涡轮排烟消防机器人避障系统设计
2020-05-08李龙宋崇智张长平伍德林姚小军
李龙, 宋崇智, 张长平, 伍德林, 姚小军
(1.安徽工业大学 工程研究院,安徽 马鞍山243032;2.马鞍山经纬回转支承有限公司,安徽 马鞍山243032)
0 引 言
消防机器人由原来单一功能灭火机器人到如今的具有感知功能的机器人,在技术上取得了卓越的进步[1-2],其中包括仿生技术、控制技术、传感技术、机电液一体化技术等机器人特定领域技术。消防机器人的避障问题正成为控制技术领域研究热点,目前已经取得显著的成果。Saygin等[3-4]设计制造了一种配备早期的火灾探测单元机器人平台,通过对运动单元路径的规划及虚拟环境进行跟踪,实现机器人简单避障。Li等[5]采用多传感器优化设计的方法,对消防机器人的避障系统进行设计。机器人采用光电传感器进行避障,并将粒子优化算法应用于避障系统软件设计中,提高消防机器人的灵敏度。王军华等[6]根据消防机器人在工作时对于障碍物的如何快速检测问题,提出了一种基于随机采样的双目障碍检测算法,通过两个处于同一基准线上的两个摄像头,提取火场环境的平面模型,采用预检验法和内点阈值限定法采样估计,能快速、准确地检验障碍,实现机器人对障碍的规避。上述采取的避障方案优点是能够在短时间内规划出机器人最佳避障路径,可以解决特殊火灾现场机器人的避障问题。缺点是随着环境量的变化,需要不断地计算规划路径,难以适应复杂的实际火场环境。实际的火场是处于动态的未知环境,目前应用于未知环境的避障算法主要有神经网络算法、仿生算法、遗传算法等[7]。上述算法优点是能够很好解决机器人在未知动态环境下的避障问题,缺点是所需要考虑的参数较多,计算量过大,占据较大的运算时间和储存空间,而且对环境的要求苛刻,造成消防机器人的实时性很差。
本文采用超声波传感器叠加方案对消防机器人在环境中的障碍信息进行采集,然后直接反馈给车载中心,经过信息比对后控制机器人的运动方式的避障方案。有效避免控制器对路径进行重复规划,减小控制器的计算量,在实现准确避障要求的同时,提高消防机器人避障系统实时性和实用性。消防机器人避障系统主要由控制器模块、电源模块、超声波模块、行走模块及报警模块5个主要模块组成,控制模型如图1所示。
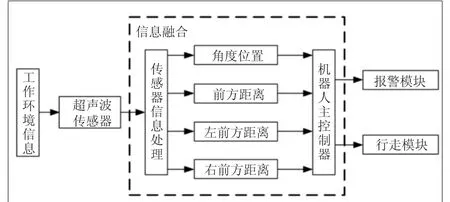
图1 避障控制模型
主要的工作流程为:消防机器人在复杂的灭火环境中触发局部自治功能时,此时超声波传感器开始启动,向机器人的周围发射超声波,并将所探测的超声波信号传送给PLC可编辑控制器,控制器根据传送过来的信号,规划消防机器人运动方式,对障碍进行有效规避。
1 消防机器人运动和避障分析
1.1 运动分析
消防机器人采用履带底盘结构,由两个液压马达进行驱动,为履带的转动提供牵引力。消防机器人的运动模型如图2所示。
假设机器人处于理想的运动状态,机器人的中心点为O点,经过一段时间后,机器人的运动偏转角度为θ,左履带的速度为vL,右履带的速度为vR,r为中心的曲率半径,b为消防机器人的宽度,此时左履带的曲率半径为r-b/2;右履带的曲率半径为r+b/2,设履带的角速度为ω,因此机器人的左右履带的速度表达式为:

图2 机器人运动模型

式中,ω为机器人履带的角速度。
由式(1)、式(2)可得机器人的履带角速度为

由式(3)可得机器人中心的速度为

中心速度又为

根据式(4)、式(5)可得r为

由式(6)可知,当机器人的左右履带的速度相同时,r为无穷大,此时机器人作直线运动,当左右履带速度都为正值时,机器人前进;反之,后退。当两履带的速度相等而方向不同时,机器人此时原地旋转,当两履带的速度大小不等时,机器人绕中心点作曲线运动,实现左转、右转、左退、右退。当机器人在运动时,设机器人的运动时间非常小,此时机器人的线速度和角速度则为常数,具体为:

