构架航线在大比例尺航空摄影测量中的应用探讨
2020-05-09万阿芳
万阿芳
摘 要 本文介绍了Imagination(畅想)空三加密软件在有构架航线情况下采用GPS辅助光束法区域网平差进行空三加密在大比例尺测图中应用和精度分析,以数字醴陵地理信息基础工程建设生产为例,并对实施构架航线进行空三加密过程中遇到问题提出了实用建议。
关键词 航空摄影测量;构架航线;GPS辅助光束法区域网平差;空三加密
中图分类号:P231 文献标识码:A
Abstract: This paper introduced the application of the software Imagination in aerial triangulation of large-scale topographic mapping using GPS-supported bundle block adjustment under the constraint of control ship, and the measurement precision is analyzed. Taking the geographic information foundation project of digital Liling for example, some practical suggestions are presented to solve the problems encountered in the practice of the aerial triangula?tio?n under the constraint of control strip.
Keywords: aerial photogrammetry; control strip; GPS-supported bundle block adjustment; aerial triangulation
1 引言
近年来,随着航空摄像测量技术的不断发展,构架航线在航空摄影中已开始被普遍使用。常规的“4条航线乘15条基线”是在区域网布设像控点,区域往中间增加一个检查点的布点方案,像控点布设需要满足6度重叠情况,对位置的要求较高,且平面和高程的精度直接影响内业的精度。而构架航线空三加密是在区域网的四个角各布设一个平高控制点,同时在区域网两端近似垂直于航线方向敷设两条构架航线,逐条航线进行航摄漂移误差改正,可大量减少对地面像控点数量的需求。
在实际生产中,构架航线的敷设对航飞质量要求较高,且目前大多生产应用的空三加密软件如Inpho软件,是基于POS/IMU的GPS辅助空中三角测量方法,对POS数据精度要求较高,需要地面基准站进行差分运算,但由于IMU的测角精度较低,导致仍需要较多地面控制点参与平差解算来保证空三加密精度。因此,在数字醴陵测区我们用Imagination空三加密软件软件,利用机载GPS/BD辅助技术,不使用POS数据中的3个角元素,将航空摄影时间参数作为有效观测值参与区域网平差进行空三加密,来对构架航线在大比例尺航空摄影测量中的应用进行探讨和分析。
2 构架航线铺设及方案
2.1 实验区概况
实验区为数字醴陵地理信息基础工程建设项目中一个加密分区。醴陵市处于东经112°-114°,北纬26°-28°,地处湖南省东部,罗霄山脉北段西沿,位于长沙,株洲,湘潭“金三角”经济区东南部,地貌以山地,丘陵和岗地为主。该分区面积约1200平方公里,为丘陵地形,北部以山区为主。
2.2 航摄情况和测区参数
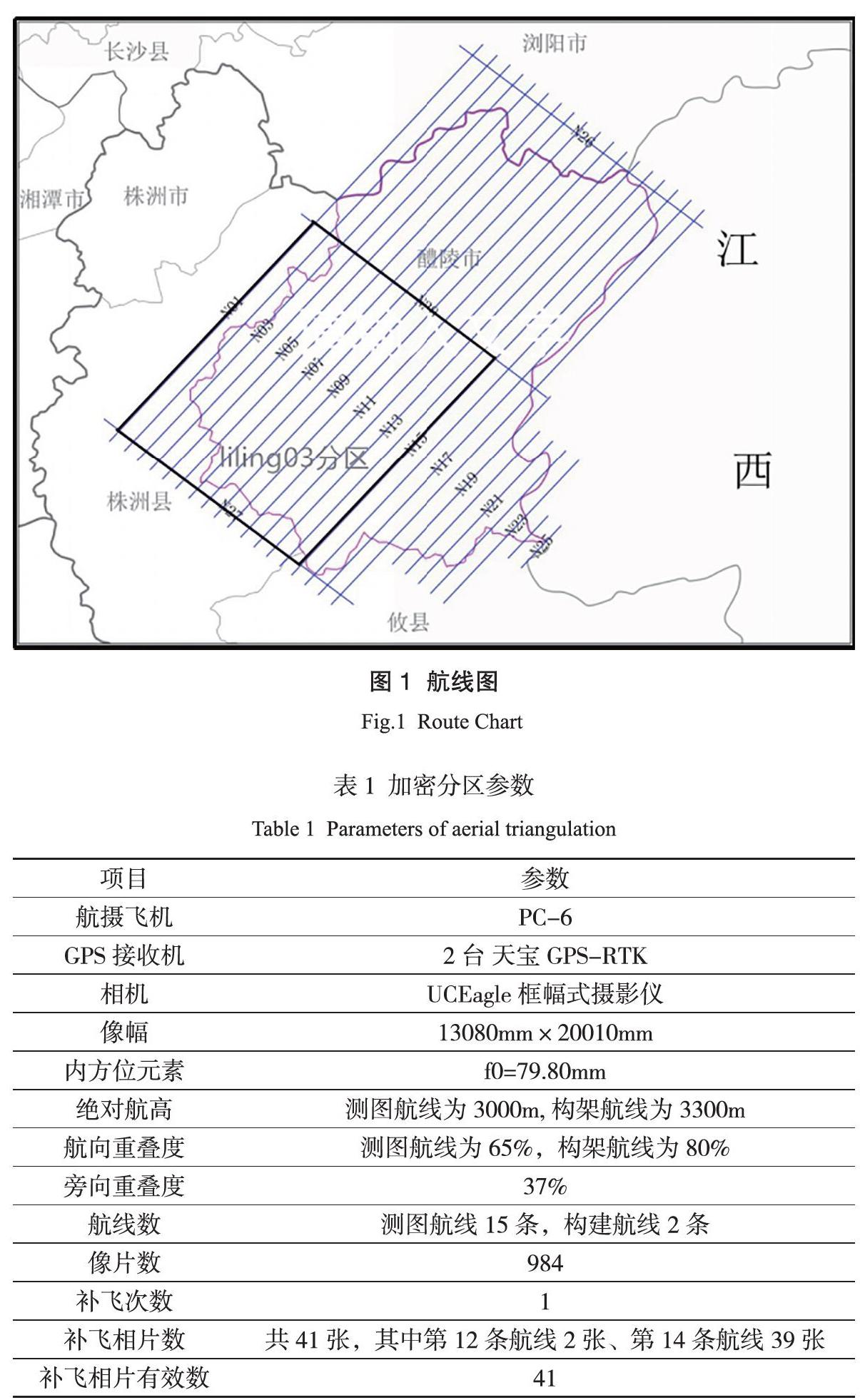
本实验区有测图航线N01-N15和构架航线N27-N28共17条航线,其中区域内第12、14条航线共有两条补飞航线,如图1:
醴陵摄区摄影使用PC-6飞机搭载UCEagle航摄仪进行,采用IMU/GPS辅助航空摄影,无地面基站,其相关参数如表1。
2.3 像控布点情况和构架航线航摄要求
2.3.1 像控布点
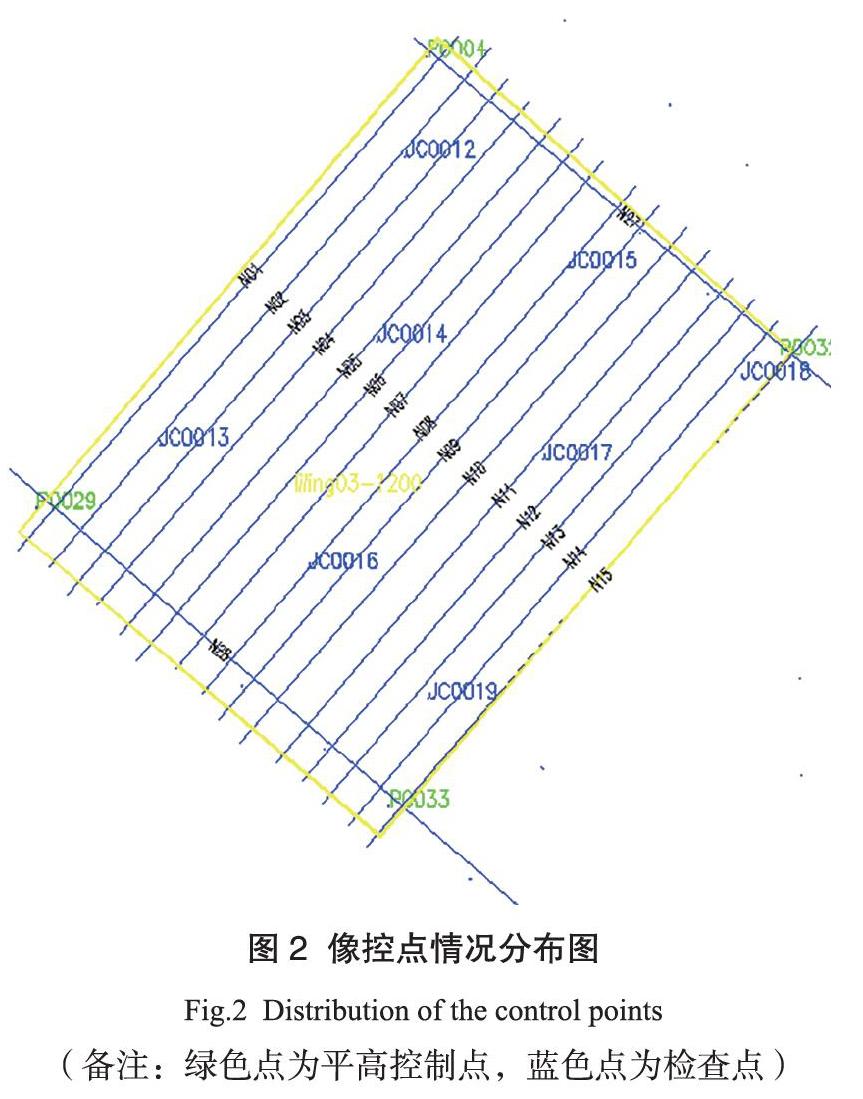
只需在构架航线与测图航线的交点区域处布点就行,不用考虑常规像控布点的6度重叠情况。本实验在加密分区四角布设一个平高控制点,在加密分区中间均匀布设检查点,共布设4个平高像控点,8个检查点。具体布点方案如图2。
2.3.2 构架航线航摄要求
