基于FPGA的智能交通控制系统设计
2020-05-11石俊杰张雪峰崔宝华
石俊杰 张雪峰 崔宝华

摘 要:本文针对现有交通管理系统已逐渐满足不了交通量增长需要的问题,特别是十字交叉路段,它处于道路交通的瓶颈部位,能否合理的设置该路段关系到整个系统的交通功能。本文专门设计了一种在十字交叉路口使用的智能交通控制系统,在不改变现有道路条件下,根据不同相位车流量的不同调整交通信号灯的启亮时间。
关键词: FPGA ,交通控制,车流量,EDA技术
一、前言
自我国改革开放以来,国民经济持续快速增长与城市化进程的不断提速,汽车保有量也急剧增长,我国城市的[]交通建设却严重滞后,极大影响了人们的正常出行。如何治理城市交通的诸多问题,成为我们当下必须予以优先解决的议题。
传统的交通控制系统多数由单片机或PLC实现,系统是预先设置好固定的配时,无法根据实时交通的具体情况做出适时调整,不利于交通的高效运行。由于传统电路设计存在以上不足,经过研究分析后,本文通过学习研究系统硬件设计、FPGA的开发、QuartusⅡ和Modelsim的软件环境等,确立设计方案。利用FPGA系统开发平台,应用Verilog DHL硬件描述语言,通过QuartusⅡ13.1和Modelsim10.0软件综合仿真,设计出可以根据实时交通车流量的改变,适时调整交通信号灯的时间的智能交通控制系统,弥补了现行交通信号控制系统的不足,有效的缓解了交通秩序问题,提升交通的运行能力,节约能源损耗,提高交通效益,舒缓城市交通拥堵。
二、交通控制系统的硬件设计
为了解决以上问题,本文设计了一种能够根据实时交通的车流量调整各相位交通信号灯启亮时间的智能交通控制系统,该系统能够有效缓解实时交通拥堵现象,提升交叉路口车辆的通行率,达到控制交通的目的。
(一)硬件系统的总体设计
交通系统控制系统由主控模块、计时模块、显示模块、输入模块等组成,每个不同的模块在中央控制器的统一协调下工作实现预期效果。
系统大体工作过程为:电源电路为这个系统供电后,由时钟电路为FPGA系统提供恒定的时钟信号,再由传感器将十字路口的实时交通车流量数据传送到上位機,使用Verilog硬件描述语言编写代码,利用Quartus II 13.1Modelsim SE-64 10.0软件对代码编译、仿真后下载到FPGA芯片上,按键输入是通过交通管理控制人员根据工作经验得出的合理的控制策略调整交通信号灯的启亮时间和倒计时显示,通过以上步骤实现了基于FPGA的交通控制系统的整体设计。
本系统的核心器件是Altera公司生产的Cyclone Ⅳ四代FPGA,四代的FPGA在密度、速度、功耗等多方面明显优化于CycloneⅠ/Ⅱ/Ⅲ系列,属于高容量、低成本的核心器件,开发板外设有SDRAM、串行FLASH、1602、12864、LED、串口、扩展口等,Storm Ⅳ E6有15408个逻辑单元,504KB的嵌入式存储器,4个PLL,20个时钟网络,8个I/O组,40个定制IP软核等专门的功能模块。硬件资源配置:核心器件EPS4配置芯片,4M bit容量 Flash;USB 接口提供电源,50MHZ有源晶振,8个LED发光二极管,4个通用按键,容量为64Mbit的SDRAM,MAX485 接口,RS232 UART 串口,专用时钟输入、输出接口,40 脚扩展接口,16PIN 扩展口,JTAG和 AS 接口等。
(二)交通灯显示电路及倒计时显示
在设计过程中采用单个对应颜色的的发光二极管模拟实时交通道路上的红黄绿灯,时间倒计时显示在共阳极七段数码管上。数码管由七个LED和一个小数点LED构成显示设备,能显现出0-9十个数字和小数点,在实际生活中应用广泛。
本文设计中的交通信号灯的显示电路和倒计时电路如图1所示,分别在东、西、南、北四个方向显示交通现况,电路通过控制端口连接在FPGA开发板上。设置周期为72秒。