由式(7)~式(9)可知,机器人的瞬时速度与车体的方向相同,根据左右履带的速度差就可以改变机器人的运动状态,通过合理规划左右履带的速度就可以使机器人行走不同曲率的曲线。
1.2 避障分析
当机器人的传感器探测到前方有障碍物时,其控制器会首先判断其是否在安全距离以内,从而选择是否进行避障。若此时的距离在安全距离之外,机器人会保持原有的指令工作。若此时的距离在安全距离之内,此时机器人就会减慢速度,通过主控制器规划前进的方向,对障碍物进行避障。设机器人的运动速度为v,安全距离为d,当障碍物的距离小于d时,机器人会向左转向,从而对障碍物进行避障,如图3所示。由图可知,避障安全的距离与消防机器人运动轨迹的半径是相等的。
一般情况下,消防机器人对周围障碍物的检测来源于消防机器人周围的超声波传感器传送回来的电信号。实际工作环境中的障碍物的出现情况多种多样,一般情况可分为8种[8],如图4所示。

图3 前方避障示意图

图4 遇障情况示意图
当消防机器人的正对的两侧有障碍物时,不会影响消防机器人的正常前进。当消防机器人与障碍物之间的夹角越小时,发生碰撞的概率就会越大。所以只需要考虑消防机器人的正前方及两侧前方之间的组合的几种情况。将所采集的d1、d2、d3、d4、d5、d6等6个超声波数据与所测得的dr1、dr2、dr3等3个数据分别组成3个数组,代表机器人3个方向的障碍物的信息,用dL、dF、dR表示,其中dL=(d1,dr1,d2),dF=(d3,dr2,d4),dR=(d5,dr3,d6)。
当消防机器人的正前方无障碍、两侧有障碍物时,此时消防机器人会执行原有的动作指令。如图4(a)、图4(f)所示。
2 硬件和软件设计
2.1 硬件设计
控制模块选用C201可编辑控制器作为避障系统的控制中心,也是整个消防机器人电控系统的核心。相对于其他控制方式,PLC控制器抗干扰能力强,故障率低,便于维护,其开发的周期相对较短,在特种机器人控制方面的硬、软件设备与实际应用的匹配最好。而且编辑控制器上有大量的开关量和模拟量输入端口及开关输出端口。在CAN的通讯系统下与其他的传感器和执行器等元件的配合下,可作为多功能的控制器使用。
测距模块选用超声波测距。超声波是一种机械波,它的振动频率在20 kHz以上,具有很强的穿透性及很好的方位特性,在传输信号的过程中有很好的信号反射能力和抗衰减能力。所以其是应用在测距、定位避障等工程方面首选传感器。超声波传感器主要由超声波发射器、接收器和信号处理装置3个部分构成。其测距原理为:发射器不断地发射一定功率的超声波信号,当其传播遇到障碍物时就会被反射,此时接收器可以接收到被反射的信号。通过时间间隔Δt 与在空气中传播的速度,就可以判断与障碍的距离D,公式如下:

式中:D为障碍物与机器人之间的距离;Δt 为时间间隔;T为机器人工作环境中的温度。其测距原理如图5所示。
超声波传感器与红外传感器及激光传感器相比,具有结构简单、价格低、耐脏耐尘等特点。而且其穿透的能力比较强,能够在黑夜及其它恶劣的环境中使用。但是超声波测距存在一定的盲区,会对障碍的检测造成一定的偏差,通常是与其它传感器相互配合使用提高对障碍检测的精确度。红外传感器和激光传感器对于使用环境要求较高,价格昂贵,而且难以适应复杂火场环境。为减少不必要的视觉盲区,本文采用叠加超声波传感器设计方案,通过多个超声波传感器提高机器人对于障碍物的检测。此外,该方案在软件的处理方面也更容易,只需要重复叠加超声波传感器的程序,避免了对一些较多子程序进行来回的扫描,减少控制中心的计算时间,有效提高消防机器人的实时性。本文采取了8个超声波传感器提高消防机器人对障碍检测性能。其硬件接线图如图6所示。

