基于模糊Elman网络算法的移动机器人路径规划分析
2020-04-22荣蓉
荣蓉
摘 要:为了调正移动机器人避障线路,建立了基于模糊Elman网络算法的移动机器人路径规划模型,并应用进行Matlab仿真分析。利用现有障碍物的距离信息来实现机器人步长的实施可控制与调节,防止移动机器人在做出准确避障行为之后因为没有设定合适的步长而导致撞上障碍物,以0.5作为机器人的最初运动步长。仿真结果表明,采用模糊Elman网络可以获得比其它两种方法更优的路径规划效果,同时对障碍物进行高效避让,由此实现最优的路径规划。采用模糊Elman网络来构建得到的路径规划算法能够满足规划任务的要求,同时还能够根据机器人处于不同工作空间中的情况进行灵活调整。
关键词:模糊Elman网络算法; 移动机器人; 路径规划; 避障
中图分类号: TM715
文献标志码: A
Abstract:In order to raise the obstacle avoidance line, a path planning model of mobile robot based on fuzzy Elman network algorithm was established, and Matlab simulation analysis was carried out. In this study, distance information of existing obstacles was used to realize controllable and adjustable robot step length, so as to prevent the mobile robot from colliding with obstacles due to not setting appropriate step length after making accurate obstacle avoidance behavior. 0.5 is taken as the initial movement step length of the robot. Simulation results show that the fuzzy Elman network can achieve better path planning effect than the other two methods, and at the same time, avoid obstacles efficiently, so as to achieve the optimal path planning. The path planning algorithm constructed by fuzzy Elman network can meet the requirements of planning tasks, and can be flexibly adjusted according to different working spaces of robots.
Key words:Fuzzy Elman network algorithm; Mobile robots; Path planning; Obstacle avoidance
0 引言
为了使移动机器人顺利完成运动路径控制,需要采用路径规划技术来保证机器人顺利规避运动阶段遇到的各类障碍物,并迅速找到最优替代路径[1-5]。为充分提高路径规划过程的灵活性并快速适应不同路径状况,选择模糊Elman网络理论作为分析架构,构建得到路径规划算法,同时具备Elman网络以及模糊控制的共同优点,表现出了优异的信息并行处理以及泛化分析性能,可以将其用于处理一些不确定信息,同时还可以把专家的经验也转变成以网络形式进行输入与输出的映射,上述映射关系可通过模糊Elman网络来精确表达,从而为移动机器人提供更优的路径规划方案[6-8]。