构架航线的摄影比例尺应比测图航线的摄影比例尺大25%左右,航向重叠度不少于80%,以保证隔号像片能构成正常重叠的立体像对。同时构架航线间的交叉衔接处,要保证有不少于四条基线的相互重叠。构架航线如其本身出现局部的相对漏洞或有其他缺陷(如:云影、脱膜、斑痕等),在不影响整条航线内业加密选点和模型连接的情况下可不补摄。凡需要补摄时,应整条航线重摄。构架航线由于相机脉冲输出装置故障引起的时标信号丢失,在一条航线上连续不超过三张时,不必补摄,当构架航线出现GPS摄站丢失时,应整条航线重摄。
2.4 空三加密流程
将整理好的含线元素和时间元素的POS数据导入Imagination软件,自动创建测区,根据相机检校报告设置相机基本参数、编辑航线创建立体相对、内定向、提取连接点、根据像控点点之记精准观测每个像控点的点位进行像控点量测、运行GPS辅助光束法区域网平差,查看平差计算结果生成的各个记录文件。
這次实验中,构架航线和测图航线由于航高不一致,且航线存在旋偏,构架航线和测图航线影响同名点匹配较差,连接点提取数量不够,存在误差较大的连接点,需要剔除后手工添加再进行误匹配探查。所以,在以后的构架航线的机载GPS辅助空三加密中,重点要注意架航线与测图航线之间的连接点分布是否合理,是否每个标准点位都有连接点。
2.5 精度分析
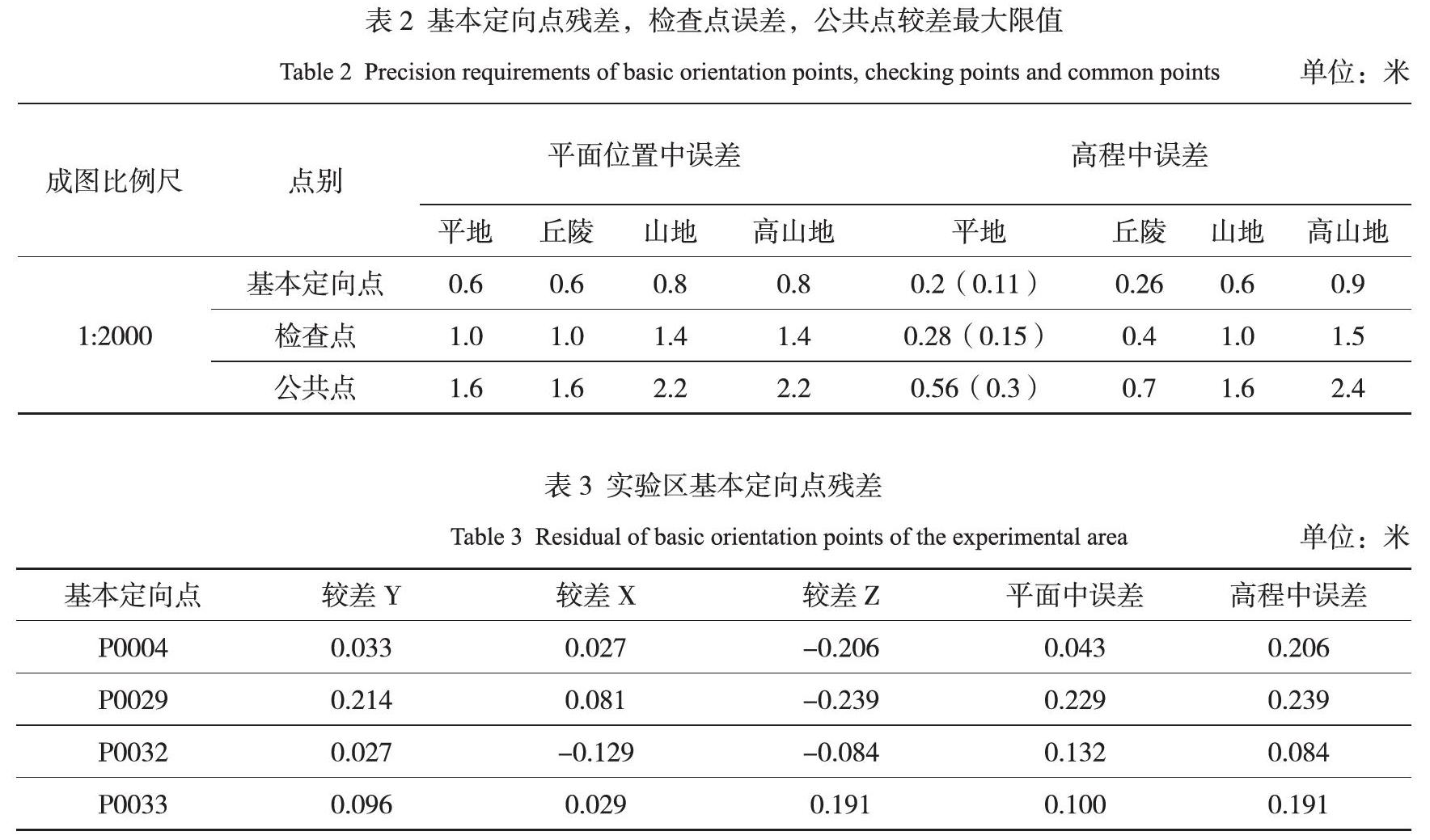
本实验测区生产1:2000大比例尺地形图数据,按照技术设计要求,空三精度要求如表2所示:
经过平差软件计算,得到空三精度报告如表3。
(1)基本定向点残差
由表3可见,控制点钟平面中误差最大为0.229米,允许误差0.6米,高程中误差最大0.239米,允许误差为0.26米,均满足规范要求。
(2)检查点精度情况
由表4可见,本加密分区检查点平面误差最大值0.464米,允许误差1.0米。高程最大误差为0.269,允许误差为0.4米。均满足规范要求。
(3)外业精度检测情况
为进一步验证空三加密成果的精度情况,恢复立体模型,在范围内选取部分地物纹理清晰,特征明显的位置,采集同名点,进行外业实测,比较两者之差。具体外业检测点情况分布如表5所示:
外业采用GPS-RTK采集了22个特征点,最大平面差值为 0.507 米,允許误差为2.4米,最大高程差值为 0.354 米,允许误差为 1米,均满足规范要求。
