基于正交试验六韧带手性结构展收几何参数优化
2020-04-17刘国勇侯永涛叶雪松贺国徽朱冬梅
刘国勇 侯永涛 叶雪松 贺国徽 朱冬梅

摘 要:针对目前手性结构采用的传统材料并不具备大变形后自恢复的能力,提出一种在面内具备展收特性的金属材料用于六韧带手性结构. 利用有限元分析了节环间距、节环直径、节环高度以及韧带厚度等4个因素对六韧带手性结构收拢和展开后的最大应力的影响. 以展开后的最大应力为指标,通过正交试验,分析得到了各个因素的影响程度由主到次依次为节环间距、韧带厚度、节环高度和节环直径,并通过极差分析和方差分析选出了一组最优参数,即节环间距70 mm、韧带厚度0.06 mm、节环高度8 mm、节环直径22 mm,并且通过试验验证了仿真模型的可靠性及本手性结构具备大变形后自恢复的能力.
关键词:可展收;六韧带;手性;大变形;正交试验
中图分类号:TB31;TB125 文献标志码:A
Abstract:In view of the fact that the traditional materials used in the present chiral structures do not possess the ability of self-recovery after large deformation, a metallic material with in-plane unfolding and folding capability was proposed for the chiral structures of six ligaments. The influences of four factors,including the node spacing,the node diameter,the node height and the ligament thickness,on the maximum stress of the hexagonal ligament chiral structure after folding and unfolding were analyzed by finite element method. Taking the maximum stress after unfolding as the index,the effect of each factor was analyzed by orthogonal experiment. The order of influence is the node spacing,the ligament thickness,the node height and the node diameter. As a result,a set of optimal parameters can be obtained by range analysis and variance analysis,namely,the node height 8 mm,the node spacing 70 mm,the ligament thickness 0.06 mm,and the node diameter 22 mm. Meanwhile,the reliability of the simulation model was verified and the chiral structure has the ability of self-recovery after large deformation by experiments.
Key words:deployable and folding;six ligaments;chirality;large deformation;orthogonal experiment
1989年Wojciechowski[1]提出了手性結构的概念. 六韧带手性蜂窝结构是一种负泊松比结构,近年来因具有良好的力学性能而受到广泛的关注[2]. Prall
等[3]提出了六韧带手性蜂窝结构,证明了该蜂窝结构的泊松比为-1. Alderson等[4]对三韧带同向、三韧带反向、四韧带同向、四韧带反向、六韧带手性蜂窝结构在面内准静态压缩下的力学行为进行了试验研究. Bettini等[5]提出了一种六韧带手性蜂窝结构的加工方法,并且用碳纤维材料加工了具有7个节点(为了与ABAQUS中的网格节点区分,本文以节环代替六韧带手性蜂窝结构中的节点表述)的六韧带手性蜂窝结构,用有限元方法及试验对其受载变形进行研究. Airoldi等[6]介绍了用碳纤维材料加工多个节环的六韧带手性蜂窝结构,并对其力学性能进行研究. Airoldi等[7]研究一种新型六韧带手性蜂窝结构,并用有限元方法及试验对其力学性能进行研究. Zhong
等[8]采用椭圆积分理论分析了四边形蜂窝结构在大变形下的非线性力学响应,并通过数值模拟验证了结果. Mousanezhad 等[9]基于能量的方法系统地研究了蜂窝结构的面内弹性响应特性. 赵显伟[10]用数值模拟方法研究了四韧带同向手性蜂窝结构的几何参数对力学性能的影响. Ruan等[11]对六边形蜂窝结构在两种方向分别进行了面内冲击的研究. Hu等[12-14]研究了六边形蜂窝结构分别在低速冲击压缩和高速冲击压缩时的力学行为,推导出高速冲击和低速冲击之间的临界速度公式,并通过试验和理论分析研究了由ABS聚合物制成的三韧带反向蜂窝结构的准静态力学性能. 卢子兴等[15]研究了具有手性和反手性构型的负泊松比蜂窝在不同冲击速度下的变形模式和能量吸收等动态力学响应特性. 张新春等[16]利用数值模拟方法研究了六韧带手性蜂窝结构的面内冲击动力学特性. 张政等[17]分析了六韧带手性蜂窝结构在受到面内冲击时的力学性能. 目前研究其内容主要集中于小变形时的静力学性能、冲击动力学以及屈服方面,并且所研究的六韧带手性蜂窝结构材料主要是复合材料、尼龙塑料等,对材料的大变形六韧带手性蜂窝结构研究较少. 目前的传统材料并不具备大变形后自动恢复的能力,大变形展收与小变形的力学行为有较大的不同,对可展收手性结构在大变形时的各种力学性能的研究还十分缺乏.
