一种基于单目视觉的测高测距新方法
2020-04-20李孟华唐茂唐子淇高健
李孟华 唐茂 唐子淇 高健

摘 要:利用单目摄像头成像原理,提出一种两步测高测距的方法。分别建立两个测点处被测物与其成像之间的几何关系,根据两个测点间距摄像头参数以及显示屏像素参数,同时得到被测物高度计算公式和被测物与测点距离计算公式。将摄像头与被测物体的位置归纳为:摄像头主光轴穿过被测物和摄像头主光轴不穿过被测物,本文给出的计算公式完全适用于以上两种情况。通过实验对测量精度进行验证,并对误差进行了分析,提出了误差来源与相应的解决思路。结果表明本测量方法精确度高,适应性好。
关键词:单目摄像头;两步法;测高;测距
1 引言
单目视觉系统结构简单,通过一个摄像头即可获取目标图像深度等信息。同时还具有运算速度快、摄像机标定简单的优点。基于单目视觉系统开发的测距仪器在在汽车防撞[1-5]、机器人自动避障[6,7]等领域应用广泛。
目前已有大量基于单目测量的方法用来测量高度或者测距。文献[1-5]原理类似,都是通过被测物移动引起图像大小的变化和光学几合原理距离来计算镜头与物体的距离,但是边缘检测过程易受物体的规则和光照的影响;文献[8]利用经典的单目测距法,即成像几何光学得到被测物高度,但是事先需要标定;文献[9]通过在匹配点中随机选取一些特征点,使用PNP算法计算目标距离,但需要进行大量的运算。文献[10]提出一种结合射影几何知识的自动化标定方法,完成目标物的高度测量;文献[11]首先用阈值分割法和快速连通区域标记算法初步计算身高,最后根据摄像机成像模型进行计算,但需要进行大量的运算,对场景中的几何要求也较高。
本文基于单目测距模型和單目摄像头成像原理得出了测量被测物高度和测点到被测物距离的测量方法和计算模型:分别建立两个测点处被测物与其成像之间的几何关系,根据两个测点间距摄像头参数以及显示屏像素参数,同时得到被测物高度计算公式和被测物与测点距离计算公式。将摄像头与被测物体的位置归纳为:摄像头主光轴穿过被测物和摄像头主光轴不穿过被测物,本文给出的计算公式完全适用于以上两种情况。
2 测高原理及公式推导
2.1 测高原理分析
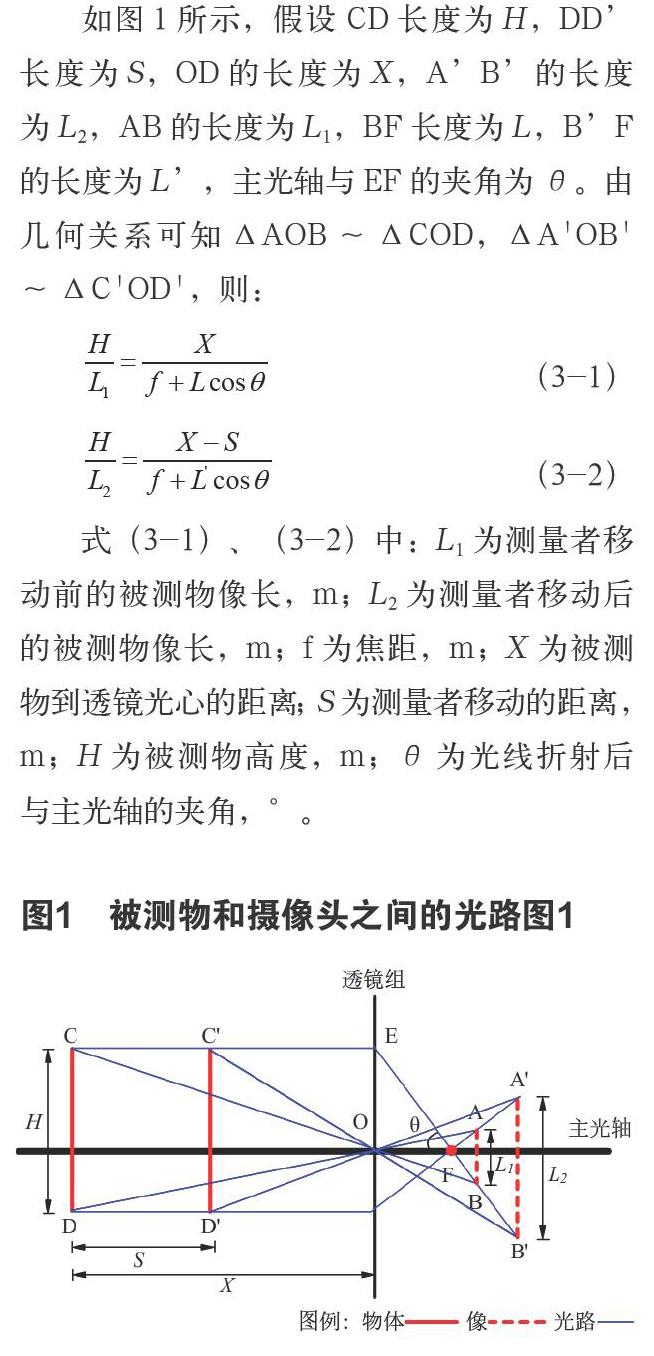
