极限学习机在耙吸挖泥船产量预测中的应用
2020-05-08关放王蔚
关放,王蔚
极限学习机在耙吸挖泥船产量预测中的应用
关放1,王蔚2
(1.中港疏浚有限公司市场部,上海 200120;2.中港疏浚有限公司湛江分公司,上海 200120)
在耙吸式挖泥船的施工作业中,疏浚土的土质变化、水下作业环境变化会造成许多土的特性无法得到准确数值,对实际施工量的准确测量产生了巨大的阻力,且耙吸式挖泥船施工量的准确、有效性直接关系到一个企业的经济效益。针对以上实际问题,利用极限学习机算法以及极限学习机的一些改进算法,根据耙头运作的实际原理,为耙头构建新的预测模型,通过对模型的分析,为实际施工中模拟出产量预测模型分布。
极限学习机;耙吸式挖泥船;产量预测;黑箱模型
经过对以往的预测产量的模型,其中包括黑箱模型、遗传BP神经网络的分析,可以看出这两个模型在引入实际参数中后,通过验证研究与对比过后,所得出的数据皆不能达到生产中所需要的理想模型。
1 耙头疏浚机理分析与密度预测模型
1.1 耙头疏浚机理分析
耙吸式挖泥船的耙头是整个船舶的重要组成,耙头由特殊的的耙齿和耙臂组成,耙头在实际工作中,会将泥沙混合成泥水混合物,在通过耙头与耙臂连接的泥泵,把这些泥水混合物吸入船舱。
这个过程是十分复杂的,如果要直接观察这个过程,是难以直接建模的。现在还没有一个完整、完善的数字模型能精准描述这个过程中耙吸式挖泥船的产量。
根据实际经验分析,对于同一艘耙吸式挖泥船来说,耙头的工作状态以及泵入的泥水混合物是决定疏浚实际产量的重要因素。但实际情况会受到很多其他因素的影响,因此,作业数据中分析建模也有它的局限性,本章只分析相同疏浚工况下耙头的工作状态对耙头产量的影响。
1.2 密度预测模型
通过上述分析可知,耙头吸入泥水混合物是决定耙吸式挖泥船产量的重要因素,并依据此重要决定因素来构建预测模型。依据耙吸式挖泥船自带的传感器得到一些参数,例如吸入泥水混合物的流速、流量、航速等相关数据参数。基于这一点依照输入输出的原理,作为构建极限学习机的方法进行建模,将耙头控制与工作产量建立关系。其整体框图如图1所示。
2 极限学习机
什么是极限学习机,它是神经网络的一种,它与传统的 BP神经网络结构机理相同,如图2所示,但极限学习机有它的独特之处,有自己的训练方法。

图1 预测模型
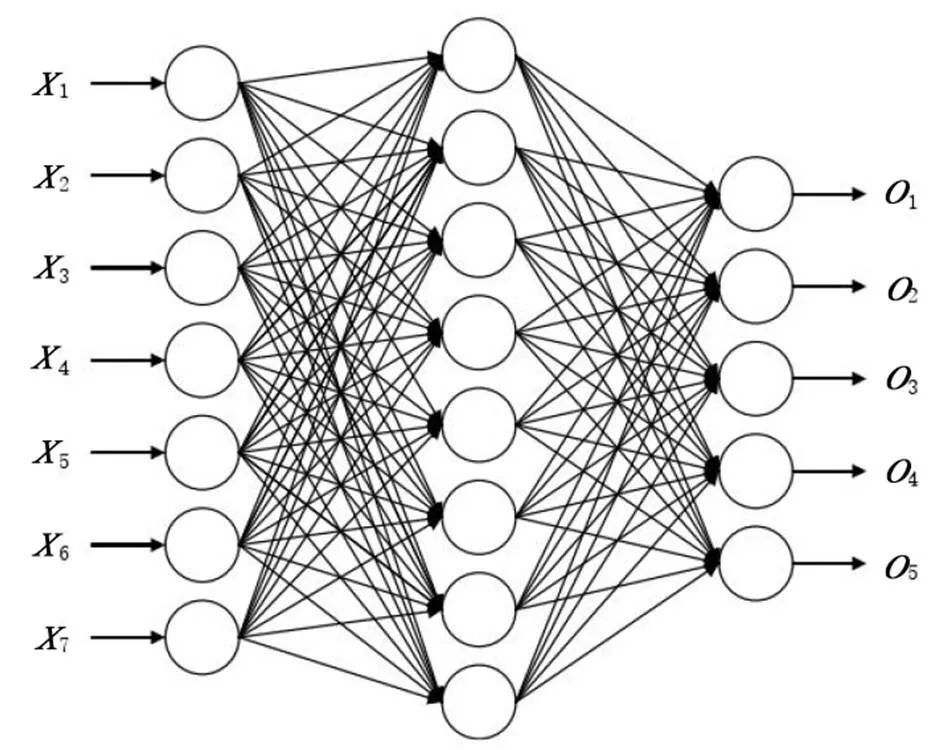
图2 神经网络结构
3 固定型极限学习机


在耙吸式挖泥船实际作业中会产生巨量的数据,应考虑对这些数据进行筛选学习,还是将所有数据统一作为样本进行学习,使得极限学习机在处理比较庞大的数据时,一般情况下隐层神经元的数量均少于数据数量,这种情况会导致为非方阵。