3 有构架航线空三加密过程经验探讨
(1)构架航线必须一次性进行,不能补飞。测图航摄航线每条补飞不宜超过2次,否则必须增加像控点。在本次实验的另一个加密分区,因有多条补飞航线,只在分区四角布设一个平高点的方法进行空三加密时,加密的高程精度超出了限差。之后在补飞航线与原航线重叠处,添加部分像控点后才使得平差结果满足精度要求,所以在平时的空三加密作业中要特别注意补飞情况。
(2)区域网中间的检查点最好布设在地形变换处和补飞航线与原航线重叠区域。
(3)注意连接点情况。把一些误差较大的连接点参与到平差计算,会影响局部区域的平差精度。在这次实验中,我们发现构架航线与测图航线间连接点匹配较差,补飞影像与首次航摄的影像之间连接点匹配较差,植被覆盖区域或者纹理不明显的位置自动提取的连接点误差较大、大面积水域的情况下缺少连接点。
4 总结
通过检测数据表明,采用Imagination空三加密软件,有构架航线下的情况下采用少量像控布点,利用GPS辅助光束法区域网平差实行空三加密成果完全满足大比例尺成图的精度要求,可以减少大量外业工作量,降低生产成本同时也缩短了工期。在生产中注意补飞以及连接点的情况,可以提高工作效率,在实际生产中有很大意义。随着无人机航摄的广泛应用,在不使用地面控制或只通过少量地面控制点,通过增加垂直于基本航线的构架航线和GNSS辅助空中三角测量对无人机航摄空三加密提高平差精度和增加区域网之间的连续性都将有较大帮助。但目前无人机航摄获取的影像质量不高,具体如何合理布设航线和设置航摄参数,用较少的工作量得到较高的空三加密成果,需要在以后实际工作中,积累更多的经验。
参考文献/References
[1]袁修孝 GPS辅助空中三角测量原理及应用[M].测绘出版社 2001.
[2] 金为铣,杨先宏,邵宏潮等.摄影测量学[M].武汉大学出版社 2001.
[3] 张剑清,潘励,王树根.摄影测量学[M].武汉大学出版社 2004.
[4] 杨传玲 航空摄影测量新技术的应用与发展[J].中国高新技术企业2007.
[5] 袁修孝,李德仁. GPS辅助空中三角测量的若干探讨.[J].武汉测绘科技大学学报 1997.