本系统利用组合透镜成像规律对被测物的高度进行测量。测量者在离被测物一定距离的地方,利用摄像头获得被测物像长,测量者前进一段距离后,再次利用摄像头获得被测物像长,根据两次像长、被测物高度以及测量者前进距离之间的光学几何关系,即可求得被测物的高度。
2.2 测高公式推导
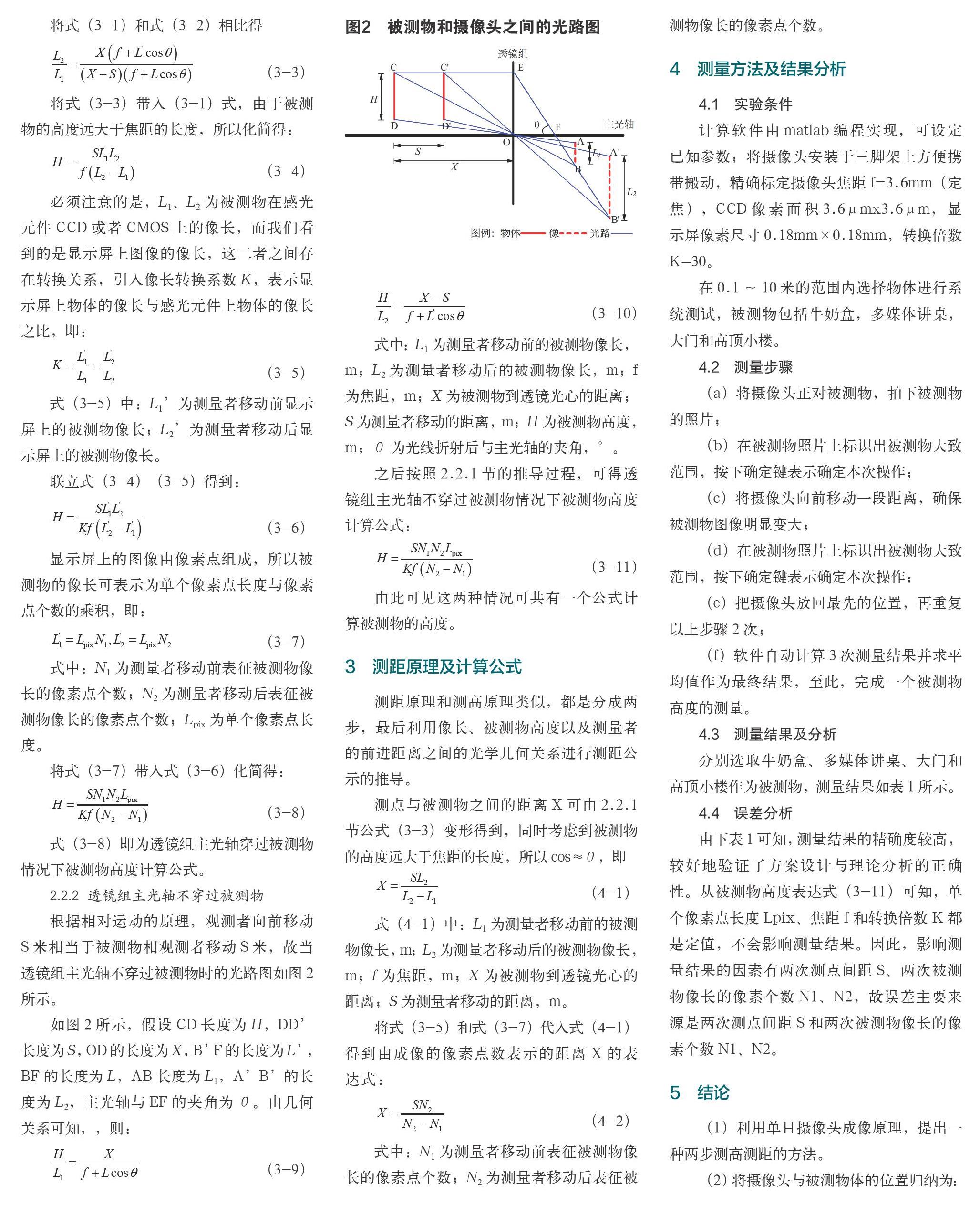
摄像头镜头就相当于一个凸透镜,根据凸透镜成像规律我们可以画出被测物和被测物的像之间的光路图。由于测点与被测物体的位置关系具有多样性,总结各种位置关系,最终将这些位置关系归纳为2种类型,即透镜组主光轴穿过被测物和透镜组主光轴不穿过被测物,接下来就分别对这2种类型进行被测物高度的计算研究。
4 测量方法及结果分析
4.1 实验条件
计算软件由matlab编程实现,可设定已知参数;将摄像头安装于三脚架上方便携带搬动,精确标定摄像头焦距f=3.6mm(定焦),CCD像素面积3.6μmx3.6μm,显示屏像素尺寸0.18mm×0.18mm,转换倍数K=30。
在0.1~10米的范围内选择物体进行系统测试,被测物包括牛奶盒,多媒体讲桌,大门和高顶小楼。
4.2 测量步骤
(a)将摄像头正对被测物,拍下被测物的照片;
(b)在被测物照片上标识出被测物大致范围,按下确定键表示确定本次操作;
(c)将摄像头向前移动一段距离,确保被测物图像明显变大;
(d)在被测物照片上标识出被测物大致范围,按下确定键表示确定本次操作;
(e)把摄像头放回最先的位置,再重复以上步骤2次;
(f)软件自动计算3次测量结果并求平均值作为最终结果,至此,完成一个被测物高度的测量。
4.3 测量结果及分析
分别选取牛奶盒、多媒体讲桌、大门和高顶小楼作为被测物,测量结果如表1所示。
4.4 误差分析
由下表1可知,测量结果的精确度较高,较好地验证了方案设计与理论分析的正确性。从被测物高度表达式(3-11)可知,单个像素点长度Lpix、焦距f和转换倍数K都是定值,不会影响测量结果。因此,影响测量结果的因素有两次测点间距S、两次被测物像长的像素个数N1、N2,故误差主要来源是两次测点间距S和两次被测物像长的像素个数N1、N2。
5 结论
(1)利用单目摄像头成像原理,提出一种两步测高测距的方法。
(2)将摄像头与被测物体的位置归纳为:摄像头主光轴穿过被测物和摄像头主光轴不穿过被测物,本文给出的计算公式完全适用于以上两种情况。
