基于AT89S52的汽车倒车防撞报警器的设计
2016-05-18李旺杨佩白景涛
李旺++杨佩++白景涛
摘要:该文设计的汽车倒车防撞报警器利用单片机计算来控制设备的测距功能和报警功能, 从而使汽车驾驶员在倒车过程中能够清楚地知道车后障碍物与汽车尾部的距离,并及时发出报警信号,避免倒车事故的发生。该汽车倒车防撞报警器具有良好的实用价值和广泛的应用前景。
关键词:防撞;测距;单片机
中图分类号:TP311 文献标识码:A 文章编号:1009-3044(2016)09-0258-02
1 引言
今时今日,国内汽车的使用量正在飞速增长,汽车不但早已不再是“稀罕物”,而且马路上的汽车越来越“拥挤”,甚至城市繁华地段的停车位往往也“一位难求”。在汽车行驶过程中,驾驶员常常需要通过倒车操作来实现车辆的转向、入库等动作。由于驾驶员在车内控制汽车倒车时,视野会受到汽车驾驶室其他结构部分的限制,且车后高度较低的物体也无法通过后视镜看到,另外,在能见度较低的天气和夜晚,车后方的物体更是难以被驾驶员清楚地看到,因此,如果没有辅助驾驶员倒车的设备或手段,则难以保证安全驾驶的顺利实现。考虑到倒车操作的上述困难,应提供一种可以在任何能见度的条件下提示驾驶员车后方物体与汽车尾部安全距离的倒车防撞设备。基于上述要求,再顾及设备的经济性和实用性,本文设计了一款以单片机和超声波测距传感器为核心部件的汽车倒车防撞报警器。
2 超声波传感器测距原理
因为超声波具有较强的指向性,且其在传播过程中能量消散缓慢、能在介质中传播较远的距离,故超声波适合用于测量物体间的距离。另外,因为超声波测距具有使用安全、成本低廉、测定迅速、易于实现、计算简单、抗干扰性能强、稳定性能好、便于实时控制和测量精度高等优点,因此该测距方式在汽车倒车防撞报警器中得到了广泛的应用。
采用超声波测距时,先由超声波发生器向指定方向发射超声波,并在发射时刻开始计时。当超声波沿发射方向遇到障碍物后,就会产生反射,而在发射端接收到反射回的超声波后,计时结束。假设超声波由发射到返回经过的时间为t,则根据超声波在空气中的传播速度340m/s,就可以计算出发射端和障碍物之间的距离s。该测距关系式可写为:
[s=340?t/2]
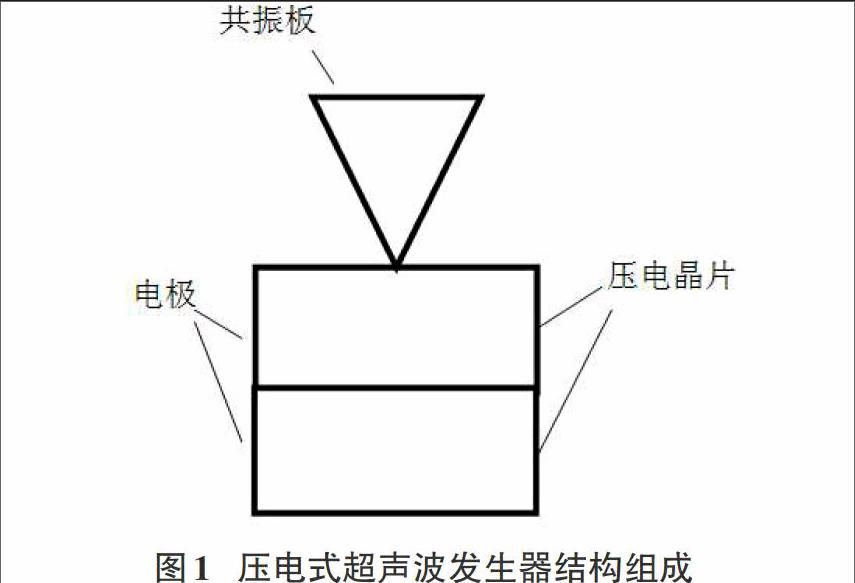
用于产生超声波的超声波发生器大体可以分为两大类:一类用电气方式产生超声波,另一类用机械方式产生超声波。目前得到广泛应用的是机械方式类型中的压电式超声波发生器。
压电式超声波发生器是通过利用压电晶体的谐振来工作的。该类超声波发生器的内部结构如图1所示,它由两个压电晶片和一个共振板组成。在它的两个电极加电脉冲信号,当电极频率与压电晶片的固有振荡频率相等时,压电晶片将会产生共振,并引发共振板产生振动,进而产生超声波。反过来,如果两电极未加电,当共振板作为接收器接收到超声波时,其将引发压电晶片产生振动,如果将该机械振动转化为电信号,则该装置就又变为超声波接收器了。