其中,+为的Moore-Penrose广义逆,一般可以通过正交法计算求得。
上述的极限学习机在设置隐层神经元个数后网络结构是无法改变的,所以又被称为固定型极限学习机(ELM)。固定型极限学习机的学习步骤便可以概括为:
式(2)中:2为隐藏节点层到输出向量的权重矩阵;为激活函数;1为输入向量到隐藏节点层的权重矩阵。
用随机产生的高斯噪声给矩阵1的每个元素赋值;用最小二乘法估计使期望输出与实际输出误差最小的输出权重矩阵2,数学上能够证明计算隐藏节点层输出矩阵的广义逆即2=(1)T。
3.1 极限学习机网络增量型
上述的极限学习机是固定的,对于网络的结构要求比较简单,神经元的数量是决定学习训练的唯一参数,在实际生产中由于样本数量比较庞大,而且数据样本的差异性较大,极限学习机在学习工程中需要反复纠错,造成自我学习效率低下。在实际操作过程中往往需要人工反复调试,而且不能找到有效的隐层神经元的具体数量,无效的隐层神经元会导致预测的准确度大大降低,其实际效果较差。为了解决这一问题,在固定型极限学习机的基础上加以改进,并提出了增量型极限学习机(I-ELM)这一类型。
增量型极限学习机的核心思想是通过逐个增加隐层神经元得到输出,每增加一个神经元,已存在的输出权值不会因此改变,只需要计算新增神经元与输出层间的连接权重即可完成训练,具体的网络产生的迭代公式为:
L()=L-1()+LL(3)
式(3)中:L()为隐层神经元递增到个时的网络输出;L为第个隐层神经元的输出矩阵;L为连接第个隐层神经元与输出层神经元的权值。
重复上述③④⑤,直至<或当前隐层神经元个数达到最大值后停止学习。如果一直比较大,这是由于输入权值和阈值的随机性造成的,此时网络参数不当,应重新开始学习。
3.2 结构风险最小化极限学习机
4 小结
本文以通过耙头泥水混合物密度耙吸式挖泥船在实际产量影响为切入点,考虑耙头的角度、船舶航速、水流流速以及挖掘深度等相关影响因素构建模型。此模型可以通过重新学习的方式,让操作员通过此模型预测不同情况下耙吸船的实际产量,基于此模型可以提前配置施工力量,合理规划施工流程,改善施工工艺,在不同情况下找到施工中核心的控制要点,有效提高产能。
[1]邢家丽.基于粒子滤波的自航耙吸挖泥船溢流损失估计与控制[D].镇江:江苏科技大学,2012.
[2]王健,钟志生,丁树友.特大型耙吸挖泥船研制及工程应用[J].水运工程,2017(8):28-30.
[3]张燕.国内外大型耙吸挖泥船的关键技术发展研究分析[D].哈尔滨:哈尔滨工程大学,2010.
[4]苏贞.自航耙吸挖泥船挖掘工况系统优化研究[D].镇江:江苏科技大学,2011.
[5]梁剑平.现代耙吸式挖泥船性能优化设计研究[J].中国水运,2017(10):35-36.
[6]Braaksma J. Model-based control of hopper dredgers[D].Delft:Delft University of Technology,2008.
[7]ROYAL IHC. Dredge smart,dredge efficient[J]. Dredging and Port Construction,2013(3):38.
[8]OSNABRUGGE J.Optimizing manpower and reducing fuel consumption while maintaining maximum dredging production[C]// Proceedings of WODCON XX World Dredging Conference,2013.
[9]陈虹.模型预测控制[M].北京:科学出版社,2013.
U616
A
10.15913/j.cnki.kjycx.2020.08.022
2095-6835(2020)08-0058-02
关放(1987—),男,本科学历,助理工程师,中港疏浚有限公司市场部高级主管,主要从事投标、合同报价、施工预算等工作。王蔚(1986—),男,本科学历,工程师,中港疏浚有限公司湛江分公司总经理,主要从事经营管理、造价管理、设备管理等工作。
〔编辑:张思楠〕