图5 测距原理图

图6 避障系统电路原理图
本文选用的是US200-18A高频型收发一体的铝壳超声波传感器。该传感器的测量精度和灵敏度比较高,具有一定的光线、火灾烟雾及电磁抗干扰能力,而且连接电路比较简单,便于更换,符合机器人工作的复杂环境要求。超声波的具体参数如表1所示。

表1 超声传感器技术参数
2.2 软件设计
避障主程序如图7 所示。首先引用宏文件,然后在对定义的子程序进行初始化,对消防机器人的驱动系统进行启动,再对超声波传感器发送一个持续8 μs的高电平启动信号,使其开始对周围的障碍进行检测。
如果左侧控制器给出的是一个高电平,则表明左侧无障碍,即向左转向,反之则右转。在机器人转向的过程之中,控制器会对超声波传感器发出控制指令,使其每150 μs检测周围障碍的距离,在运动方向的距离大于安全距离时,机器人的车身摆正,继续执行工作任务。如果左侧控制器给出的是一个低电平,此时机器人则再判断右侧是否存在障碍,无则右转。程序如图8所示。

图7 避障主程序图
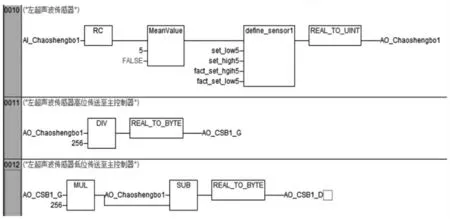
图8 超声波测控程序
当测得前方与障碍的距离在300~500 mm时,机器人保持原有的状态行驶。当距离小于300 mm时,此时消防机器人就会减速慢行;当小于100 mm时,机器人后退减速;控制器根据传输回来的信号控制液压马达的转速和转向,确定是向哪一侧转向。测距程序图如图9所示。
避开障碍后,延时5 s重新判断与障碍物之间的距离,当小于安全距离时,重复上述指令,直至完全避开障碍。程序的流程图如图10所示。

