基于无迹卡尔曼滤波的高墩垂直度偏差预控方法
2020-04-11马成时小兵张麒高凯
马成,时小兵,张麒,高凯
基于无迹卡尔曼滤波的高墩垂直度偏差预控方法
马成1,时小兵1,张麒2,高凯2
(1. 中国建筑第四工程局有限公司 珠海分公司,广东 珠海 519000;2. 重庆大学 土木工程学院,重庆 400045)
为了解决超高墩垂直度偏差预控缺乏理论基础的问题,提高超高墩垂直度的精度,推导初始缺陷、日照温差荷载和风荷载综合因素影响下的超高墩偏位公式,以此为理论基础与无迹卡尔曼滤波方法相结合,构建超高墩垂直度偏差预控状态方程,实现以墩高为基准的墩身立模值预测和修正,形成一种基于无迹卡尔曼滤波的超高墩垂直度预控方法,经过与传统控制方法比较分析,该方法使垂直度控制精度提高了4.5倍,且最大偏位值只有6 mm,远小于规范限值;并分析各参数对所提方法的影响,得到各参数的合理取值范围。通过本文的研究,建立超高墩垂直度偏差预控的理论技术,为保障超高墩垂直度提供了一条有效途径。
超高墩桥梁;垂直度控制;无迹卡尔曼滤波;偏位值预测

桥梁结构作为保障我国经济建设的重要基础设施,其施工质量关系着社会经济命脉和人民生命安全。在我国广袤的西部地区,地形险峻,山高谷深,超高墩桥梁成为跨越山水的必然选择,而随着桥墩高度的增大,受截面温差、风荷载以及初始缺陷等的影响,在施工过程中产生的垂直度偏差将更难控制。另一方面,在桥梁建成后的服役期间,混凝土的徐变、收缩等作用可能将施工中的偏差进一步放大,对上部结构的受力更加不利。因此,如何控制桥墩的垂直度偏差是高墩施工阶段的关键环节。铁怀民等[1]报道了某45 m高桥墩在施工中出现了高达55 mm的倾斜,通过有限元分析表明,桥墩垂直度偏差对桥墩线形影响较大,特别是垂直度施工偏差使得二阶效应更加明显,桥墩裂缝宽度和内力将成倍增加。宋嘉等[2]指出自重、不平衡弯矩、施工偏载以及风荷载等作用均会引起施工中桥墩垂直度偏差,且对高墩承载力的影响较为显著,并基于线弹性稳定理论,推导了高墩偏位的近似计算公式。杨霞[3]通过测试指出薄壁空心桥墩迎光侧与背光侧的温差较大,最高可达20°。唐峰等[4]针对日照辐射可引起山区高墩桥梁墩顶过大偏位的问题,推导非线性温度分布梯度对高墩垂直度的影响,并指出可采用预偏置法、定时测量校模法等,对施工中的墩身偏位进行控制。刘衡等[5−8]研究采用全站仪、应变等测试方式对施工中高墩垂直度进行量测的适用性,结果表明可通过测量及施工控制手段消除施工过程中桥墩的垂直度偏差。传统上桥墩垂直度的控制往往采用预偏置法,即根据桥墩上一节段施工中产生的偏差进行反向纠偏,这在墩高较小时有一定的实用性,但随着桥墩高度的增加,由于不平衡弯矩、初始缺陷、风荷载和日照辐射等综合因素对高墩垂直度的影响加剧,此时若不考虑这些因素的作用,仅通过简单的反向预偏将无法达到高墩垂直度控制的目标,例如文献[1]报道在桥墩垂直度纠偏过程中,桥墩反向偏差超过了20 mm。针对这一问题,本文考虑不平衡弯矩、初始缺陷、风荷载和日照辐射等综合因素对高墩垂直度的影响,通过理论推导给出高墩偏位的综合理论计算公式,然后引入无迹卡尔曼滤波技术提出高墩垂直度预控方法,可大幅提升桥墩垂直度控制的精度,为桥梁高墩及其他类似高耸结构的垂直度施工控制提供技术支撑。
1 综合因素作用下高墩偏位计算方法
在不平衡弯矩、初始缺陷、风荷载和日照辐射等作用下,高墩的受力和变形可简化为如图1所示的下端固支、上端悬臂的柱[2]。
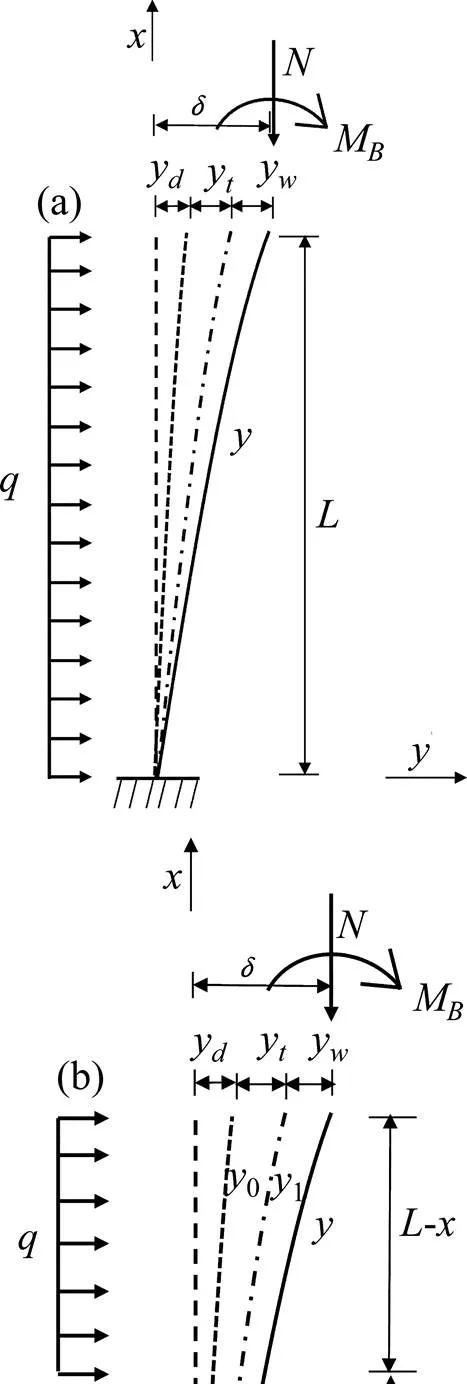
(a) 第k节段受力及变形图;(b) 隔离体受力图
在图1中,假设柱的自重全部作用在墩顶,以集中力表示;不平衡弯矩M表示施工荷载不均匀引起的偏载作用,风荷载假设为均布荷载,而由各种因素在墩顶引起的侧向偏位为。引入墩顶初始位移Δ作为高墩的初始几何缺陷,将满足几何边界条件的桥墩初始位移函数假设为:

其中:为桥墩当前高度;是选取截面距墩底的距离。
在线性日照温差分布作用下,桥墩的温度变形可由梁的纯弯曲理论公式求得:

其中:是顺桥向桥墩的截面宽度;为截面最大温差;是桥梁材料的线膨胀系数。对式(2)进行积分求解,并根据边界条件(0)=0,(0)=0可得到仅在线性日照温差荷载作用下桥墩的偏位公式为:
根据力学原理分析可知日照温差荷载对于自由变形的结构物而言只会产生相应的变形而不会产生力[10],故将日照温差荷载产生的偏位作为一种初始缺陷加入到假设的桥墩初始位移函数0中得:
取距墩底距离为截面以上的部分为隔离体,如图1(b)所示。在隔离体中,对截面求力矩平衡∑M=0,建立微分方程:

其中:和分别为墩体材料的弹性模量和截面惯性矩,是考虑综合因素影响后的位移函数。将式(4)代入式(5),可解出墩顶的偏位为:

其中墩顶初始偏位取5 mm,风荷载根据桥墩标高10 m处的实测风速并进行概率统计意义上的换算求解出基本计算风速,将此风速值代入文献[19]中式5.4.1计算出静阵风等效风荷载并在全墩高上进行均匀分配,施工不平衡荷载是根据墩体两侧爬模脚手架的自重差值及所承受荷载的差值与截面形心到脚手架中心的距离的乘积计算而出,根据本案例桥墩爬模设计方案中所给出的爬模设计荷载计算出不平衡弯矩为487.5 kN·m,截面温差就是根据温度传感器对浇筑前截面温差进行实测得到。
其中,λ,λ,λ和λ分别为墩顶初始偏位、风荷载、施工不平衡荷载和截面温差引发的墩顶偏位系数。这些系数项的具体表达式为:

其中:λ,λ和λ这3个系数均带有初始缺陷Δ的耦合影响,这表明初始缺陷与风荷载、不平衡力矩和截面温差效应有耦合作用[10]。在高墩偏位的计算过程中,若不考虑这一耦合效应,可能使计算结果的精度降低。
2 高墩垂直度偏差施工预控方法
2.1 无迹卡尔曼滤波的基本原理
当高墩桥梁采用节段施工方案时,其可视为一个动态的系统,而任意的动态系统可采用状态空间方程进行描述:
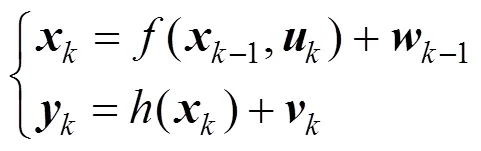
其中:为状态量;为观测量;为控制量;,分别代表系统状态噪声量和观测噪声量,通常均假设为高斯白噪声,即的分布为N(0,),的分布为N(0,),和分别为协方差矩阵;(∙)为非线性的状态转移函数;(.)为非线性的测量函数;下标表示第时间步。
式(8)描述了动态系统从1时刻向时刻演变的过程,可采用无迹卡尔曼滤波(Unscented Kalman Filter,UKF)进行求解。UKF的基本思路是通过近似非线性函数的概率分布得到状态量第步的后验均值和协方差,而不是对非线性函数做近似处理来实现非线性变换,从而避免了求解非线性函数的雅可比矩阵,且理论已经证明UKF能以至少二阶精度逼近非线性系统的均值和协方差[11−13]。其基本的计算流程如下。
1) 设定合适的初始值0及初始协方差矩 阵0:
其中:上标H表示转置。





4) 状态更新,即采用第步测试的观测量修正预测的第步状态值,并更新系统状态的协方差矩阵[14]。首先计算第步的滤波增益:

然后,通过得到的滤波增益更新状态值及其方差:

5) 重复以上第2)~4)步,从而得到各个时间步的状态值和观测值。
从以上流程可知,UKF主要分为2步,预测和更新。预测步骤可以得到下一时间步的预测值,而更新步骤为下一步预测提供更接近真值的状态量[15]。
2.2 基于UKF的高墩垂直度偏差预控方法
在桥梁高墩阶段施工过程中,假设已施工第−1节段,需确定第节段的预偏值y。若将墩高x−1视为状态量,将预偏值y视为观测量,将第节段的桥墩高度u视为控制量,根据无迹卡尔曼滤波原理并引入第2节的理论推导,可建立高墩施工的状态空间方程:

其中:w−1为施工过程中的动态噪声,主要由测量第节段桥墩高度的仪器及人为测量偏差引起;v为测量噪声,主要是由测量风速、温度的仪器及人为测量偏差引起。由于同一工程中通常采用同一种设备且测试人员也相对固定,故假设各节段的动态噪声和测量噪声不变,即0=1=…= w;0=1=…=v,其中为桥墩总节段数。
在建立桥墩施工的状态空间方程后,可采用UKF的求解过程确定浇筑第节段的预偏值,并通过在立模时加入预偏值进行预偏控制。具体的预控过程如下:
1) 在第1节段施工完成后,实测桥墩偏位1,并设置合适的方差1,动态噪声和测量噪声;
2) 按式(10)计算sigma点集;
3) 当第2节段浇筑的模板已基本架立就位且仅差预偏控制时,测量第2节段桥墩浇筑高度2,将实测风速换算成等效风荷载2,代入不平衡弯矩2,根据实测求出截面温差2;然后按式(15)预测第2节段桥墩高度2|1和桥墩偏位2|1;
4) 根据预测的2|1进行模板预偏控制,然后浇筑第2节段的混凝土;
6) 按式(13)~(14)计算2和2;
7) 重复进行第2)~6)步,直至施工到最后一个节段。
3 某桥梁高墩垂直度预控实例分析
3.1 桥梁基本概况
某高墩连续刚构桥的跨径布置均为106+200+ 106 m。其中,上部结构采用单箱单室截面,下部13号和14号桥墩采用双肢等截面矩形空心薄壁桥墩,在墩底和墩顶均设有4 m高实体段。墩身底部采用箱形墩,截面尺寸为14 m×8.5 m,上部采用双肢矩形空心薄壁墩,截面尺寸为8.5 m×3.5 m,双肢间中心距离10.5 m。13号墩的墩高为147 m,其施工方案为节段现场浇筑,每节段的高度为3 m,共划分为49个节段,如图2所示。

