永磁气隙磁密较大,反之较小。在饱和及非线性影响下,解析法计算精度较差,需采用数值法确定二维等效模型的剩磁密度,具体步骤如下:
首先,对电机三维模型进行一次三维有限元空载静态计算,获得永磁气隙磁密沿轴向分布特性曲线。其次,建立单位铁心长度的定子永磁二维等效模型,在不同剩磁密度下进行二维有限元空载静态计算,获得永磁气隙磁密随剩磁密度变化的关系曲线。最终,分别计算n段电机三维模型的永磁气隙磁密平均值,通过曲线插值即可确定各段定子永磁二维等效模型的剩磁密度。
3 定子永磁二维等效模型准确性分析
以一台57BYG型混合式步进电机为研究对象,电机主要参数如表1所示。根据表1数据计算得到Sz=1050mm2,wys= 21.9mm。
对电机三维模型进行一次有限元空载静态计算,得到永磁气隙磁密在单段转子铁心长度范围内的轴向分布如图6所示,最大值与最小值的差值达到0.92T,表明铁心叠片间绝缘层磁阻对永磁磁场轴向分布的影响较大,若将其忽略会导致较大计算误差。对单位铁心长度的二维等效模型进行有限元空载静态计算,得到永磁气隙磁密随剩磁密度变化的曲线如图7所示。
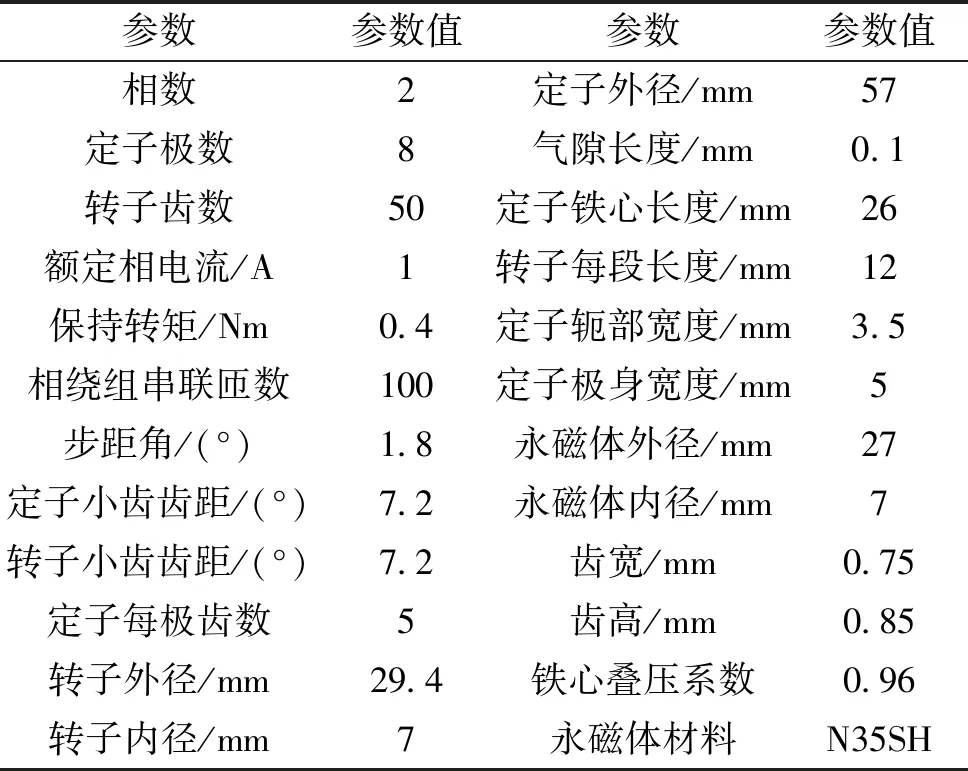
表1 电机主要设计参数
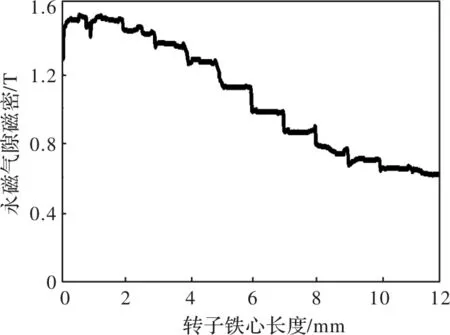
图6 三维模型永磁气隙磁密轴向分布

图7 二维等效模型永磁气隙磁密随剩磁密度变化曲线
将电机三维模型等分为n段时,各段二维等效模型中的永磁体剩磁密度可由图3、图4确定,结果如表2所示。
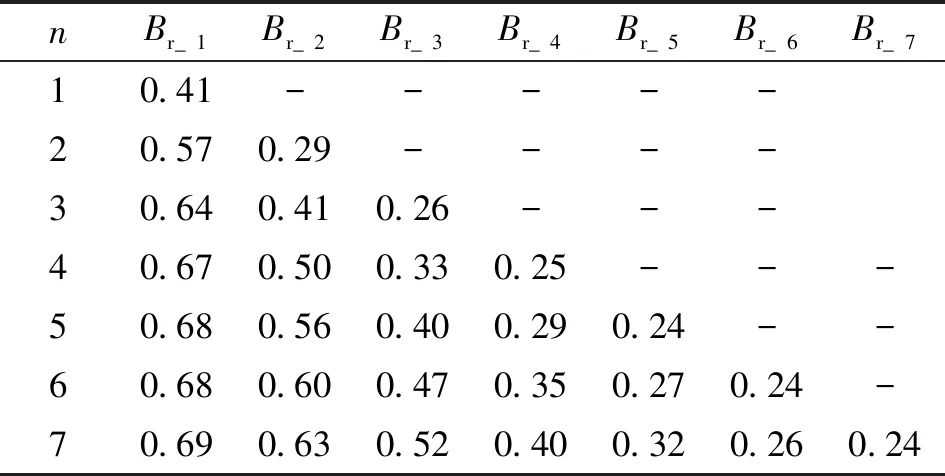
表2 二维定子永磁等效磁路模型剩磁密度