与传统的手性蜂窝结构不同,本文所讨论的手性蜂窝结构其制作材料是金属,该种手性结构可用焊接的方法加工得到[18],具有重量轻的特点,韧带厚度仅有约0.1 mm,且不容易发生脆断,易加工、变形量大、可展收、且不存在压溃现象. 本文主要讨论了材料为金属的六韧带手性蜂窝结构在大变形情况下,不同节环间距、节环高度、节环直径以及韧带厚度的面内展收性能,得到不同结构参数对该六韧带手性蜂窝结构的力学行为的影响规律以及展收时的最优参数,用来指导该种结构在可变形飞行器方面的应用.
1 模型建立
1.1 六韧带手性结构的几何参数
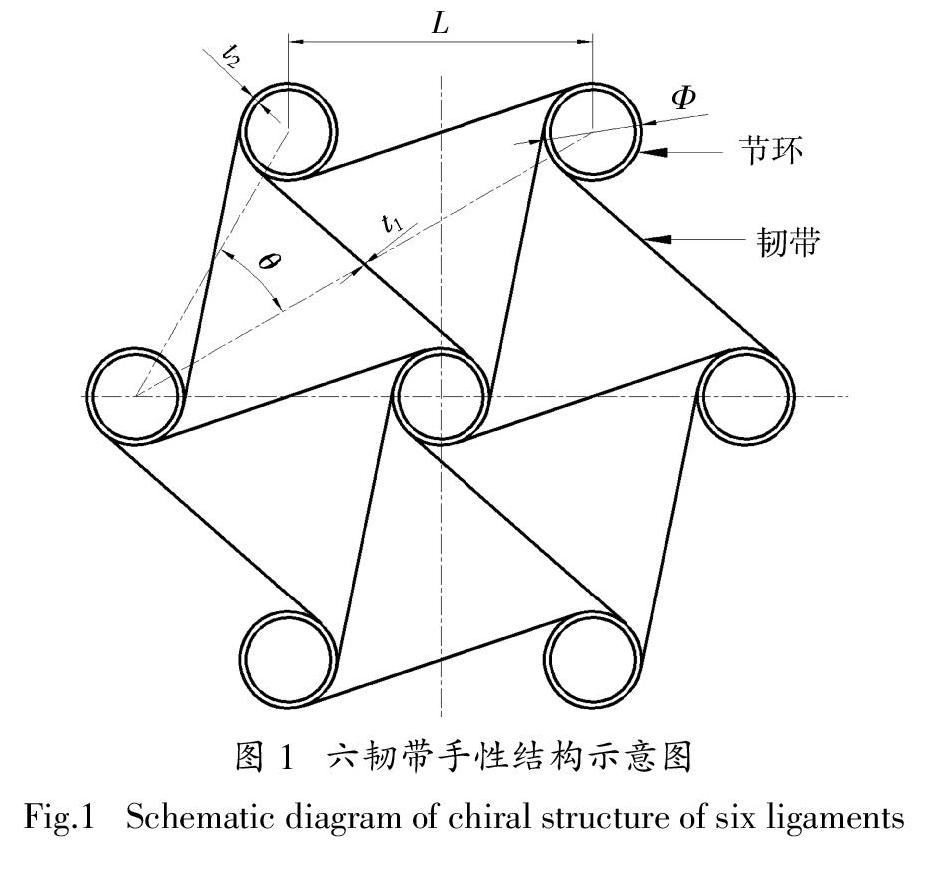
图1为六韧带手性结构示意图,六韧带手性结构由节环和连接相邻节环的韧带组成. L为相邻两节环间距,Ф为节环直径(外径),t1为韧带厚度,t2为节环厚度,θ为相邻节环连线与相对节环连线的夹角,节环高度用H表示.