图2 节段划分图
3.2 预控结果分析
根据第2.2节中所提的垂直度预偏控制方法和步骤,取1=1×10−6;动态噪声方差=1×10−4和测量噪声=25。以2.2小节中的步骤进行模板调整,如此重复以上的流程便可对桥墩每一节段的立模值进行计算,继续对后续的桥墩节段实施控制。同时,本节采用有限元软件Midas模拟部分节段在传统控制手段下的垂直度偏位情况,如图3所示。

(a) 纵桥向偏位;(b) 横桥向偏位
为了量化垂直度波动的剧烈程度,定义

式中:=总节段数,δ为第节段桥墩偏位,即每一节段偏位值的绝对值的平方和除以总节段数,此参数的定义参照了方差的概念,这是统计学中较为常用的估计数据离散程度的参数。同时为了量化墩体结构的线型引入概率统计意义上偏度的概念,描述垂直度整体偏离程度,根据概率论中对偏度的计算可知:

定义全高垂直度=max/,其中为墩身总高度。
根据图3可知:
1) 在采用卡尔曼滤波方法控制时,桥墩纵桥向和横桥向偏位最大值为6 mm,远远小于规范所规定的30 mm[20],说明此方法在工程实际中有较好的应用价值。最大偏位值出现在顺桥方向的大里程方向和横桥向正方向,这种偏位形式可能与施工现场的操作环境、施工人员的操作习惯有关。
2) 纵桥向和横桥向的偏位值均呈现波动形态,这是由于现场施工误差及人为因素干扰所形成的。经计算可知,采用卡尔曼滤波方法控制时,纵桥向和横桥向偏位值的分别为9和8,说明纵桥向和横桥向偏位值的波动较小,整体波动幅度小于5 mm。纵桥向和横桥向的偏度分别为1.08和0.57,由偏度的数学统计意义可知,当>0时,桥墩整体偏位向纵桥向小里程方向和横桥向的负方向偏移,根据的数值大小可知纵桥向的整体偏移大于横桥向。
3) 通过有限元模拟部分节段在传统控制手段下的偏位情况并与无迹卡尔曼滤波方法做比较,整体趋势上来看基于无迹卡尔曼滤波的控制方法要优于传统方法,当桥墩小于30 m时,部分节段在传统控制手段施工下略优于卡尔曼滤波方法,这可能与桥墩高度较低所受风荷载、日照温度荷载影响较小有关。当桥墩高度大于30 m时,卡尔曼滤波方法的优势显现出来,说明在外荷载的影响下卡尔曼滤波方法仍可以对垂直度进行控制,且效果 较好。
4) 由图3可以看出,采用传统控制手段时,纵桥向偏位最大达20 mm,横桥向达27 mm,而采用卡尔曼滤波方法纵桥向和横桥向的最大偏位值为6 mm。根据规范对垂直度限值小于30 mm的规定,这2种控制方法均可以满足。但采用传统控制手段时,桥墩纵桥向和横桥向偏位值的分别为75.5和153.5,表明纵桥向和横桥向偏位值的波动较大,不利于桥墩整体线性控制。根据通过计算可知采用卡尔曼滤波方法全高垂直度K=4.1×10−5,采用传统控制方法的全高垂直度K=18.4×10−5,可见采用卡尔曼滤波方法对垂直度进行控制,精度可提高4.5倍。
5) 根据引入的方差和偏度指标对比传统控制手段与卡尔曼滤波控制方法,各指标如表1所示。从方差来看,采用传统控制手段,纵桥向和横桥向偏位的分别为采用卡尔曼滤波控制方法时的8.4倍和19.2倍,说明采用无迹卡尔曼滤波方法可以有效控制墩身的偏位幅度。从偏度指标上可以看出无论哪种控制方法,墩身的偏位均向纵桥向小里程和横桥向正方向偏移,从数值大小来看,传统控制方法的纵桥向和横桥向偏度分别是无迹卡尔曼滤波控制方法的1.3倍和2.4倍,故基于无迹卡尔曼滤波的控制方法效果较传统控制方法好。