(三)车辆检测器的设计
结合实时交通的不同情况采取不同方案,选用不同车辆检测器,当路面处于建设初级阶段或道路翻修期,该种情况下采用环形线圈车辆检测器。对于不方便重修的市政工程、不方便施工的公路路面和不适宜封锁的交通路段选用红外线车辆检测器。本文中根据不同需要选择两种车辆检测器。
1、环形线圈检测电路设计
环形线圈检测器(如图2)可以根据时间间隔的数据推算出时间周期内车流量的多少,将金属线圈L1A和L1B连接在变压器T输入两端,通过四个二极管D1-D4使电压值保持稳定值。振荡电路经过三极管Q2Q3构成的负反馈电路产生了具有恒定值的正弦波形,经过以上环节,金属线圈的L转换成了LC电路的频率,通过LM393和74HC14等元件将正弦波整形、放大、滤波,使输出波形组成整形滤波电路,最后输出具有稳定值边沿波形。最后通过设置NE567外围电路的相关参数,使检测频率检测不到道路上无车通过的频率,当交通中有车驶过,检测到频率,芯片引脚8发生电平变化,此时输出信号为数字信号,将数字信号接入在FPGA的芯片上,通过检测近似方波信号下降沿的数量来检测交通流。
论文中设计的环线线圈车辆检测器应用在同一条车道一定距离内放置两个金属线圈,通过计算车辆进入第一个线圈时脉冲的上升沿和进入第二个线圈时的脉冲上升沿的时间差和放置的两个金属线圈的实际距离,就可以计算出经过线圈的车流量。设置位置如图3。
2、红外线检测电路设计
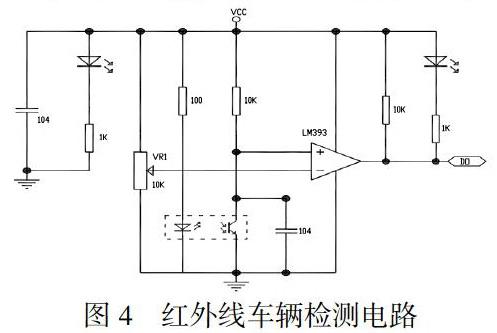
红外车辆检测器是通过微处理器的数字化处理,可以应用到检测车流量和交通使用者的方向。红外车辆检测器对车流量检测,成为城市交通安全重要的监控系统,它在智能交通管理系统中占有一定的地位,是难以割舍的一部分。红外线检测电路的传感器含有一对红外线反射管和接收管,发射管发射出特定频率的红外线,当被检方向遇到反射面时,反射回来的红外线被接收管接收,因比较器LM393具有抗干扰性强、稳定性强等优点,电路设计中采用比较器LM393对电路进行处理之后,实验板上绿灯点亮,信号输出接口输出数字信号为0,该传感器的探测距离可以通过电位器调节阈值比较电压,其具有干扰小、便于设置、安装、维护等特点,非常广泛地应用在车辆检测、计数、循迹等场所。电路如图4。
三、 交通控制系统的软件设计、仿真及验证
本文选用了Verilog硬件描述语言,使用QuartusⅡ13.1和 modelsim10.0对电路进行开发、仿真工作,最后用USB Blaster下载线下载到FPGA开发板中验证是否实现预期功能。
(一)软件设计
通过综合比较、分析几种设计方法的特点,决定此次电路设计方案,运用自顶向下设计方法,整个电路设计大体上可将模块划分为顶层模块、车辆检测模块、车流量统计模块、交通灯控制模块。
顶层模块的主要工作是连接外部电路的信号,包括了时钟的输入、车辆检测器的输入等,负责联系各个子模块之间工作。车辆检测模块的工作是利用车辆检测器对交通道路上的过往车辆进行检测,判断该段交通路段是否有车辆经过,并把检测结果传输到下一个模块进行处理。车流量统计模块是根据上一模块传送的实时交通车量信号进行综合计数,从而得出车流总量,并将得出的数据信号送到后续模块进行比对分析处理。交通灯控制模块接收上一模块的数据信号,对数据信号进行综合处理得出交通灯的相位相应颜色信号灯起亮时间及人行横道上行人通过的情况。为增加电路的随机性加入了串口流量模块和串口流量统计模块。
(二)模块仿真
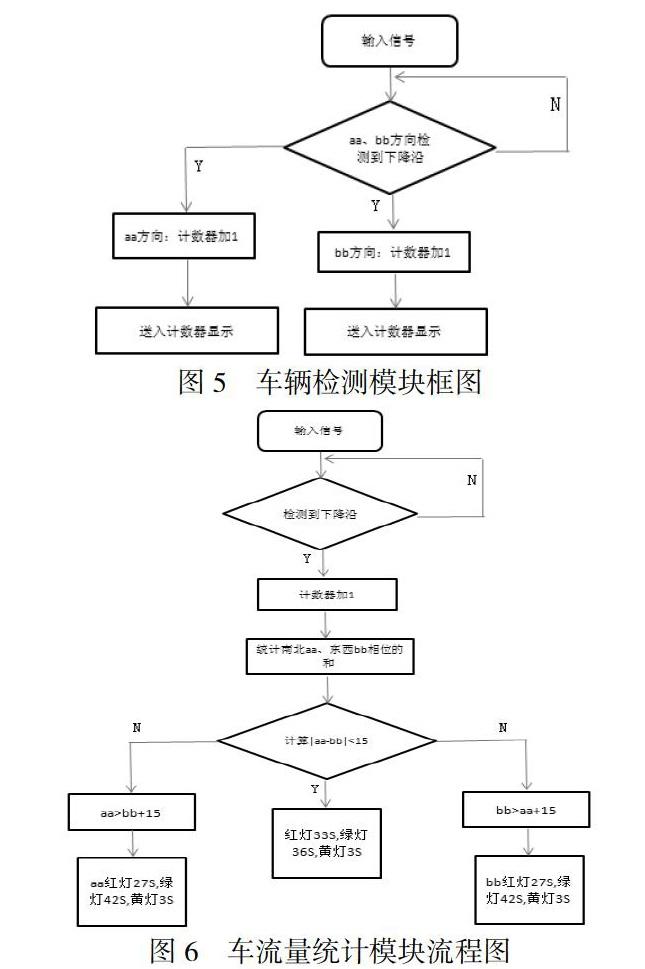
1、车辆检测模块
检测模块是利用红外线车辆检测器对实时交通路段过往车辆进行检测,将检测结果,传送到下一个模块进行综合处理。sensor_south为南北传感器输入, sensor_east为东西方向传感器输入。
