基于多目标规划的无人机路径规划
2020-04-20赵梵喆林跃杨永琪
赵梵喆 林跃 杨永琪


摘要:本文以2017年波多黎各飓风为背景,基于多目标规划对投放物资的无人机进行路径规划,充分利用GIS的数据以及引入dev准则,合理地优化无人机调度问题。
Abstract: This paper takes the 2017 puerto rico hurricane as the background, based on multi-objective planning, carries on the path planning to the unmanned aerial vehicle that puts in the material, makes full use of the GIS data and introduces the dev criterion, and reasonably optimizes the uav scheduling problem.
关键词:多目标规划;GIS;dev准则
Key words: multi-objective planning;GIS;dev criterion
中图分类号:V279+.2 文献标识码:A 文章编号:1006-4311(2020)09-0208-03
1 问题重述
随着社会的发展和经济的进步,无人机的发展逐步趋于成熟。无人机的应用有不同的場景和方式,例如,应用于军事勘探和追踪,农药的无人喷洒,民用影像航拍等。以2017年发生飓风的波多黎各为例,利用最合理的方法向该地投放物资。
2 问题分析
由于位置和无人机路径规划的不确定性,基于机会理论引入了不确定的随机变量,然后提出了不确定的随机多目标规划问题。介绍了不确定随机变量的排序关系,利用变量之间的排序关系将不确定的随机多目标规划问题转化为不确定的随机单目标规划问题。[3]方差准则将不确定的随机单目标规划问题转换为确定性的单目标规划问题,利用改进的基于GIS的多准则决策模型对区域空间布局进行优化。首先,GIS具有强大的功能,如空间数据管理,数据处理,模型建立和操作,空间表达等。[1]尤其是它可以将医院布局的影响因素与复杂的空间关联性进行整合。其次,多准则决策分析模型可以考虑影响位置优化的主要因素,并以多准则的形式表达位置因素。
3 模型假设
确定了新医院布局的标准。
①距居民区的距离;②居住区人口密度;③与现有医院的距离和现有医院的规模;④距主要道路的距离;⑤设施必须位于城市规划用地上。
4 模型建立与求解
无人机任务分配模型主要考虑三个决策目标,即时间,路径和有效载荷。可以将其设置为不确定空间(τ,L,M)中的不确定变量,并记录为ε1,ε2。总之,给出了具体的无人机任务分配模型。
当时间目标函数以50km/h的速度飞行时,它会受到路径和负载的极大影响。当以60km/h的速度飞行时,它会受到路径的极大影响。
决策者对无人机任务中的每个目标功能有不同的偏好,并因此赋予不同的权重。因此,可以建立不确定的随机单目标规划模型。
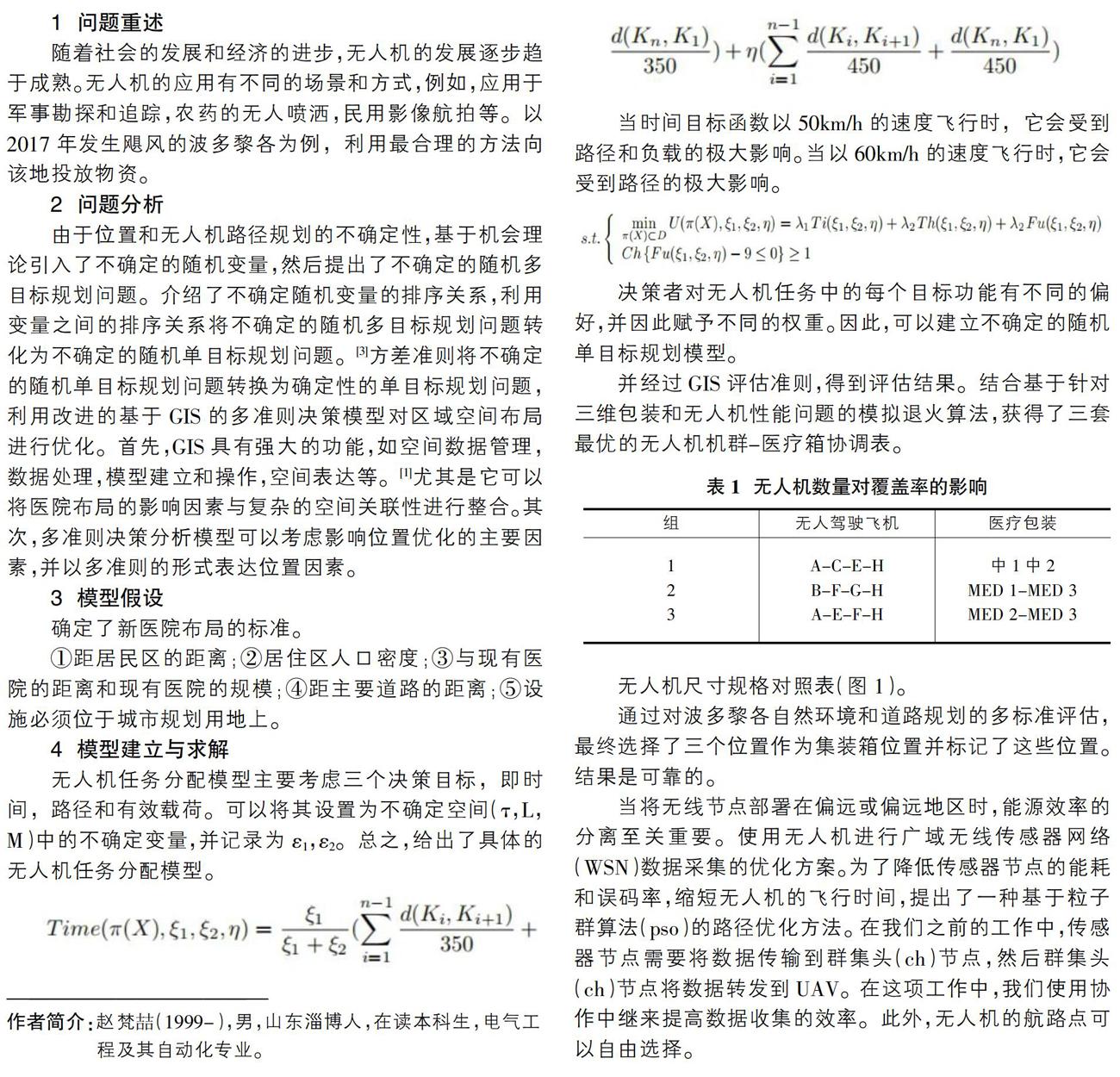