表1 控制指标对比
3.3 参数影响分析
为了探究无迹卡尔曼滤波算法中参数选取对高墩控制系统精度的影响,以均方根误差(RMSE)和平均绝对误差(MAE)为指标度量系统噪声方差,测量噪声方差和初始方差1对系统精度的敏感性[16−18]。
1) 当取不同值时,RMSE和MAE的计算结果如表2。从表2中可以看出,当值增大时,RMSE和MAE的计算结果也随之增大,且其幅度改变较大,说明的参数取值对于精度影响较大。根据趋势可知,当取值越小RMSE和MAE越小,也就是说测量得到的误差越小,但根据测量仪器本身误差的影响,最小值取25,所以在高墩控制方程中参数取值为25,当>100时,RMSE和MAE的取值会大于10,这可能会造成高墩偏位实测值误差大于10 mm,所测得的偏位数据很有可能会超过规范限值的要求。

表2 参数R的敏感性分析
2) 当取不同值时,RMSE和MAE的计算结果如表3。从表3中可以看出,当增大时,RMSE缓慢增加,MAE有所波动。整体来讲的取值对于精度而言并不敏感,这可能与状态方程的建立有关。对于的选取应从实际出发,按规范规定墩体高程的偏差应不大于10 mm,经过单位换算可知,当<0.000 1时,对于实测偏位值的精度影响稳定在5 mm以内,所测得的偏位数据符合规范限值的要求。
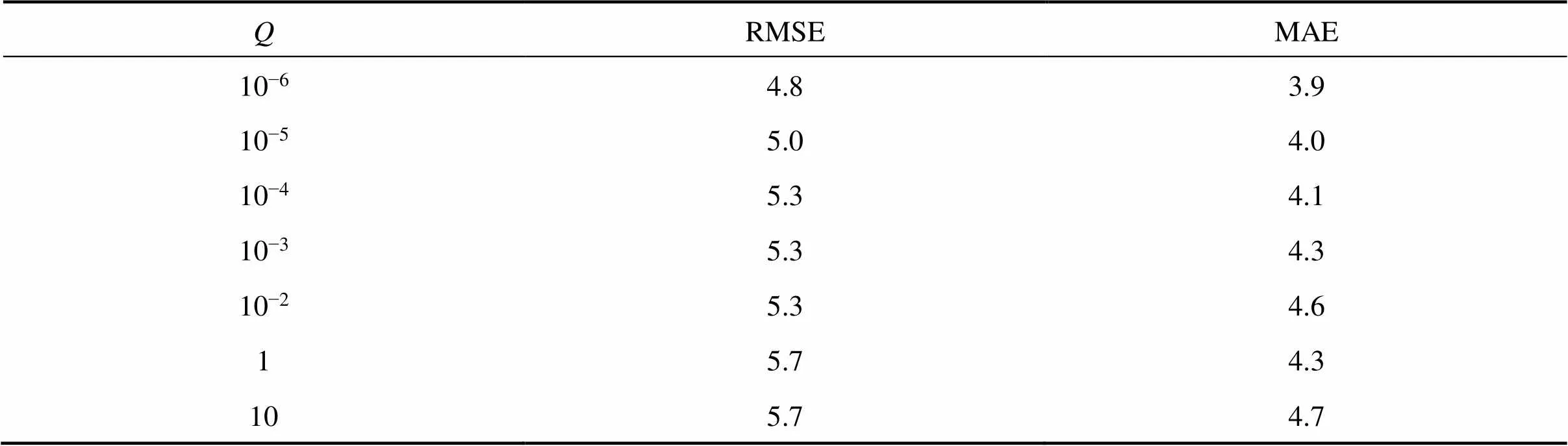
表3 参数Q的敏感性分析
3) 当1取不同值时,RMSE和MAE的计算结果如表4。从表4中可以看出,当1<0.000 01,RMSE的取值稳定在4.5,当1>1时,RMSE的值稳定在5.5,当0.000 01<1<1时,RMSE计算结果变化并不大,也就是说1对于实测偏位的精度影响并不大。通过其他文献[14]可知1的取值应尽可能接近0所以1取小于0.000 01时均可,但考虑到MAE指标,发现1取0.000 001时,MAE更小,可使最后的实测结果更加优化,所以本文在计算时选取1=0.000 001。

