双三相永磁同步电动机的改进抗饱和滑模控制
2020-05-29徐福博张智伟高帅军肖景博
齐 歌,徐福博,张智伟,高帅军,肖景博
(1.郑州大学 电气工程学院,郑州 450001;2.美国俄亥俄州立大学 电气与计算机工程系,美国 俄亥俄州 哥伦布 43210;3.国网焦作供电公司,河南 焦作 454150)
0 引 言
永磁同步电动机(Permanent Magnet Synchronous Motor ,PMSM)以其优良的特性而被广泛应用,但在一些航空航天、航母船舰等军事领域和一些重要的工业领域中,传统的永磁电机会受到功率条件的限制,而多相电机可以很好地弥补功率不足的缺陷,并且可以提高整个系统的可靠性。因此对多相电机内部原理和外部输出特性的深入研究显得尤其重要。
双三相永磁同步电动机为多相永磁同步电机中较为典型的一类,相比于普通三相电机,它在低速运行时可以产生较大的电磁转矩且转矩脉动很小,适合应用在直接驱动和大功率传动的场合,同时相比于其他多相电机,它不仅兼顾了多相电机的诸多优点,而且可以直接使用市场上普通的三相逆变器进行供电,极大提高了控制的便利性和经济性[1]。双三相永磁电机是由两个三相绕组对应相错位θ角组成的,当其中一相发生故障时不会影响电机继续运行,可以增加控制系统的可靠性。综上,双三相永磁电动机具有重要的实用价值和广阔的发展前景,对它的控制也成了比较热门的研究方向。
文献[1]详细分析了双三相永磁同步电动机绕组相移30°和180°两种绕组结构时的电磁性能,从理论上分析得出绕组相移180°比绕组相移30°有更好的控制效果,但并未进一步搭建控制系统进行仿真验证。文献[2]建立了双d-q坐标变换下的双三相永磁电机数学模型并采用磁场定向控制方法进行分析,得出了电机输出转速和转矩。文献[3]分析了双三相电机在发生故障时的容错控制策略的不足,重新对故障电机进行解耦运算,从而进一步减小了转矩的脉动。文献[2]和文献[3]对双三相永磁同步电动机的控制性能进行了分析,但仅仅局限于传统的双三相电机,而对于绕组相移180°的情况并没有给出建模过程和控制结果。基于上述分析,本文对双三相永磁同步电动机绕组相移180°的情况进行控制建模仿真分析,并将结果与绕组相移30°进行比较。
因为双三相电机比三相电机内部结构更为复杂,耦合程度更高,所以传统的PI控制很难达到满意的控制效果,因此很有必要对控制方法做进一步的研究。滑模控制(Sliding Mode Control,SMC)因其对参数变化不敏感和响应速度快等优点而被广泛使用。文献[4]针对三相永磁同步电机提出一种利用滑模控制改进的直接转矩控制方法,从而克服了PI控制响应速度慢的问题,提高了抗扰动性能。文献[5]使用一种基于PI和滑模控制结合的控制策略,根据输入值的不同对控制方式进行切换,提高了控制的灵敏性,并可以抑制转矩的脉动。上述文献利用SMC方法取得了很好的结果,但均是应用在三相永磁同步电动机控制系统中,而当前对双三相永磁同步电动机控制策略的研究还比较少,因此本文提出一种改进的SMC策略对双三相永磁同步电动机进行控制。
为了消除静态误差,控制系统中会存在有积分环节,而对于具有滞后控制的电机系统来说,通常的积分环节会引起饱和(Windup)现象[6],导致系统超调增大。因此众多学者基于PI控制提出了一些抗饱和方法,如内模控制法[7]、条件积分法[8]和Anti-reset Windup法[9]等。本文基于SMC提出一种改进的Anti-reset Windup方法,从而抑制饱和现象。
综上,本文提出一种改进的滑模控制方法,减小滑模抖动,提高响应速度;分析了传统的抗饱和方法,提出一种适用于滑模变结构的抗饱和方法,减小系统超调。基于矢量空间解耦方法建立双三相永磁同步电动机两种绕组不同连接方式的数学模型,在Matlab/Simulink下搭建电机矢量控制模型,比较分析改进方法与经典方法的差异性,得出改进方法有一定的优越性,在改进方法下对电机绕组相移30°和180°两种连接方式进行分析,比较电机外部输出特性,得出结论。
1 双三相PMSM的数学模型
因为双三相永磁同步电动机系统异常复杂,所以为了简化建模过程对电机做一定的假设:电机中产生的气隙磁动势和磁密曲线均为正弦波,忽略铁心饱和以及磁滞损耗等,不考虑温度变化对电机内部参数的影响。为了降低控制难度,采用一种矢量空间解耦(Vector Space Decomposition,VSD)方法建立电机的数学方程,该方法把电机各参数投影到三个不同子空间,分别为相互正交的α-β、x-y和零序子空间[10],本文以表贴式双三相永磁同步电动机为例,基于VSD坐标变换方法分别建立绕组相移30°和180°的数学模型,两种绕组方式磁动势分布分别如图1(a)和图1(b)所示。