相关方面的研究吸引了很多的研究学者。文献[9]利用神经网络来实现无人飞行器的航迹规划过程,同时选择帝国竞争算法来训练该网络,同時对比了该算法和人工蜂群算法之间的各自优势与差异性。文献等[10]同时设置了动态与静态两种障碍物再对机器人进行自主移动测试,通过Q学习和神经网络算法相结合的方式实施路径规划。文献[11]则在生物激励神经网络中加入了障碍物传感器以及运动状态分析模块以实现更优的控制效果,同时利用这一网络对船舶除锈机器人实施路径规划。文献[12]采用DHPSO和工神经网络相结合的方式来构建得到规划算法模型,在该模型中障碍物信息通过多层前向网络来表示。本文在前人研究的基础上,为了调高移动机器人避障线路,本位建立基于模糊Elman网络算法的移动机器人路径规划模型,并展开Matlab仿真分析。
1 模糊Elman网络算法
1.1 网络输入输出及模糊化
进入未知工作环境中后,移动机器人需对自身所处的周边环境进行数据收集后再实施路径规划,决策过程需要以获得的环境信息作为参考依据[13-14]。本文先假定能够得到机器人与正前方障碍物之间的距离F,以及位于机器人左右45°角范围内的障碍物距离,设定最远测试距离等于3 m,并且机器人可以得到目标点产生的方位数据tg,其中,tg是目标点和机器人所在部位连线与X轴之间形成的夹角,测试角度是-180°~+180°。
为采用标准化方法来设计模糊Elman网络的路径规划算法,应采用论域变换方法处理各精确输入量,再对距离参数[L,F,R]以及目标方位tg进行变换使其处于标准论域[-1/+1]内。以[a/b]来表示输入论域范围。
考虑到采用模糊Elman网络并不能对精确输入的数据直接处理,这就要求采用论域变换得到输入量再对其实施模糊化操作,再将其表示为模糊语言的形式。以{Near、Far}表示障碍物距离[L、F、R]对应的模糊子集,包括近(Near)与远(Far)两种模糊语言;以{RB、RS、ZO、LS、LB}来表示tg模糊子集,总共包含以下几种模糊语言:右小、右大、零、左小、左大。从图3-1中可以看到距离量L、F、R对应的隶属度函数。
1.2 网络控制规则设计
模糊Elman网络根据专家经验来设计控制规则,同时也能够体现网络输入量和输出量的变化关系。当机器人在运动期间探测到与周围障碍物不断接近的情况下,应适当改变机器人的运动方向,避免机器人撞到障碍物。机器人实现避障功能的具体原理为:如果当前障碍物和机器人相距很近时,应根据障碍物分布状态以及目标信息进行响应;如果现有障碍物和机器人之间的距离比较远,可以按照目标方位信息来完成响应,并使机器人往目标点方向继续移动。
因为障碍物可以和机器人之间形成8种分布状态,各状态对应的目标点可以形成5种方位信息,因此可以为机器人路径规划构建40条控制规则。
1.3 网络结构设计
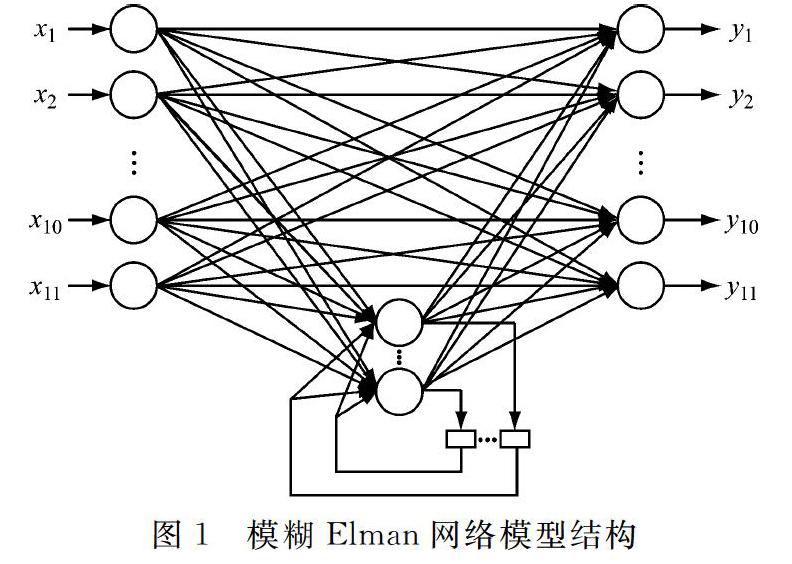
通过避障模糊控制规则训练模糊Elman网络,以训练得到的网络作为规则存储器,通过并行计算来提高模糊运算性能,把机器人从外部环境中采集得到的数据信息传输到模糊Elman网络内,再对计算得到的解进行模糊处理来实现避障的功能,由此完成对移动机器人的路径规划控制。从图1中可以看到本文选择的模糊Elman网络,此模型以x1~x2输入神经元构成障碍物距离L包含的所有模糊子集,同时以x3~x4作为障碍物距离F对应的模糊子集,以x5~x6作为障碍物形成距离R情况下包含的模糊子集,以x7~x11构成目标方位tg包含的所有模糊子集,以y1~y11构成机器人的转角sa对应的模糊子集,由此得到模糊Elman网络中总共包含了11个输入神经元,同时形成了11个输出神经元,通过多次测试后确定隐含层神经元的数量等于25。
对模糊Elman网络进行训练的过程中,应选择数值样本来描述输入输出模糊子集。考虑到在模糊Elman网络内各输出神经元分别对应于输出变量空间的特定量化值,因此可选择隶属函数来表达输出模糊子集。