表4 参数P1的敏感性分析
4 结论
1) 将外界所受荷载简化为方便计算的力学模型,选取某截面建立状态平衡方程,得到墩顶位移的解析解,为构建状态空间方程提供理论依据。
2) 构建基于无迹卡尔曼滤波的超高墩垂直度控制系统,并应用于工程实践,结果显示此种控制技术可将墩顶横桥向和纵桥向偏位值控制在6 mm以内,远远小于规范所规定的30 mm。而采用传统的控制手段,墩身最大偏位为27 mm,经过计算基于无迹卡尔曼滤波的控制手段可将控制精度提高4.5倍。
3) 将统计意义上的方差与偏度的概念引入垂直度的控制指标中,表征偏位幅度,表征整体偏移方向,采用卡尔曼滤波方法控制的与均小于传统控制方法,说明卡尔曼滤波控制方法优于传统控制方法。
4) 以RMSE和MAE为评测指标对,和1进行参数敏感性分析,讨论参数的合理取值范围,并给出参数的最优取值。当=25,<0.000 1,1=0.000 001可有效提高高墩实测偏位值的精度。
[1] 铁怀民, 姜欣宇. 桥墩施工偏差对高墩桥梁性能的影响[J]. 交通科学与工程, 2017, 33(2): 31−36.TIE Huaimin, JIANG Xinyu. The influence of pier construction deviation on the performance of high pier bridge[J]. Journal of Transport Science and Engineering, 2017, 33(2): 31−36.
[2] 宋嘉, 张敏, 李银斌. 考虑初始缺陷和多种荷载作用的高墩稳定性分析[J]. 重庆交通大学学报(自然科学版), 2012, 31(2): 199−202.SONG Jia, ZHANG Min, LI Yinbin. Stability analysis on high piers with consideration of initial imperfection and multiple loads[J]. Journal of Chongqing Jiaotong University (Natural Science), 2012, 31(2): 199−202.
[3] 杨霞. 大温差地区薄壁高桥墩垂直度的温度影响及应对措施[J]. 建筑机械, 2018(2): 101−103.YANG Xia. Temperature effect analysis of verticality for thin-wall high pier in large temperature difference area[J]. Construction Machinery, 2018(2): 101−103.
[4] 唐峰, 李德建, 安里鹏. 日照辐射对高墩桥梁墩身线形影响与控制研究[J]. 铁道科学与工程学报, 2016, 13(10): 1970−1976.TANG Feng, LI Dejian, AN Lipeng. Research of solar radiation influence on pier's line shape and alignment monitoring of high-pier bridge[J]. Journal of Railway Science and Engineering, 2016, 13(10): 1970−1976.
[5] 刘衡. 空心薄壁高墩垂直度控制方案分析[J]. 湖南交通科技, 2016, 42(3): 138−141.LIU Heng. Analysis of verticality control scheme for hollow thin-walled high piers[J]. Hunan Communication Science and Technology, 2016, 42(3): 138−141.
[6] 耿波, 段琼林, 孔小军, 等. 基于应变的桥墩垂直度监控方法研究[J]. 城市道桥与防洪, 2015(12): 48−50.GENG Bo, DUAN Qionglin, KONG Xiaojun, et al. Study on monitor method of pier verticality based on strain[J]. Urban Roads Bridges & Flood Control, 2015(12): 48−50.
[7] 陈健. 公路桥梁高墩施工阶段稳定性分析与施工控制技术[D]. 武汉: 武汉理工大学, 2012.CHEN Jian. Stability analysis and control technic on high piers of highway bridge at construction stage[D]. Wuhan: Wuhan University of Technology, 2012.
[8] 许娅娅, 王月莉. 大跨径高桥墩垂直度观测方法和精度分析[J]. 中外公路, 2006(3): 21−23.XU Yaya, WANG Yueli. Verticality observation method and accuracy analysis of long span and high bridge piers [J]. Journal of China & Foreign Highway, 2006(3): 21− 23.
[9] 刘志刚, 陈艾荣. 桥梁顺风向等效风荷载计算方法及其分布[J]. 同济大学学报(自然科学版), 2003, 31(8): 888−894.LIU Zhigang, CHEN Airong. Calculation methods and effective distributions of equivalent alongwind loads on bridges[J]. Journal of Tongji University, 2003, 31(8): 888−894.
[10] 尹冠生, 赵振宇, 徐兵. 太阳辐射作用下拱桥温度场研究[J]. 应用力学学报, 2014(6): 939−944.YIN Guansheng, ZHAO Zhenyu, XU Bing. Study on the thermal field of arch bridge by solar radiation action[J]. Chinese Journal of Applied Mechanics, 2014, 31(6): 939−944.
[11] Julier S, Uhlmann J, Durrant-Whyte H F. A new method for the nonlinear transformation of means and covariances in filters and estimators[J]. IEEE Transactions on Automatic Control, 2000, 45(3): 477− 482.
[12] Julier S J. Unscented filtering and nonlinear estimation [J]. Proceedings of the IEEE, 2004, 92(3): 401−422.