2、车流量统计模块
车流量统计模块就是将上一模块传送的检测数据结果进行统计+1计数操作,再将综合处理的数据传送到下一个模块进行比对分析处理。此模块主要是对传感器和串口设置的流量进行监测,一方面将当前的流量值送到下一个显示模块进行显示,另外一个方面是根据两个方向的差值,确定当前的状态,送到交通灯的主模块,进行灯的控制及時间的显示。
3、交通灯控制显示模块
因主模块的控制电路和倒计时显示电路需要的是1KHZ的脉冲信号,而输入的信号为50MHZ,所以利用时钟模块转换为所需脉冲信号。
(1)时钟模块
FPGA时钟引脚接入有源晶振的输出信号为50MHZ,倒计时显示电路需要的是1KHZ的脉冲信号,为了得到电路所需的1HZ稳态的计时信号,本设计中采用时钟电路模块对有源晶振电路50MHZ进行分频。
时钟分频器分为偶分频和奇分频,偶分频的设计原理:设定参考时钟CLK为触发条件来做计数器,每当计数器为(n/2-1)时,输出时钟发生高低平转换。奇分频的原理是:把两个计数器设置成相同的最大值(n-1),但是触发条件是相反的,分别设置条件为上升沿和下降沿,
在时钟分频设计中,首先设定一个计数器为counter、时钟使能信号为clk_1khz,工作时检测到波形的上升沿操作加1,如此循环,当counter=49999999时,counter清零,counter清零后开始工作有效,产生了1KHZ的脉冲信号。
(2)显示模块
程序中需要对红绿灯进行显示控制和各个方向的车流量进行显示,其中这个模块主要完成是当前流量的显示,其实就是一个动态扫描的过程。
(三)系统验证
利用USB Blaster 下载线把已完成设计、仿真环节的交通信号控制系统模块下载固化到 FPGA 芯片中,用于完成整个系统交通信号模块的功能验证。在完成智能交通系统的验证中,用到了FPGA开发板的按键、数码管、时钟分频、串口、JTAG&AS接口等资源。
利用USB Blaster 下载线把设计好的交通信号控制系统模块下载固化 FPGA 芯片中,接通USB接口,连接已设计的交通灯电路,通过调试得出周期为72秒,其中红灯36秒,绿灯为33秒,南北相位及相应人行横道绿灯,东西相位及相应人行横道红灯,如下图7。
通过红外线车辆检测器检测车辆数量或由串口输入数量时,当一相位的车流量大于15时,该相位的绿灯时间增长,红灯时间减少。周期更改为75秒,红灯时间为30秒,绿灯时间为42秒,黄灯时间固定不变3秒,如图8。
经过上文的验证结论表明,本论文中设计的智能交通控制系统可以在硬件中运行,能达到预期设计效果。
四、结语
运用自顶而下的设计方法,应用Verilog硬件描述语言对各个模块编写代码,通过QuartusⅡ13.1和Modelsim10.0进行综合仿真,验证其设计的可靠性和实用性。最后进行电路验证,该设计应用Altera公司生产Cyclone Ⅳ四代型号为EP4CE6E22C8N 的FPGA芯片验证,利用USB Blaster 下载线把设计好的交通信号控制系统模块下载、固化到FPGA 芯片中,连接已设计的交通灯电路,观察、调试、验证整个电路的运行情况,得出结论:该设计电路可以在硬件上实现,达到预期设计效果。
【参考文献】
[1]张国伍,彭宏勤.智能交通系统工程导论.北京:电子工业出版社,2003:4-10
[2] 祁骏.智能交通视频事件流监控系统关键技术研究.硕士论文.东南大学,2014
[3]吴晓华.城市平面交叉口交通信号的智能控制技术研究.硕士论文.武汉理工大学,2006
[4]陈传明.城市道路交通智能控制方法的研究.硕士论文.安徽大学,2005
[5]王瑶.智能交通自适应控制系统的研究与实现.硕士论文.华北电力大学,2005