目前超声波测距的量程一般能达到百米以上,测量精度可达到厘米以上。由这一测距量程和精度可知,利用超声波测距法来设计制作汽车倒车防撞报警器是完全合适的。
3 硬件电路设计
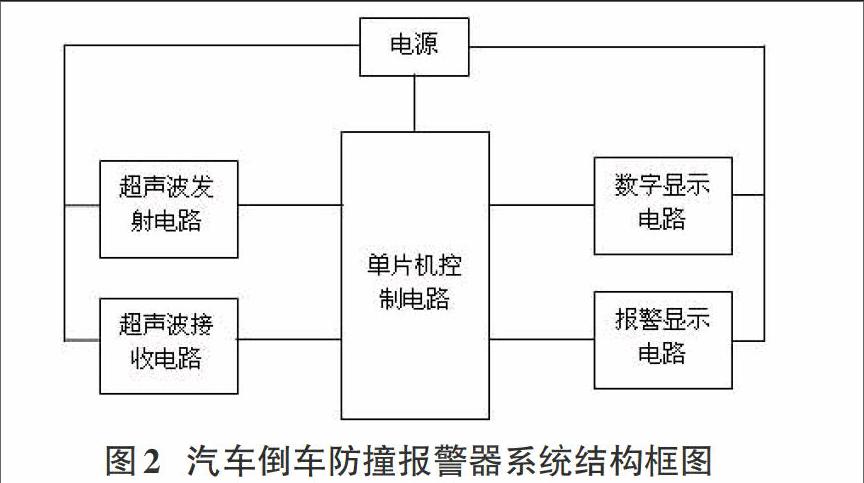
本文设计的汽车倒车防撞报警器是在单片机的计算和控制下, 利用超声波测距原理,测量和显示汽车尾部与车后障碍物之间的距离,并在该距离超过安全距离时能够发出声光报
警。这样一来,就可以及时警示汽车驾驶员采取刹车或减速等操作, 以避免汽车在倒车过程中发生碰撞。整个设备装置的硬件部分由主要由超声波发射电路、超声波接收电路、电源、单片机控制电路、数字显示电路和报警电路等组成,其系统整体框图如图2所示。
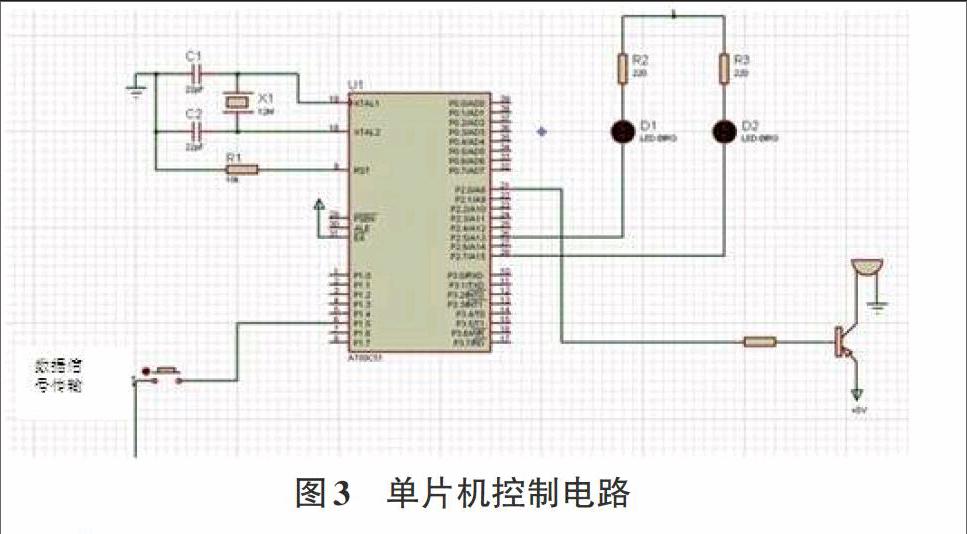
上述硬件电路中的核心部分为单片机控制电路,这部分电路主要用于距离的计算和报警的控制。本设计选用价格便宜、性能稳定的AT89S52单片机作为控制电路中使用的单片机。
AT89S52单片机的特点包括:8k字节可编程Flash存储器,256字节RAM,32位输入输出I/O 口线,看门狗定时器,2个数据指针,3个16位定时器/计数器,1个6向量2级中断结构,全双工串行口和片内晶振及时钟电路。该类型的单片机因为拥有8位CPU处理器和8k大小可编程Flash,故其性能足够用于本文设计的汽车倒车防撞报警器控制系统。
由于超声波发射电路、超声波接收电路、电源电路较为常见,因此本文只重点说明单片机控制电路的设计方法。
当倒车防撞报警器开始启用时,先由单片机控制超声波发生器向车尾方向发射超声波,当发射出的超声波遇到车辆后方的障碍物时, 其反射的回波又被超声波接收器接收。根据超声波由发出到返回的时间,单片机可计算出超声波发生器与障碍物之间的距离,进而将该距离与安全距离进行比较,当得到的结果小于安全距离时,单片机控制报警电路发出声光警报。这一单片机控制电路的具体电路形式如图3所示。
4 软件设计
在控制程序设计方面需要说明的是,由于超声波发生器和超声波接收器通常被一同安装在狭小的设备空间内,因此两者之间易产生较强的回波干扰,因此为了防止该干扰引发测距误差,在单片机控制程序中采用了超声波延迟接收的手段,从而防止回波干扰对报警器的影响,提高测距计算的准确性。
单片机控制程序流程图如图4所示。该流程图中,当给报警器上电后,初始程序将控制超声波发生器发射超声波,并同时由单片机内部的计时器开始计时,在超声波接收器收到反射回的回波后,计时停止。接下来由测距程序计算与障碍物间的距离,并将计算结果由数字显示控制程序写到液晶显示器上。最后判断计算得到的距离是否小于安全距离,如果小于安全距离则启动声光报警器进行报警。
5 结语
本文设计的汽车倒车防撞报警器利用单片机计算来控制设备的测距功能和报警功能, 从而使汽车驾驶员在倒车过程中能够清楚地知道车后障碍物与汽车尾部的距离,并及时发出报警信号,避免倒车事故的发生。该汽车倒车防撞报警器具有良好的实用价值和广泛的应用前景。