图9 测距程序图
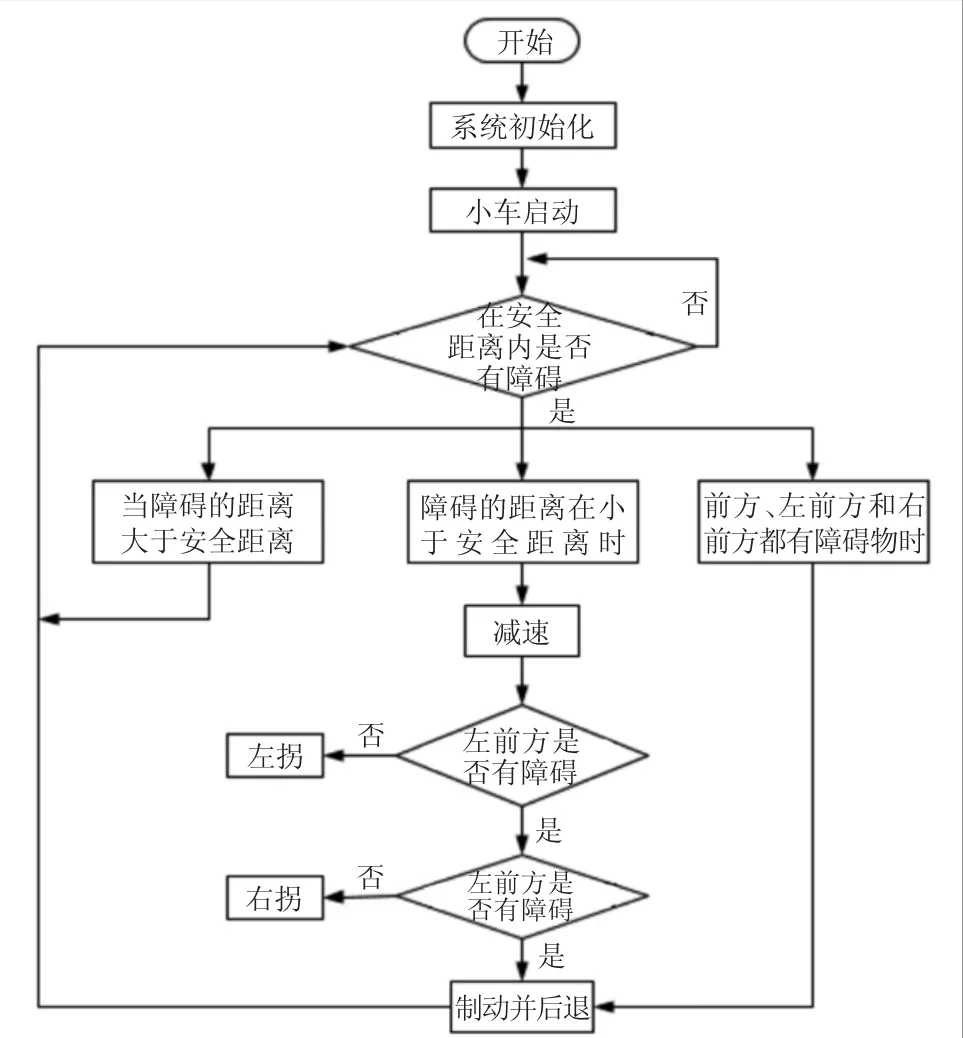
图10 主程序流程图
3 仿真搭建及结果分析
3.1 仿真系统的搭建
根据对消防机器人运动模型和避障模型的分析,控制器和传感器的选择,在Matlab软件控制平台搭建消防机器人。其避障系统仿真图如图11所示。
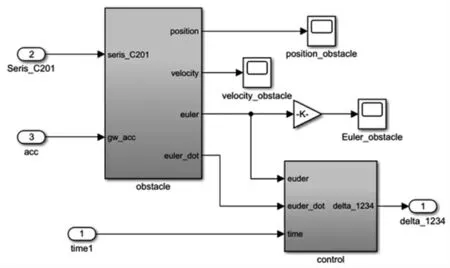
图11 避障系统仿真模型
3.2 结果分析
仿真设定的探测的范围为0~700 mm,表2给出了消防机器人连续10个时刻的位置、速度、角度值大小。机器人低速行走为0~40 mm/s,中速为40~80 mm/s,高速为80~120 mm/s。根据控制仿真结果,对10个数值时刻的输出速度和角度的改变量进行绘制,如图12和图13所示。从图表中可得,消防机器人的速度与障碍的距离成正比,距离越大则机器人的速度越高;偏转角度与障碍的距离成反比,距离越大则偏转的角度越小,当距离大于设定的安全距离时,机器人的偏转角度为0°,能够满足消防机器人在实际应用中的要求。
消防机器人所面临的火场环境是复杂未知的,为验证避障系统的运行情况,采取多种形状的障碍并随机放置模拟火灾环境,对消防机器人避障进行仿真实验。机器人最终的避障轨迹如图14所示。从图中可以得出,消防机器人的避障轨迹连续,平滑且稳定。
4 结 论
设计的基于PLC 和超声波传感器控制的涡轮排烟消防机器人避障系统,基于PLC为控制中心,以Codesys 为开发平台,采用多超声波传感器叠加的避障方式,在确保避障精确性同时,提高了消防机器人避障的实时性和实用性。
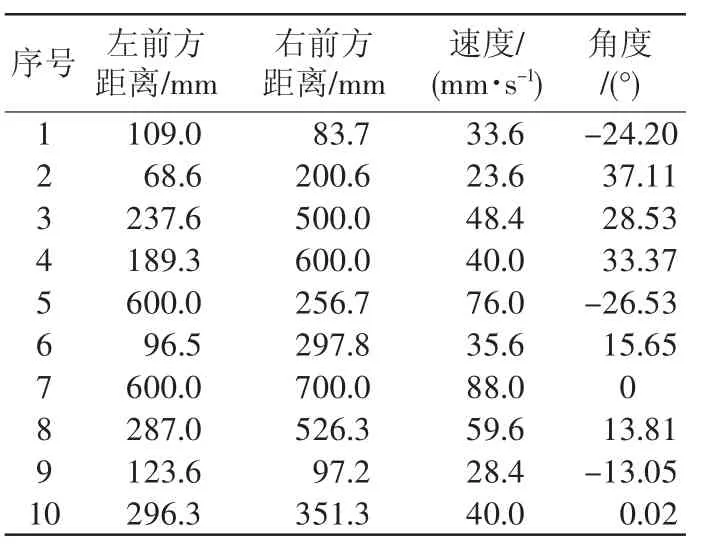
表2 传感器所测得数据及相应变量输出

图12 速度改变量图

图13 角度改变图

图14 仿真轨迹图