1.2 有限元模型
采用有限元软件ABAQUS对六韧带手性结构大变形力学特性进行分析. 节环与韧带的材料分别选用Q235和65Mn,假定节环材料为理想弹塑性材料,材料参数如表1所示.
首先使用三维壳单元建立节环以及韧带模型,然后将节环和相连的韧带绑定;单元类型选择S4R(四结点曲面薄壳,减缩积分,沙漏控制,有限膜应变);单元库选择Explicit;几何阶次选择线性;族选项选择壳;单元形状选择四边形;算法选用进阶算法. 由于在韧带与节环之间以及韧带与韧带之间在展收过程中存在接触行为,因而采用通用接触,切向行为设置为无摩擦,法向行为设置为硬接触.
收拢前后模型如图2所示. 分别选择7个节环的中心来创建参考点RP1~RP7,将创建的参考点与对应节环的内表面进行耦合,然后在所建参考点处施加对应的边界条件及载荷,使周围六个节环同时均匀地沿图3中虚线运动,并使每个节环以图3所示的转动方向在x-y平面内绕自身的轴线转动;限制RP7在x、y、z方向位移以及绕x、y转动的自由度,使其绕着z轴旋转,以此达到展收的效果.
1.3 网格无关性证明
为确定网格敏感性对计算结果的影响,分别划分4种不同的网格方案,以收拢后的最大应力为参考,通过数值计算选取计算结果较为稳定的网格尺寸,计算结果如表2所示. 在网格尺寸为1 mm时,最大应力仿真结果与最小尺寸仿真结果偏差在0.5%以内,所以本文取网格尺寸为1 mm进行仿真计算.
2 有限元模型验证
2.1 展收试验
在本文仿真分析中,假定韧带为弹塑性材料,收拢后能够完全展开并恢复到收拢前的状态. 现制作六韧带手性结构以及收拢工装、收拢工具(图4),进行六韧带手性结构的展收试验,来证明本文选取的金属材料制成的手性结构具备大变形后自动恢复原来状态的功能.
在进行试验前首先按照图5所示测量六韧带手性结构的长宽尺寸,然后利用图4中工具将其收拢到图6所示状态,保持一周后将其释放,再次测量长宽并记录. 换成另一六韧带手性结构,将上述过程重复3次. 记录及仿真结果见表3.
由表3分析可知,试验中试件与理论尺寸有所不同,这是由加工误差和测量误差引起的. 由金属制作的六韧带手性结构收拢后将其释放,能够自动恢复到原来的状态,具备自恢复能力.
展开后的试验件的残余应力测试可以采用盲孔法或X射线法,为保证样件完好,可选用X射线应力测定仪(X-350A)进行残余应力测试. 将图7圆圈中两条线的十字交叉点对准仿真结果显示的最大应力位置,然后调整电压和电流大小对发射枪进行预热,最后设置各项参数即可进行测试,其中测量方法选择倾侧固定ψ法,定峰方法选择交相关法.
2.2 拉伸试验
为了验证仿真模型的可靠性,对六韧带手性结构进行加工,并且进行单节环拉伸试验,和仿真试验结果进行对比. 试验采用精度等级为0.5,加载精度0.1 N的微机控制电子万能机进行加载,试验机与装有SANS系统的电脑连接,进行力-位移检测,应变片(BX120-1AA)的粘贴位置如图8所示,宽度方向在韧带中心,图中的编号1、2、3分别对应应变测试系统中的AI1-1、AI1-2、AI1-3,试验时利用试验机以10 mm/min的速度进行加载,直到载荷达到5 N,让其保持5 min后再进行卸载,观察载荷为5 N时的应变. 试验状态以及韧带应变分别如图9和图10所示.
