室内未知环境下动态障碍物定位研究
2020-05-09尹皓王利利
尹皓 王利利

摘 要:针对室内未知环境下的动态障碍物定位,提出了一种基于形态学滤波与混合高斯模型的Background Subtractor MOG2算法相结合的动态障碍物定位,并通过一种以针孔模型为原理的视觉测距模型方法,计算出图像坐标与世界坐标的几何关系,绘制了一定比例的局部地图,通过对环境以及障碍物的真实位置与构建的局部地图对比试验,验证了采用此方法对动态障碍物定位的准确性。
关键词:室内未知环境;视觉;动态障碍物定位;局部地图构建
中图分类号:TB 文献标识码:A doi:10.19311/j.cnki.1672-3198.2020.08.101
0 引言
室内未知环境下障碍物的定位一直是室内移动机器人环境感知能力研究的热门,因摄像头成本较低,市场接受度较高,其本身拥有其他传感器没有的大视野,在实用上视觉技术使用方法灵活,可根据应用场景的选择不同的测量方法,而且质量轻,适用于任意的机器人实物平台,所以视觉定位在目前机器人定位领域上占据很重要的位置。但摄像头因接受的环境信息量大,需要处理的环境噪音复杂多变,且障碍物种类和情况多变,传统的静态障碍物检测算法很难精确定位动态障碍物的位置。近年来,对于视觉定位应用在障碍物的定位问题,郑争光提出了自适应阈值法对环境图像分割等。但此类方法某些光噪音干扰过大的场景不能很好的分割,而且对动态物体的检测效果很差,为下一步的地图构建的误差埋下伏笔。文献基于高斯混合模型的多车道车流量检测算法能检测出动态的车辆,且鲁棒性好实用性强。受其启发,本文针对环境噪音做了处理,以及使用一种基于混合高斯模型去除背景法优化的算法(视频背景去除建模Background Subtractor MOG2)来寻找摄像头中的动态障碍物,并对图像中障碍物信息标注,利用小孔成像原理测量出障碍物距离与机器人之间的距离,并根据测量出比率指标计算障碍物尺寸,最后根据得到的数据构建环境地图。本文方法处理后的消除环境噪音产生的影响,生成的动态障碍物轮廓清晰,局部地图构建误差较小并能预判移动方向。此方法能够满足室内动态障碍物检测与地图构建需要的精度,为以后的室内障碍物检测精度的分析提供了依据。
1 基于Background Subtractor MOG2的动态障碍物识别与定位
1.1 动态障碍物及其轮廓检测
摄像头接受了大量的环境信息,但并不是所有环境信息对障碍物的定位都是有效的。因此需要对图像作预处理,提升图片对比度并降低图像噪音,消除无用的环境信息,提高有用的信息比例。主要方法为图像滤波,图像的膨胀和腐蚀。首先,对视像头每一帧的图像进行灰度化(图2),这样减少了由RGB三通道变为单通道,不失环境细节,且减轻了运算负担。其次,对图像进行中值滤波操作(图3),目的是消除孤立点,并去除脉冲噪声和椒盐噪声,提高特征抽取和识别的可靠性。
目标图像经过滤波处理后,采用Background Subtractor MOG2算法。Background Subtractor MOG2算法是以高斯混合模型为基础的背景/前景分割算法。相比于其他的物体识别定位算法,这个算法的特点是它为每个像素选择一个合适数目的高斯分布。这样就会对亮光等发生变化引起的场景变化产生更好的适应。在实际应用此算法时选择检测阴影,这样就不会应为物体或灯光的阴影而影响检测结果,大大的减少了外界环境的干扰。有别于其他文献中阈值分割的障碍物检测方法,在寻找障碍物时采用这种算法可以在移动机器人移动时检测到障碍物,且能在一定光线的照射下较为准确地识别障碍物在相机坐标中的位置,增强了移动机器人在室内环境下的适应能力,识别运动中的物体(图4)。