根据表2可建立分段数n=1~7的二维定子永磁等效磁路模型,将二维和三维有限元计算所得额定保持转矩Ten、1.5倍过载保持转矩Te1.5、2倍过载保持转矩Te2进行比较,结果如表3所示。
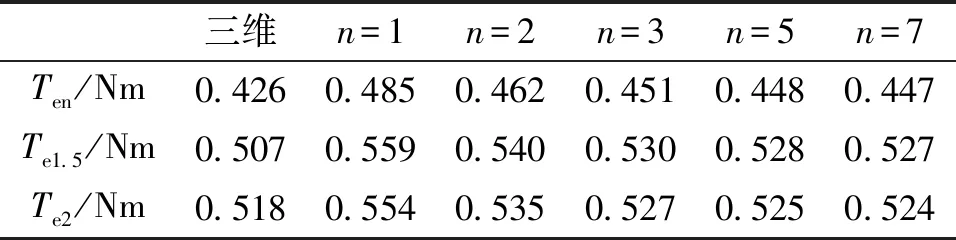
表3 保持转矩计算结果比较
可以看出,当n=1时,额定负载、1.5倍过载、2倍过载计算误差分别达到14%、10%、7%,计算精度较差;当n≥3时,二维有限元计算结果基本不随n变化,额定负载、1.5倍过载、2倍过载计算误差降为5%、4%、2%,计算精度显著提高。保持转矩随相电流变化的曲线如图8所示。
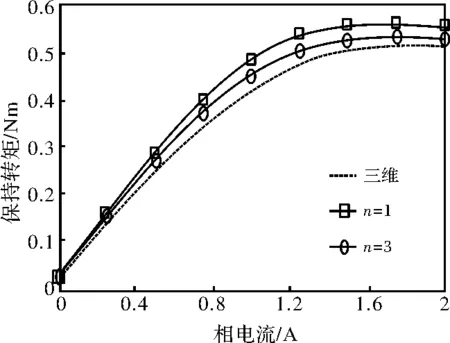
图8 保持转矩随相电流变化曲线
采用二维有限元法计算对应不同分段数n的额定平均输出转矩Tavg、转矩脉动Trip、齿槽(定位)转矩Tcog,结果如表4所示。可以看出,当n≥3时,三者的计算数值基本趋于恒定,即为二维有限元准确计算结果。

表4 Tavg、Trip、Tcog二维有限元计算结果
当n=3时,二维有限元计算所得各段电机的额定负载转矩特性如图9、图10所示,铁心各部分磁密最大值如表5所示。其中,n-1、n-3分别表示靠近、远离永磁体的电机段。
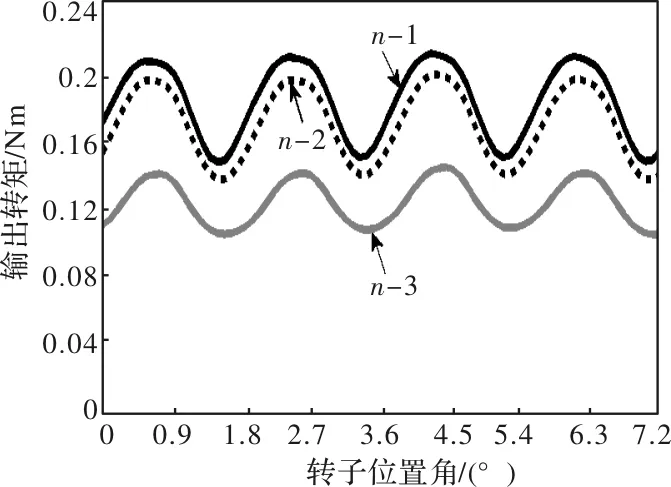
图9 n=3时二维有限元计算所得输出转矩
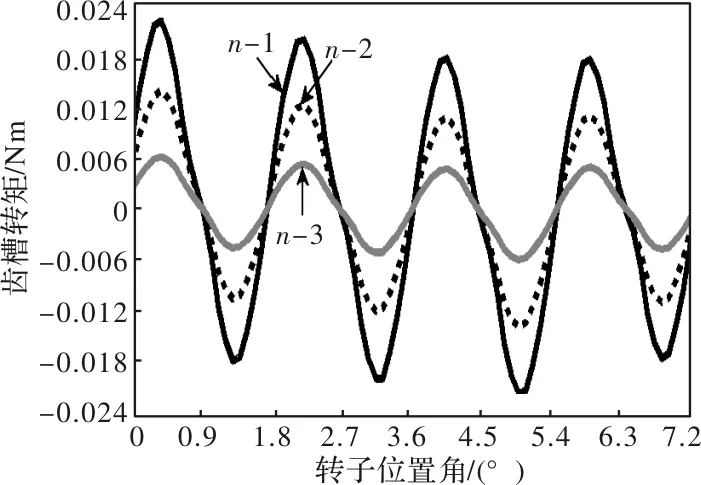
图10 n=3时二维有限元计算所得齿槽转矩
表5 二维有限元计算所得铁心各部分最高磁密
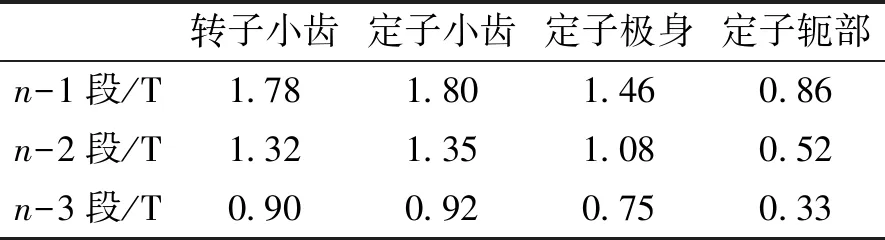