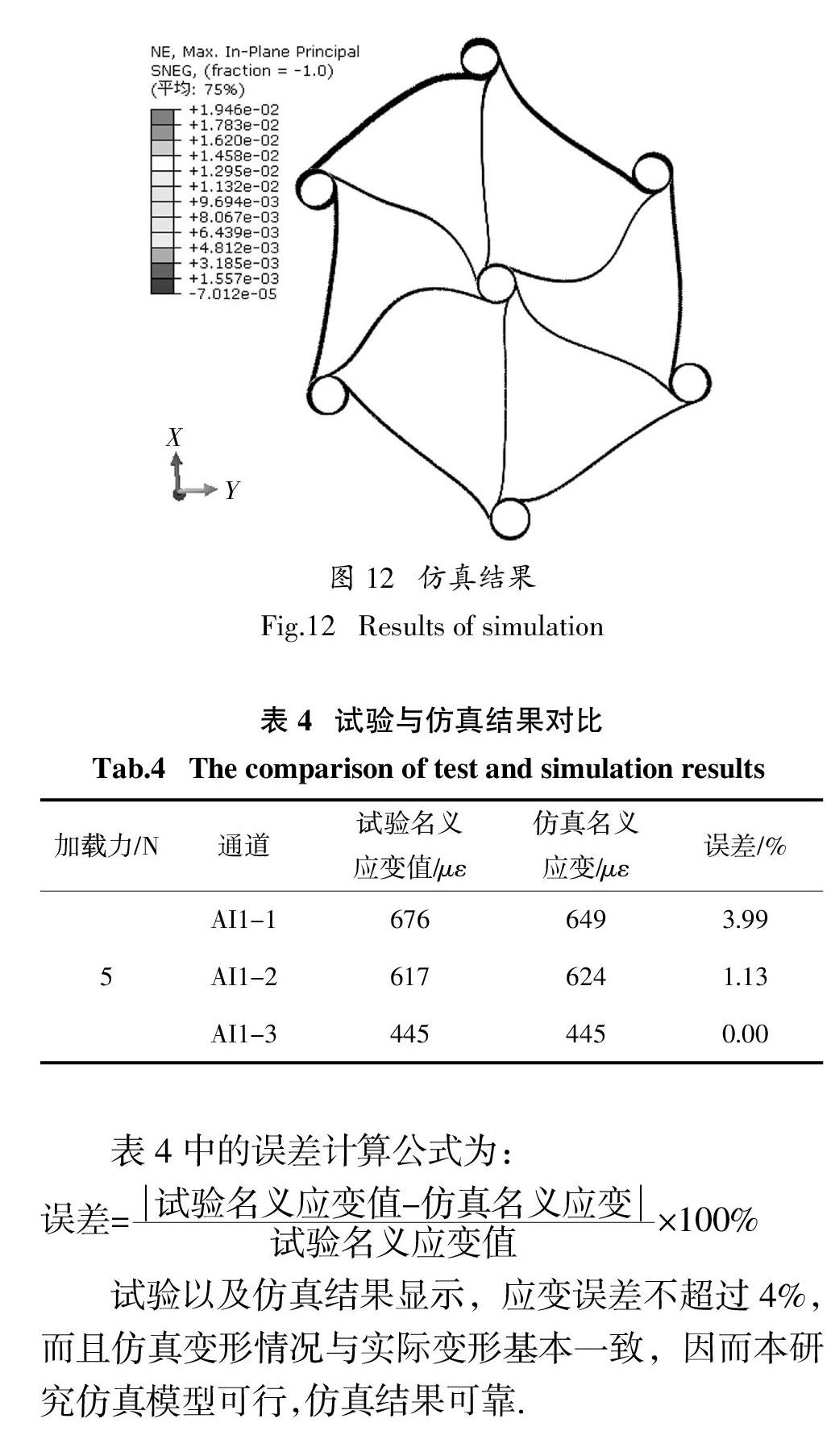
利用ABAQUS对上述试验过程进行仿真模拟,试验中得到该六韧带手性结构的位移-载荷曲线如图11所示,可以发现位移与载荷接近线性关系,当载荷为5 N时,位移为8 mm,因而在仿真时,同样以10 mm/min的速度进行加载,直到位移为8 mm,然后观察变形情况,如图12所示,并对编号1、2、3处单元的名义应变进行测量,与试验进行对比,结果见表4.
试验以及仿真结果显示,应变误差不超过4%,而且仿真变形情况与实际变形基本一致,因而本研究仿真模型可行,仿真结果可靠.