[13] CUI X, JING Z, LUO M, et al. A new method for state of charge estimation of lithium-ion batteries using square root cubature Kalman filter[J]. Energies, 2018, 11(1): 1−21.
[14] LI W, WEI G, HAN F, et al. Weighted average consensus-based unscented Kalman filtering[J]. IEEE Transactions on Cybernetics, 2017, 46(2): 558−567.
[15] CHANG L, HU B, LI A, et al. Transformed unscented Kalman filter[J]. IEEE Transactions on Automatic Control, 2013, 58(1): 252−257.
[16] Radhakrishnan R, Yadav A, Date P, et al. A new method for generating sigma points and weights for nonlinear filtering[J]. IEEE Control Systems Letters, 2018(99): 1−1.
[17] DONG G, WEI J, ZHANG C, et al. Online state of charge estimation and open circuit voltage hysteresis modeling of LiFePO4battery using invariant imbedding method[J]. Applied Energy, 2016, 162(1): 163−171.
[18] Narasimhappa M, Sabat S L, Nayak J. An improved adaptive square root unscented Kalman filter for denoising IFOG signal[C]// International Symposium on Intelligent Signal Processing & Communication Systems, 2014.
[19] JTG/T 3360−01−2018, 公路桥梁抗风设计规范[S].JTG/T 3360−01−2018, Wind-resistant design specification for highway bridges[S].
[20] JTG F80/1−2017, 公路工程质量检验评定标准第一册土建工程[S]. JTG F80/1−2017, Inspection and evaluation quality standards for highway engineering section 1 civil engineering[S].
High pier vertical deviation control method based on unscented Kalman filter
MA Cheng1, SHI Xiaobing1, ZHANG Qi2, GAO Kai2
(1. China Construction Fourth Engineering Bureau Zhuhai Branch, Zhuhai 519000, China; 2. School of Civil Engineering, Chongqing University, Chongqing 400045, China)
In order to solve the problem of lack of theoretical basis for the pre-control of ultra-high pier vertical deviation, and to improve the accuracy of ultra-high pier verticality, this paper deduced the formula of ultra-high pier deviation under the influence of initial defects, sunshine temperature difference load and wind load comprehensive factors. Combining the theoretical basis with the unscented Kalman filter method, the pre-control state equation of the ultra-high pier vertical deviation was constructed, and the prediction and correction of the vertical body value of the pier body based on the pier height was realized, which forms a kind based on no trace. The Kalman filter ultra-high pier verticality pre-control method is compared with the traditional control method, and the method is improved by 4.5 times. And the maximum deviation value is only 6 mm, which is much smaller than the specification limit. The influence of each parameter on the proposed method was obtained, and the reasonable range of values of each parameter was obtained. According to the research of this paper, the theoretical technology of pre-control of ultra-high pier vertical deviation is established, which provides an effective way to guarantee the verticality of ultra-high piers.
ultra-high pier bridge; verticality control; unscented Kalman filter; bias value prediction
U443.22;U24
A
1672 − 7029(2020)03 − 0645 − 08
10.19713/j.cnki.43−1423/u.T20190457
2019−05−26
中建四局科技课题(CSCEC4B-2018-KT-24)
高凯(1988−),男,四川南充人,博士研究生,从事桥梁、结构检测、加固、健康监测和结构可靠度方面的研究;E−mail:gk1988@cqu.edu.cn
(编辑 阳丽霞)