转子小齿定子小齿定子极身定子轭部n-1段/T1.781.801.460.86n-2段/T1.321.351.080.52n-3段/T0.900.920.750.33
可以看出,由于n-1段电机齿层区域铁心饱和比较严重,导致输出转矩平均值降低,与n-2段电机输出转矩平均值近似相等。此外,由于二维等效模型的永磁体放置于定子轭部,导致各定子磁极的永磁磁路不对称[5],这在铁心饱和程度较高时尤为严重。因此,n-1段电机的齿槽转矩在一个齿距周期内的波形对称性较差,导致齿槽转矩脉动值进一步增大。
4 结 论
提出一种基于定子永磁拓扑的混合式步进电机二维等效模型构建方法,基于该模型可采用二维有限元法对电机进行分析计算,相比齿层比磁导法具有更高的计算精度,相比三维有限元法计算更简便、耗时更少,通过理论分析、三维有限元仿真验证,可得出以下结论:
(1)混合式步进电机本身具有的三个特点,即极性相反的两段转子铁心互错1/2转子齿距、同一相绕组中绕制方向相反的两个线圈(如A、-A)所在磁极定转子相对位置互差1/2转子齿距、电机结构沿圆周方向具有周期对称性,是实现三维模型到二维模型结构等效变换的必要前提条件,等效变换前后的两种模型工作原理完全相同。
(2)采用电机轴向分段方法建立的定子永磁二维等效模型,能够有效考虑铁心叠片间绝缘层磁阻对永磁磁场轴向非均匀分布的影响,通常情况下选取分段数n≥3即可获得较高的计算精度,n越小则模型越简单、分析越简便、计算耗时越短。
(3)采用定子永磁二维等效模型计算电机保持转矩时,在各种负载工况下均具有较高的计算精度,额定负载及过载时计算误差可达到5%以内,但由于该模型定子永磁磁路不对称,导致计算所得齿槽转矩和转矩脉动略高于原电机三维模型,这一计算误差可以满足工程计算精度要求。