3 结构参数对最大应力影响仿真分析
选取六韧带手性蜂窝结构节环高度12 mm、节环直径16 mm、节环间距50 mm以及韧带厚度0.1 mm作为无量纲基准,取无量纲节环高度为H=12,无量纲节环直径为Φ=16,无量纲节环间距为L=50,无量纲韧带厚度为t1=0.1,对不同参数下的构件进行仿真分析. 由于本文研究的是一种正六边形手性蜂窝结构,即θ=30°,故不考虑角度的影响.
对六韧带手性蜂窝结构进行收拢和展开过程的仿真分析,设置匀速收拢(沿图3虚线方向的速度为3.5 mm/s)到最终状态时,周围六个节环相对于中间节环的距离为25.2 mm,比较不同参数时收拢到最终状态的最大应力以及展开后的最大应力,收攏和展开时,最大应力较小的构件展收性能较好. 仿真计算发现,韧带长度和节环直径的比值较大时,将会达到屈服极限;韧带厚度较大时,展开后的应力会很大,故取节环间距L分别为50、60、70和80 mm;取节环直径Φ分别为16、18、20和22 mm;取韧带厚度t1分别为0.06、0.08、0.10和0.12 mm;节环高度H分别为8、10、12和14 mm.
由于蜂窝结构的相对密度是一个很重要的指标,定义六韧带单胞蜂窝结构的相对密度为总质量m与包络正六边形体积V的比值. 图13中Lr表示韧带长度,其表达式为:
由式(5)可知,影响相对密度的因素有节环直径Φ、节环厚度t2、韧带厚度t1和节环间距L,因为节环厚度较大,收拢和展开时变形很小,故可以通过调节节环厚度来保证相对密度一致. 在选取的各个无量纲参数为1时,取节环厚度为1.3 mm,此时相对密度为416.26 kg/m3. 保持相对密度不变,节环厚度随各参数的变化情况如图14所示.
由圖14可知,节环厚度在1~4 mm之间调节可以保证相对密度一致,而节环厚度t2为1 mm时,收拢及展开过程中变形很小,可以忽略,故不研究节环厚度对手性结构影响,也可以忽略相对密度对本文研究内容的影响,所以在以后的研究中,节环厚度取值为1 mm.
3.1 节环高度
保持无量纲节环间距、无量纲节环直径、无量纲韧带厚度均为1,观察无量纲节环高度变化时,构件收拢及展开后的最大应力变化曲线分别如图15和图16所示.
仿真结果显示,构件进行收拢后,节环高度大的构件最大应力小,无量纲节环高度为1.2时最大应力为794.90 MPa. 因为节环高度增大时,构件易收拢,使得产生的最大应力减小. 展开过程中,应力与载荷(接触面积)、应力释放有关. 当无量纲节环高度为1时,展开后构件的最大残余应力为最小值,其值为360.90 MPa;无量纲节环高度小于1时,构件展开后最大应力增加,这是因为此时韧带与节环接触面积减小,内应力容易释放,但相同载荷条件下应力会增加较多,这时载荷为主导,反应出来是节环高度减小,构件最大应力增加;无量纲节环高度大于1时,展开后构件最大应力增大,这是因为节环与韧带的接触面积增加,使得与节环接触的韧带在展开时不容易释放内部的应力,反应出来最大应力会增加.
3.2 节环直径
保持无量纲节环间距、无量纲节环高度、无量纲韧带厚度均为1,观察无量纲节环直径变化时,构件收拢以及展开后的最大应力变化曲线分别如图17和图18所示.
仿真结果显示,随着节环直径的增大,构件收拢以及展开后的最大应力都急剧减小,最小分别达到791.80 MPa与239.90 MPa,这是因为随着节环直径的增大,韧带卷曲的程度逐渐减小,导致应力也逐渐下降. 但是由于节环厚度是韧带厚度的5倍以上,节环直径太大会显著增加结构的重量,使得相对密度过大,故节环直径不宜太大.
3.3 节环间距
保持无量纲节环直径、无量纲节环高度、无量纲韧带厚度均为1,观察无量纲节环间距变化时,构件收拢以及展开后的最大应力变化曲线分别如图19和图20所示.