并经过GIS评估准则,得到评估结果。结合基于针对三维包装和无人机性能问题的模拟退火算法,获得了三套最优的无人机机群-医疗箱协调表。
无人机尺寸规格对照表(图1)。
通过对波多黎各自然环境和道路规划的多标准评估,最终选择了三个位置作为集装箱位置并标记了这些位置。结果是可靠的。
当将无线节点部署在偏远或偏远地区时,能源效率的分离至关重要。使用无人机进行广域无线传感器网络(WSN)数据采集的优化方案。为了降低传感器节点的能耗和误码率,缩短无人机的飞行时间,提出了一种基于粒子群算法(pso)的路径优化方法。在我们之前的工作中,传感器节点需要将数据传输到群集头(ch)节点,然后群集头(ch)节点将数据转发到UAV。在这项工作中,我们使用协作中继来提高数据收集的效率。此外,无人机的航路点可以自由选择。
数值结果表明,两条路线之间的性能差距随着路线点数量的增加而增大,这有利于新策略的实施。另外,根据传感器网络的区域和传感器节点的密度,描述了无人机的最佳路由点。这些贡献最大程度地延长了网络寿命和通信质量,同时最大限度地减少了无人机飞行时间。(表2)
通过无人机有效载荷和医院位置的路径规划,经过计算得出调度表表3。
经过以上分析,得出基于GIS地图的无人机飞行计划的主要投放点。(图2)
5 模型评价与改进
充分利用GIS强大的数据管理,分析和可视化显示功能,并通过引入Pev准则,将不确定的随机单目标规划问题转化为原始问题的有效解决方案。但是 该模型是基于许多假设的理想情况,实际情况要复杂得多。同时随着实例大小的增加,将生成更多的搜索树,并且可能需要更多的计算时间。改模型需要进行改进有两处, 考虑广泛的影响因素,尤其是经济和文化因素。智能优化算法模型用于更精确地研究布局优化的位置,以及 扩大研究范围并验证模型的泛化。
6 总结
紧急和救灾中的无人机调度优化和路线优化问题被转换为多行销业务员问题。对要巡逻的区域进行路线规划。通过利用最低点上方最宽搜索区域的特征并结合网格划分,将覆盖巡逻表面更改为有效巡逻点,从而使路线的遮挡率更小。将无人机的巡逻问题转化为经典的VRP问题来解决。通过引入PEV准则, 将不确定的随机单目标规划问题转化为确定的单目标规划问题,并证明所获得的最优解是有效的解决方案。[2]在对GIS进行空间分析和多准则决策模型的基础上,将选址的影响因素分解为决策准则,并推广到GIS中。通过GIS工具的缓冲分析和覆盖分析,实现了模型的空间表达。从位置优化的适用性的角度出发, 形成了适合布局优化的区域分层分布图,可以为决策者提供参考。
参考文献:
[1]孙贇,王瑛,李超.基于P_(EV)准则的不确定随机多目标规划问题求解[J].南京航空航天大学学报,2018,50(05):645-652.
[2]孟祥飞,王瑛,亓尧,吕茂隆,李超.基于P_(EV)准则的I-UMOP问题求解方法[J].系统工程与电子技术,2018,40(02):338-345.
[3]左华.模糊多目标规划解的研究[D].华北电力大学,2013.
作者简介:赵梵喆(1999-),男,山东淄博人,在读本科生,电气工程及其自动化专业。