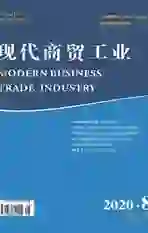
在不影响障碍物总的位置和形状的前提下,为了除去孤立的小点,毛刺和小桥,目的是防止地面上的纹理以及地面上细小的反射物带来的影响,通过形态学运算(图5),先进行腐蚀操作,再进行膨胀操作。第二次进行膨胀消去障碍物图中的黑色点,第二次进行腐蚀维持障碍物形状(图6)。对处理后的图像的轮廓进行寻找,找到轮廓后对轮廓内的像素点通过凸包检测(图7)可以包住轮廓点集中的所有点,避免因没有识别到障碍物突起的形状造成局部地图构建的误差,对机器人的正常行驶造成干扰。再次对凸包点集中做生成最小外接矩形(图8),得到处理后的中心,以及长、宽,以中心为障碍物中心点。且在源图像中画出最小外接矩形,判断识别误差,方便给出局部地图构建时的误差。
2 矫正方向及局部地图构建
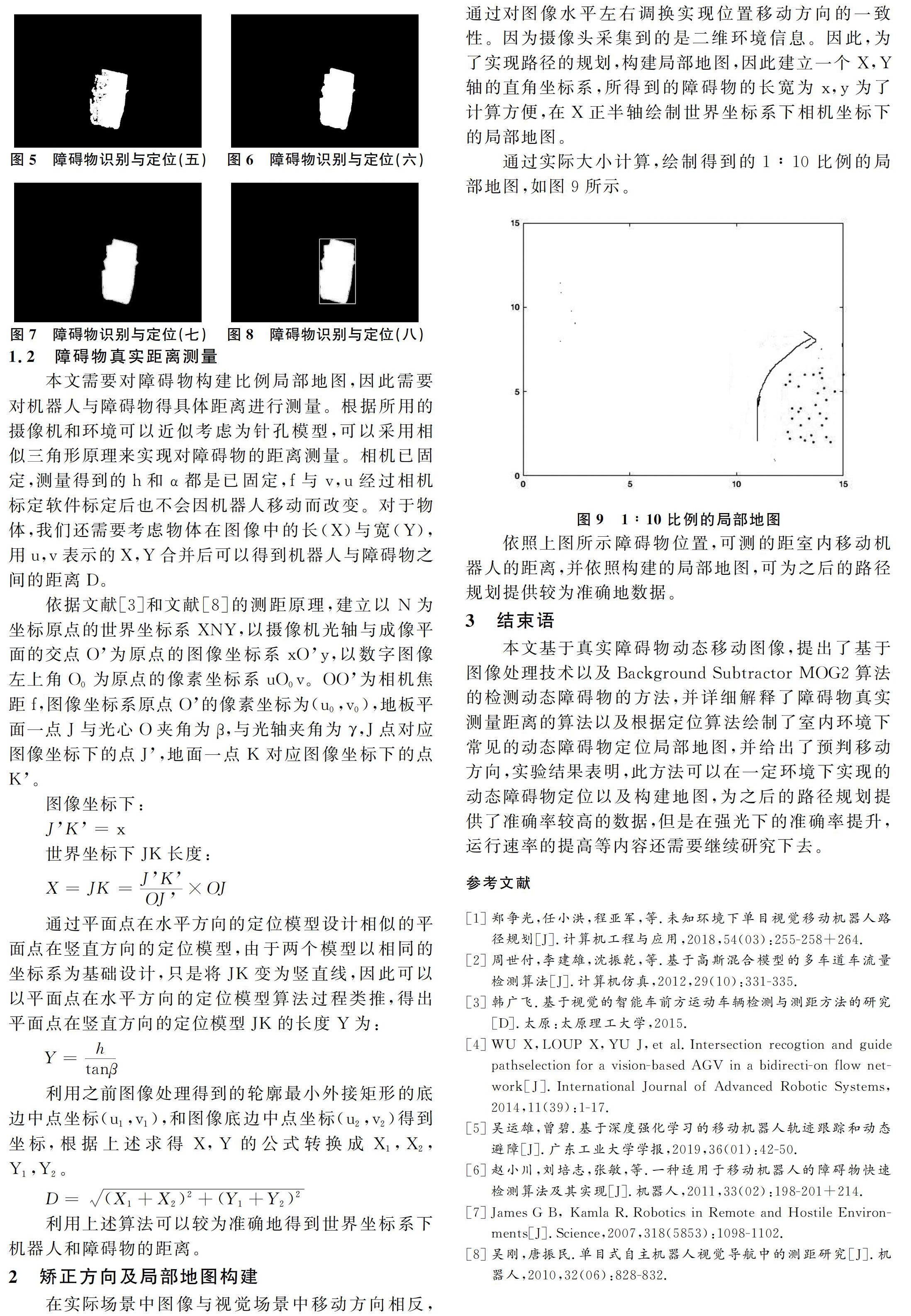
在实际场景中图像与视觉场景中移动方向相反,通过对图像水平左右调换实现位置移动方向的一致性。因为摄像头采集到的是二维环境信息。因此,为了实现路径的规划,构建局部地图,因此建立一个X,Y轴的直角坐标系,所得到的障碍物的长宽为x,y为了计算方便,在X正半轴绘制世界坐标系下相机坐标下的局部地图。
通过实际大小计算,绘制得到的1∶10比例的局部地图,如图9所示。
依照上图所示障碍物位置,可测的距室内移动机器人的距离,并依照构建的局部地图,可为之后的路径规划提供较为准确地数据。
3 结束语
本文基于真实障碍物动态移动图像,提出了基于图像处理技术以及Background Subtractor MOG2算法的检测动态障碍物的方法,并详细解释了障碍物真实测量距离的算法以及根据定位算法绘制了室内环境下常见的动态障碍物定位局部地图,并给出了预判移动方向,实验结果表明,此方法可以在一定环境下实现的动态障碍物定位以及构建地图,为之后的路径规划提供了准确率较高的数据,但是在强光下的准确率提升,运行速率的提高等内容还需要继续研究下去。
参考文献
[1]郑争光,任小洪,程亚军,等.未知环境下单目视觉移动机器人路径规划[J].计算机工程与应用,2018,54(03):255-258+264.
[2]周世付,李建雄,沈振乾,等.基于高斯混合模型的多車道车流量检测算法[J].计算机仿真,2012,29(10):331-335.
[3]韩广飞.基于视觉的智能车前方运动车辆检测与测距方法的研究[D].太原:太原理工大学,2015.
[4]WU X,LOUP X,YU J,et al.Intersection recogtion and guide pathselection for a vision-based AGV in a bidirecti-on flow network[J].International Journal of Advanced Robotic Systems,2014,11(39):1-17.
[5]吴运雄,曾碧.基于深度强化学习的移动机器人轨迹跟踪和动态避障[J].广东工业大学学报,2019,36(01):42-50.
[6]赵小川,刘培志,张敏,等.一种适用于移动机器人的障碍物快速检测算法及其实现[J].机器人,2011,33(02):198-201+214.
[7]James G B, Kamla R.Robotics in Remote and Hostile Environments[J].Science,2007,318(5853):1098-1102.
[8]吴刚,唐振民.单目式自主机器人视觉导航中的测距研究[J].机器人,2010,32(06):828-832.