仿真结果显示,随着节环间距增大,构件收拢以及展开后的最大应力都明显减小,最小分别达到616.3 MPa与50 850 Pa,但是由于节环间距较大时会使得构件整体的刚度变小,当节环间距超过80 mm时不易收拢,所以节环间距不应超过80 mm.
3.4 韧带厚度
保持无量纲节环直径、无量纲节环高度、无量纲节环间距均为1,观察无量纲韧带厚度变化时,构件收拢以及展开后的最大应力变化曲线分别如图21和图22所示.
仿真结果显示,随着韧带厚度增大,构件收拢以及展开后的最大应力都增大,应力最小可分别达到683 MPa与27 670 Pa,但是韧带厚度过小会使得构件的整体刚度变小,影响整体的支撑性能,故韧带厚度不宜太小.
4 几何参数优化
为了在构件展收时,找到一组最优参数使得构件收展后的最大应力最小,进行了正交试验设计. 六韧带手性蜂窝结构的几何参数,即韧带厚度、节环直径、节环间距以及节环高度对该结构展收过程中的最大应力影响较大,故选取这些参数作为本次的试验因素. 由于无法确定哪两个因素有交互作用,若考虑交互作用,则正交试验表规模太大,所以暂时按照无交互作用进行正交试验设计. 正交试验中的研究因素和水平如表5所示.
由于本次正交试验是一个4因素4水平试验,故可选用4水平表进行正交试验设计,正交表为L16(45),具体数据见表6,其中E为误差列.
进行正交试验极差分析时,每一列的数值都是不相同的,即每种因素水平的变化对所选指标的影响是不相同的,每一列的极值越大,说明该因素对所选指标的影响程度越大.
由表7可知,4个因素中所求得的极差大小顺序依次为RC、RA、RD、RB,所以各影响因素从主到次的顺序依次为C(节环间距)、A(韧带厚度)、D(节环高度)、B(节环直径). 为确定这些参数对最大应力影响的显著性,进行方差分析,分析结果见表8.
表8中数据显示,C(节环间距)对最大应力的影响在90%的置信度上是显著的,A(韧带厚度)和D(节环高度)的显著性低于C,而B(节环直径)则是不显著的.
根据极差分析和方差分析的结果,确定出节环高度为8 mm,节环间距为70 mm,韧带厚度为0.06 mm,节环直径为22 mm为最优方案. 根据以上正交试验得到的最优方案进行数值模拟,所得六韧带手性蜂窝结构展收后的最大应力为321.6 Pa,仅为韧带屈服应力的4 × 10-7,由此可以认为此优化方案达到了优化目标,可以不考虑参数的交互作用. 最优方案数值计算云图如图23所示.
5 结 论
针对应用于手性蜂窝结构的传统材料不具备大变形后自动恢复的能力,提出将65Mn应用于韧带结构,通过有限元仿真以及试验验证了此金属材料确实具备大变形自恢复能力,且大变形恢复后残余变形很小. 为得到手性蜂窝结构的最优参数,采用正交试验得到结论如下:
1)单独考虑各个因素对韧带应力的影响规律
为:当构件进行收拢时,节环高度大的构件最大应力较小,展开后的最大应力随着节环高度的增加先减小后增大,无量纲节环高度为1时取得最小值;随着节环直径的增大,构件收拢以及展开后的最大应力都减小;随着节环间距增大,构件收拢以及展开后的最大应力都减小;随着韧带厚度增加,构件收拢以及展开后的最大应力都增大.
2)以六韧带手性结构收拢再展开后的最大应力为性能指标,其影响因素由主到次分别为节环间距、韧带厚度、节环高度、节环直径;最优方案为节环高度8 mm,节环间距70 mm,韧带厚度0.06 mm,节环直径22 mm,此方案展开后的最大应力仅为321.6 Pa.
参考文献
[1] WOJCIECHOWSKI K W. Two-dimensional isotropic system with a negative Poisson ratio[J]. Physics Letters A,1989,137(1/2):60—64.
[2] 徐时吟,黄修长,华宏星. 六韧带手性结构的能带特性[J]. 上海交通大学学报,2013,47(2):167—172.