(3)通过实验对测量精度进行验证,实验结果证实了本测高测测距方法的有效性。
(4)由误差分析得出被测物像长是误差最主要的来源,因此,如何更加准确得到被测物像长应成为今后进一步研究的重点。
基金项目:机床动态共性技术的研究及数控系统专用操作程序的设计(2015ZX04005004-3)。
参考文献:
[1] 王连桂,杜俊贤.基于单目视觉的车辆测距系统研究[J].电子世界,2014(19):16-16.
[2] 吴骏,李文杰,耿磊,肖志涛,张芳,李月龙.基于单目视觉的前方车辆检测与测距[J].计算机工程,2017,(第2期).
[3] 于国防,刘岩,谭相录,付丽娜,寇立强. 基于单目视觉的倒车障碍物测距技术的研究[J].计算机应用与软件,2012,29(4):197-199.
[4] 陈勇,陈瑶.基于单目视觉的前方车辆距离计算方法研究[J]. 机电工程,2014,31(11):1499-1504.
[5] 余厚云,张为公.基于单目视觉的跟驰车辆车距测量方法[J].东南大学学报(自然科学版)(3):154-158.
[6] 于乃功,黄灿,林佳. 基于单目视觉的机器人目标定位测距方法研究[J]. 计算机测量与控制(10):60-62+66.
[7] 肖大伟.基于单目视觉的轮式移动机器人目标测距及跟踪研究[D].东南大学, 2016.
[8] 屈姗姗,陈潇,吴晓红,等.基于单目视觉测距的测高测面积方法[J].科学技术与工程, 2016,16(2):224-228.
[9] 汪亚兵,冯肖维,肖健梅,等.基于单目视觉的实时目标距离测量[J].工业控制计算机,v.31(1):113-115.
[10] 钱鹰,张梦.基于单目视觉的目标物高度测量[J].计算机工程与设计,2016,37(3):709-713.
[11]甘志杰,刘云.基于单目视觉的实时身高测量算法[J].青岛科技大学学报(自然科学版),2008,29(4):366-369.
[12]李峰,周雷,苗刚中. 基于单目视觉的目标测距方法[C]// 华东六省一市自动化学会学术年会. 2012.
[13]陈强,朱立新,夏德深.结合Canny算子的图像二值化[J].计算机辅助设计与图形学学报,2005,17(6):1302-1306.
[14]李了了,邓善熙,丁兴号.基于大津法的图像分块二值化算法[J].微计算机信息, 2005(14):76-77.