2 结果分析
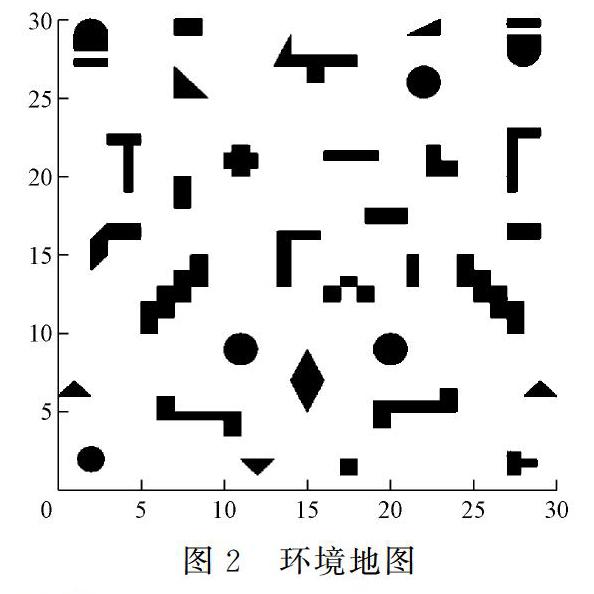
本研究采用Matlab软件来验证采用模糊Elman网络完成路径规划算法时是否具备可行性条件。把机器人作为一个移动质点,构建得到静态环境地图,如图2所示。
可以看到存在许多黑色障碍物,以S(3.5,7.5)作为路径规划起点,并以E(24.5,24.5)作为目标位置。对图2进行分析可以发现,输出变量sa总共被分成11个论域,将其表示为[-1/+1],此时c1/c2/…ct依次对应于-1/-0.8/…/1。
根据以上分析可知,各种情况下的避障模糊控制规则都可以采用输入与输出数值来表示,由此获得模糊Elman神经网络包含的所有训练样本,同时针对40条控制规则依次生成了40组网络训练样本。
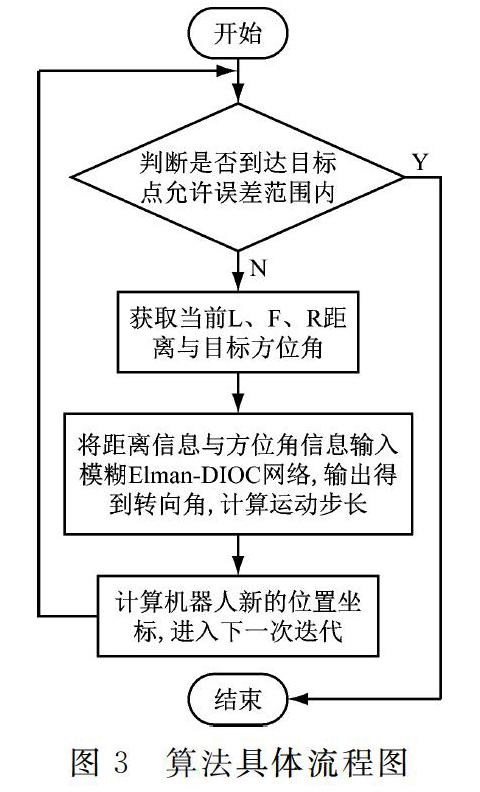
以11-25-11结构构建模糊Elman网络的拓扑系统,同时把目标误差设定在0.001,采用Logsig函数构建得到模糊Elman网络隐含层包含的所有激励函数f,同时以Purelin函数构建输出层激励函数g,再以梯度下降法来训练模糊Elman网络,同时将训练次数的最大值设定在3 000。确保该网络产生的输出变量sa能够和移动机器人形成良好匹配的运动步长,由此得到迭代期间机器人每次通过直线移动形成的距离,利用现有障碍物的距离信息来实现机器人步长的实施可控制与调节,防止移动机器人在做出准确避障行为之后因为没有设定合适的步长而导致撞上障碍物的结果,以0.5作为机器人的最初运动步长。采用模糊Elman网络来完成路径规划的具体算法,如图3所示。
在测试算法性能的过程中,综合运用人工势场以及Elman神经网络来完成路径规划,同时将得到的结果和模糊Elman网络规划实施了对比。因为使用模糊Elman网络分析方法时只根据现有环境信息实施规划,并且采用该网络进行训练的每次权值间都存在一定的差异性,为消除测试误差的影响,需要采用同样的环境地图开展10次规划,得到表1所示的结果,可以看到,采用人工势场法进行规划时得到了同样大小的路径长度。
根据表1可以发现,与Elman神经网络模型相比,采用模糊Elman网络路径规划方法可以获得更高的成功概率,并
使最优路径长度减小4.2%,同时平均路径长度能够减小7.8%;与人工势场法相比,采用模糊Elman网络以及规划得到的成功次数都是10次,并使最优路径长度减小幅度达到13.1%,同时减小了11.8的平均路径长度。通过仿真测试发现,采用模糊Elman网络可以获得比其它两种方法更优的路径规划效果,同时对障碍物进行高效避让,由此实现最优的路径规划。
当移动机器人进行运动时,还会遇到一些临时出现的障碍物导致机器人的运动过程受到阻碍,图4给出了对上述情况进行仿真得到的结果。通过测试发现,在移动机器人运动至(8.74,11.77)位置时,在(9.6,12.6)部位产生了新的障碍物,本算法可以根据周边环境信息变化特征,利用模糊Elman网络来完成分析过程,通过对输出结果进行模糊处理来完成对障碍物的避障目的,可以看到,当機器人到达靠近(9.9,11.49)的区域时可以灵活躲避新障碍物的影响,并继续朝目标点前进。通过上述仿真测试可以发现,采用模糊Elman网络来构建得到的路径规划算法能够满足规划任务的要求,同时还能够根据机器人处于不同工作空间中的情况进行灵活调整。
3 总结
1) 本研究采用Matlab软件来验证采用模糊Elman网络完成路径规划算法时是否具备可行性条件,利用现有障碍物的距离信息来实现机器人步长的实施可控制与调节,防止移动机器人在做出准确避障行为之后因为没有设定合适的步长而导致撞上障碍物的结果,以0.5作为机器人的最初运动步长。
2) 采用模糊Elman网络可以获得比其它两种方法更优的路径规划效果,同时对障碍物进行高效避让,由此实现最优的路径规划。采用模糊Elman网络来构建得到的路径规划算法能够满足规划任务的要求,同时还能够根据机器人处于不同工作空间中的情况进行灵活调整。