XU S Y,HUANG X C,HUA H X. Study on the band structure of hexagonal chiral structures[J]. Journal of Shanghai Jiaotong University,2013,47 (2):167—172. (In Chinese)
[3] PRALL D,LAKES R S. Properties of a chiral honeycomb with a Poisson's ratio of -1[J]. International Journal of Mechanical Sciences,1997,39(3):305—314.
[4] ALDERSON A,ALDERSON K L,ATTARD D,et al. Elastic constants of 3-,4-and 6-connected chiral and anti-chiral honeycombs subject to uniaxial in-plane loading[J]. Composites Science and Technology,2010,70(7):1042—1048.
[5] BETTINI P,AIROLDI A,SALA G,et al. Composite chiral structures for morphing airfoils:Numerical analyses and development of a manufacturing process[J]. Composites Part B:Engineering,2010,41(2):133—147.
[6] AIROLDI A,BETTINI P,PANICHELLI P,et al. Chiral topologies for composite morphing structures-part I:Development of a chiral rib for deformable airfoils[J]. Physica Status Solidi (B),2015,252(7):1435—1445.
[7] AIROLDI A,BETTINI P,PANICHELLI P,et al. Chiral topologies for composite morphing structures-part II:Novel configurations and technological processes[J]. Physica Status Solidi (B),2015,252(7):1446—1454.
[8] ZHONG R C,FU M H,YIN Q Y,et al. Special characteristics of tetrachiral honeycombs under large deformation[J]. International Journal of Solids and Structures,2019,169:166—176.
[9] MOUSANEZHAD D,HAGHPANAH B,GHOSH R,et al. Elastic properties of chiral,anti-chiral,and hierarchical honeycombs:a simple energy-based approach[J]. Theoretical and Applied Mechanics Letters,2016,6(2):81—96.
[10] 趙显伟. 可变形蜂窝结构的力学性能分析[D]. 哈尔滨:哈尔滨工业大学航天学院,2013:34—46.
ZHAO X W. The analysis of mechanical properties of morphing honeycomb structures[D]. Harbin:School of Astronautics,Harbin Institute of Technology,2013:34—46. (In Chinese)
[11] RUAN D,LU G,WANG B,et al. In-plane dynamic crushing of honeycombs-a finite element study[J]. International Journal of Impact Engineering,2003,28(2):161—182.
[12] HU L L,YU T X. Dynamic crushing strength of hexagonal honeycombs[J]. International Journal of Impact Engineering,2010,37(5):467—474.
[13] HU L L,YU T X. Mechanical behavior of hexagonal honeycombs under low-velocity impact-theory and simulations[J]. International Journal of Solids and Structures,2013,50(20/21):3152—3165.
[14] HU L L,LUO Z R,ZHANG Z Y,et al. Mechanical property of re-entrant anti-trichiral honeycombs under large deformation[J]. Composites Part B:Engineering,2019,163:107—120.
[15] 卢子兴,李康. 手性和反手性蜂窝材料的面内冲击性能研究[J]. 振动与冲击,2017,36(21):16—22.
LU Z X,LI K. In-plane dynamic crushing of chiral and anti-chiral honeycombs[J]. Journal of Vibration and Shock,2017,36(21):16—22.(In Chinese)
[16] 张新春,祝晓燕,李娜. 六韧带手性蜂窝结构的动力学响应特性研究[J]. 振动与冲击,2016,35(8):1—7.
ZHANG X C,ZHU X Y,LI N. A study of the dynamic response characteristics of hexagonal chiral honeycombs[J]. Journal of Vibration and Shock ,2016,35(8):1—7.(In Chinese)
[17] 張政,苏继龙. 六韧带手性蜂窝材料韧带的冲击动荷系数及稳定性分析[J]. 复合材料学报,2019,36(5):1313—1318.
ZHANG Z,SU J L. Impact dynamic load coefficient and stability analysis of ligament of hexachiral honeycomb[J]. Acta Materiae Compositae Sinica,2019,36(5):1313—1318.(In Chinese)
[18] 刘国勇,杨广任,刘海平. 一种可展收手性蜂窝结构加工方法及加工装置:中国,CN105666077A[P]. 2016-06-15.
LIU G Y,YANG G R,LIU H P. Method and processing device for deployable chiral honeycomb structure:China,CN105666077A[P]. 2016-06-15. (In Chinese)