图1 双三相不同绕组相移磁动势结构图
根据电机原理列出双三相永磁同步电动机数学方程,自然坐标系下的电压和磁链方程为
(1)
ψs=Lsis+ψfλs(θ)
(2)
式中,ψf为永磁体磁链,us、is、Rs、和ψs分别为定子的电压、电流、电阻和磁链矩阵,λs(θ)为磁链系数矩阵,绕组相移30°和180°分别用λs1(θ)和λs2(θ)表示,依次为
us=[uAuBuCuUuVuW]T;
is=[iAiBiCiUiViW]T;
Rs=diag[RRRRRR];
ψs=[ψAψBψCψUψVψW]T;
根据机电能量转换的角度来看,写出电动机的转矩方程:
(3)
式中,np为电机的极对数。
根据电机各变量间关系,建立电机运动方程:
(4)
式中,ωr为电机的机械转速,J为转动惯量,Te为电磁转矩,TL为负载转矩,B为摩擦系数。
由于电机绕组结构不同,相移30°和相移180°从自然坐标系到静止坐标系的变换矩阵也不同,分别为T1和T2。
(5)
(6)
由于在三个子空间中,仅有α-β子空间中的分量参与电机能量转换,所以从静止到旋转坐标系的变换矩阵C2s/2r可简化为
(7)
根据式(1)~式(7),便可得到电机电压方程在d-q旋转坐标系下的表达式为
(8)
转矩方程为
Te=3npiq(ψf+(Ld-Lq)id)
(9)
2 改进滑模控制器设计
滑模控制作为一种非连续性控制方法,以其响应速度快和对系统参数变化不受影响等优点而被广泛应用[11-13]。本文基于对双三相永磁同步电机的结构分析,提出一种改进速度滑模控制器,定义系统状态变量为
(10)

(11)

(12)
根据电机系统实际情况选择滑模面为
s=cx1+x2
(13)
传统的指数趋近律为

(14)
其中,ε>0,k>0,从式(14)中可知,初始阶段,k值越大,响应速度越快,当状态趋近滑模面时,-ks几乎等于零,此时只有ε起作用,ε越小,系统抖振幅度也越小,选择适当的k和ε,可以保证滑模控制的稳定性,但系统的初始状态可能和所设计的滑模面有一定的距离,此时ε可能会很大,容易引起系统抖振,为了解决该问题,设计一种改进的趋近律。
(15)
式中,ε>0,k>0,δ是比较小的正实数。式(15)表明,当s变大时,|x1|2会以平方的关系增大,此时系统将以很大的速度靠近滑模面,而当状态到达滑动模态时,|x1|2将会变得很小,从而使状态量在滑模面周围往复运动时的幅度减小,并最终稳定到原点,即引入了|x1|2之后,改变了趋近律靠近滑模面的速度,可以很好的减小抖振现象的发生。
由式(13)和式(15)可得:
(16)
又由状态方程式(12)可知:
(17)

(18)
为证明滑模控制稳定性,构建Lyapunov函数:
(19)
求导得:
(20)

图2 改进滑模控制结构图
3 抗饱和设计
由于在电机实际控制系统中,为了避免过大电流对电机造成损坏,需要加入饱和装置来限制电流的幅值,而本文所设计控制方法中存在有积分环节,限幅装置和积分环节同时作用就会导致饱和(Windup)现象,使系统的动态性能变差,超调量变大,所以对抗饱和研究有重要的实际意义[14]。
Anti-reset-Windup是现在比较常用的一种抗饱和方法,应用在PI控制中取得了较好的结果,原理框图如图3所示。

图3 Anti-reset-Windup结构框图
根据图3可知,ii与误差e的关系为
(21)
当系统产生饱和时,ii的大小取决于Ti的大小,选取一个适当的Ti,便可抑制饱和效应,减小系统超调量。
当结构处于线性状态的情况下,即ii=io,ii与误差e的关系为
(22)
此时,系统没有饱和,结构变为典型的PI控制。
本文在Anti-reset-Windup方法思路的基础上提出一种适合滑模控制器的抗饱和方法,具体结构如图4所示。

图4 反计算跟踪法结构框图
其原理是在滑模控制中,将限幅控制器前后的值之差作为反馈量输入到积分环节之前构成反馈回路,从而减小积分器的连续输出叠加,从而抑制Windup现象的产生。