参考文献
[1] 周文卷. 复杂环境下自主移动机器人路径规划方法的研究[D]. 长春:吉林大学, 2014.
[2] Qu Y, Zhang Y, Zhang Y. A Global Path Planning Algorithm for Fixed-wing UAVs[J]. Journal of Intelligent & Robotic Systems, 2018, 91(3-4): 691-707.
[3] Yuan M, Wang S, Canyang W U, et al. APF-guided adaptive immune network algorithm for robot path planning[J]. Frontiers of Computer Science, 2009, 3(2): 247-255.
[4] 韩颜,许燕,周建平.粒子群-蚁群融合算法的机器人路径规划[J].组合机床与自动化加工技术,2020,36(2):47-50.
[5] 范世鹏, 祁琪, 路坤锋,等. 基于改进人工势场法的巡航导弹自主避障技术[J]. 北京理工大学学报, 2018, 38(8):62-68.
[6] 高巍, 赵海, 罗桂兰,等. 一种AAPF 算法及其在多机器人路径规划中的应用[J]. 东北大学学报(自然科学版), 2009, 30(5):644-647.
[7] 任恒乐,徐方,邸霈,田大吉.基于深度相机的移动机器人自主跟随技术[J].计算机工程与设计,2020,41(2):562-566.
[8] Bakdi A, Abdelfetah H, Boutamai H, et al. Optimal path planning and execution for mobile robots using genetic algorithm and adaptive fuzzy-logic control[J]. Robotics and Autonomous Systems, 2017, 89(1): 95–109.
[9] Pandey A, Parhi D R. Optimum path planning of mobile robot in unknown static and dynamic environments using Fuzzy-Wind Driven Optimization algorithm[J]. Defence Technology, 2017, 13(1): 47-58.
[10] Pooya M, Sohrab K, Sehraneh G. A fuzzy multi-stage path-planning method for a robot in a dynamic environment with unknown moving obstacles[J]. Robotica, 2015, 33(9):17.
[11] 张嘉琦. 基于移动子目标的复合式路径规划算法[J]. 中国公路学报, 2017, 30(11):138-146.
[12] 王耀南, 潘琪, 陈彦杰. 改进型生物激励神经网络的路径规划方法[J]. 控制工程, 2018.
[13] Song B, Wang Z, Zou L. On Global Smooth Path Planning for Mobile Robots using a Novel Multimodal Delayed PSO Algorithm[J]. Cognitive Computation, 2017, 9(1): 5-17.
[14] 卜新蘋, 苏虎, 邹伟,等. 基于复杂环境非均匀建模的蚁群路径规划[J]. 机器人, 2016, 38(3):276-284.
(收稿日期: 2019.09.09)