(23)
4 仿真结果分析
为了验证所提改进抗饱和滑模控制(Anti-SMC)算法的有效性,在Matlab/simulink平台下,搭建基于Anti-SMC方法的双三相永磁同步电机矢量控制系统,结构框图如图5所示。针对绕组相移30°的双三相永磁同步电机,利用本文提出的改进Anti-SMC和传统SMC进行仿真,比较分析两种控制算法下的输出转速和转矩结果。使用改进Anti-SMC法分别对绕组相移30°和180°进行仿真,比较分析不同绕组相移对输出特性的影响。

图5 基于Anti-SMC法的双三相PMSM矢量控制系统框图
仿真条件及电机参数设置如下:逆变器电压为311V,调制方式使用SPWM,开关频率设为10kHz,定子电阻R=0.418Ω,直轴电感Ld=4.94mH,交轴电感Lq=6.4mH,永磁体磁链ψf=0.18Wb,转动惯量J=0.015kg.m2,极对数p=5。
4.1 改进Anti-SMC与传统SMC仿真比较分析
分别利用改进Anti-SMC和传统SMC方法对绕组相移30°电机进行仿真分析。设置电机空载起动,初始速度值为400r/min,在0.15s时改变负载转矩为15N·m。仿真结果如图6和图7所示。从图6可以看出,在初始起动阶段,改进Anti-SMC方法先于传统SMC方法到达期望速度值,最先达到稳定,并且在整个动态过程几乎无超调;在0.15s突然加入负载时,传统的SMC有较大的转速波动,而改进Anti-SMC则能快速做出反应,并迅速回到稳定状态。由图7可知,不管是电机空载起动初始阶段,还是加入负载时的动态阶段,改进Anti-SMC法都能快于传统的SMC到达稳定。综上,相比于传统的SMC控制算法,本文所提的改进Anti-SMC方法减小了系统超调,提高了系统响应速度和稳定性。

图6 改进Anti-SMC与传统SMC速度响应

图7 改进Anti-SMC与传统SMC转矩响应
4.2 改进Anti-SMC法下不同相移控制性能仿真分析
利用本文提出的改进Anti-SMC控制算法对绕组相移30°和180°进行仿真分析。设置电机运行状态与4.1节相同。仿真结果如图8~图11所示。从图8可以看出,在电机起动阶段,绕组相移180°比相移30°更快达到给定值,在0.15s突然加入负载时,相移180°先于相移30°回到稳定状态,且波动幅度更小。由图9可知,在0.15s突然加入负载时,相移180°的转矩很快便达到稳定值,而相移30°的转矩波动幅度大,稳定性差。图10和图11分别为绕组相移30°和180°时两套绕组对应相的电流曲线,从图中也可以看出对应不同的绕组相移角度,其内部电流也相差相应的角度值。综上可以得出,绕组相移180°相比于相移30°动态响应更快,抗负载扰动性能更好,控制效果更好。
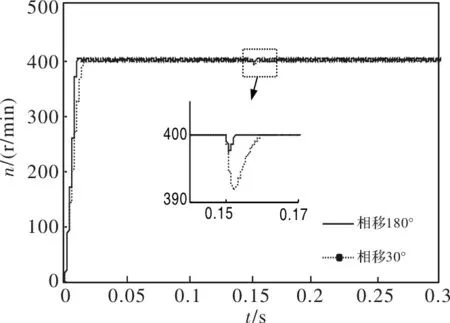
图8 相移30°与180°转速响应

图9 相移30°与180°转矩响应

图10 相移30°电流曲线

图11 相移180°电流响应
对于上述结果的差异性,通过分析可知这与两者内部绕组结构有关,因相移180°的两套绕组在电机内部排列方式为同一套绕组三相相邻,这种排列方式可以有效减小两套绕组之间的互感,提高解耦控制的精度,同时相移180°具有较低的绕组系数,电机内部反电动势中的谐波可以得到有效的抑制,增大了输出波形的平滑度,提高了系统的动态性能。
5 结 论
本文根据双三相永磁同步电动机的结构,建立了绕组相移30°和180°在VSD变换方法下的数学模型,针对电机控制问题,提出了一种基于改进趋近律和符号函数的滑模控制方法,同时为了抑制由于积分环节带来的Windup现象,进一步提高系统动态性能,设计了一种简单的抗饱和方法并应用在滑模控制方法中。在Matlab/simulink仿真平台下构建矢量控制模型,对所改进方法和传统SMC方法进行仿真分析,利用改进方法对相移30°和180°进行比较分析。结果表明,本文提出的改进Anti-SMC方法可以提高系统的动态响应速度和稳定性,减小电机起动时的超调量,保证设备正常运行。绕组相移180°结构相比于相移30°的动态响应性能更好,稳定性更高,更适合于矢量解耦控制。
