激光/红外复合扫描引信目标识别算法
2020-04-07郭甲崇
郭甲崇,刘 星,袁 俊,吕 浩
(1.西安工业大学,陕西 西安 710021;2.昆明物理研究所,云南 昆明 650000)
1 引 言
激光引信具有高分辨率、方向性好、抗电磁环境干扰能力强等特点[1]。线阵激光/红外复合引信可同时扫描目标的顶部三维轮廓特征和顶部红外辐射特征,通过对激光信息和红外信息的综合分析即可实现目标判别。目前对复合探测的目标识别方法有基于简化逻辑模式识别的单点激光红外复合识别算法、基于小波变换的面阵激光红外复合识别算法、基于PCA的线阵激光红外复合识别算法等[2];其中方法1判别简单,但识别可靠性不高;方法2因其具有超大面阵像元,可获取高分辨率的图像,但也因此使得计算量大,成本较高,实时性不足;方法3介于1、2之间,具有较好的判别目标的能力,但目前对复合探测体制中目标的关联信息应用不够充分。由于目标的关联信息往往比单通道的探测信息具有更高的可信度,所以基于关联信息对目标进行识别可靠性更好。针对上述问题,本文提出了基于模糊理论的线阵激光红外复合目标关联识别算法,以解决目标关联信息应用不足、识别算法过于复杂、实时性不好等问题。
2 线阵扫描模型
线阵激光/红外复合探测引信每探测采样一次可获得目标顶部的一列的像素信息,当弹体以一定速度掠飞过目标时,引信通过平推式扫描采样可获得完整的目标顶部轮廓高程信息和红外辐射灰度信息[3-5]。如图1所示复合引信采用的是主动式激光扫描探测和被动式红外扫描探测,引信将探测到的信息送到信息处理模块,提取目标特征并进行识别判断[6]。

图1 激光红外复合推扫示意图
引信搭载弹体同时扫描出目标的高度信息和红外辐射强度信息,线阵激光探测器和线阵红外探测器同时以相同n元线阵形式并行排列,则每扫描一次可同时得到一个高程序列值XA和灰度序列值XB:
XA=(x1,x2,x3,…,xn)T
XB=(x1,x2,x3,…,xn)T
假定扫描完整个目标共采样m次,得到m个序列,形成m×n阶两个矩阵[7-8]:
(1)
(2)
fA(i,j)与fB(i,j)分别为线阵激光探测器扫描出的目标高程矩阵和线阵红外探测器扫描出的目标灰度矩阵,它涵盖了目标的顶部轮廓信息和顶部红外辐射强度信息[9],并且轮廓信息和红外图像信息在空间分布上是相关的。
3 目标识别算法
3.1 识别机理
采用线阵激光/红外探测器对目标掠飞扫描获取目标顶部高程轮廓信息和目标顶部红 外辐射强度信息,通过对两类信息进行预处理并提取相应的激光图像特征和红外图像特征,将两类特征进行特征信息关联,得到目标的关联特征,分别对三类特征使用模糊识别算法,求出三类特征分别对应的目标识别概率P1∈[0,p1],P2∈[0,p2],P3∈[0,p2]。将三个识别概率区间划分小Pi∈[0,p1i)、中Pi∈[p1i,p2i)、大Pi∈[p2i,pi],i=1,2,3三个等级,再次使用模糊识别求出目标最终识别概率P。对P≥η的目标为真目标,反之,为假目标。目标识别流程如图2所示。
3.2 基于模糊推理的目标识别算法
3.2.1 建立元素集
集合Z为元素集,又称论域,其一般元素用z来表示,z在Z的子集A由隶属度函数μA(z)表征,它的值域为[0,1]。μA(z)表示z隶属于A的程度,μA(z)越接近于1,表示z隶属于A中程度愈大。
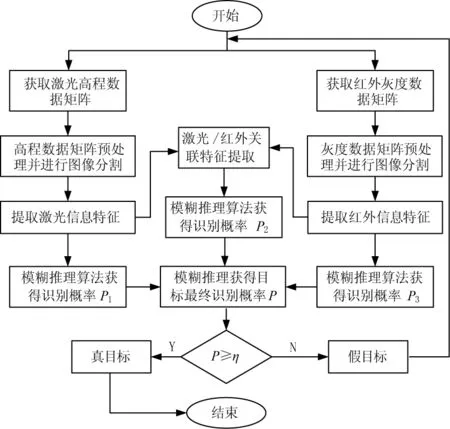
图2 目标识别流程框图
从目标中提取了i个特征参量,可建立i个元素集Zi(i=1,2,…,n),每个特征参量可划分三个等级,故每个元素集可设置三个子集。
(3)
输入隶属度函数如图3所示。

图3 输入隶属度函数
3.2.2 建立目标识别的模糊输出评价集

建立其相应的模糊输出的隶属度函数:
(4)
输出隶属度函数如图4所示。
3.2.3 建立模糊规则
(5)
根据模糊规则以及模糊化输出的结果,采用Mamdani模糊推理法对输出结果进行推理,并利用中心平均法对模糊推理的结果去模糊化。
最终求得去模糊化的结果即为目标识别的隶属度(识别率)。

图4 输出隶属度函数
4 目标信息特征提取与识别
实验中线阵激光探测器和线阵红外探测器以推扫的形式扫描如图5待测车辆目标,分别获取激光、红外的探测数据并对其目标信息特征提取及识别。

图5 待测目标的图像
4.1 激光扫描数据处理及特征提取
实验目标顶部的不同区域存在高低差异,在数据处理模块中将获得的高程数据矩阵归一化为对应的灰度数据矩阵,然后进行图像预处理并提取目标的特征信息。
4.1.1 顶部轮廓图像预处理
激光探测获取的高程数据归一化为灰度值图像后,对图像进行去噪,由于顶部各轮廓区域的边界处存在变化剧烈的灰度值,用canny算子对图像进行处理,将目标各个区域分割[10]。
对待识别目标顶部轮廓处理步骤:
1)通过平滑滤波处理,对图像进行滤波,如图6(a)和图6(b)所示为图像滤波前后的图像。
(6)

2)计算滤波后的图像的梯度幅值M(i,j)和梯度方向θ(i,j)。
(7)
3)得到的梯度幅值图像内部各区域的边界比较粗糙,故对图形进行非极大值抑制,从而细化了边缘。利用双阈值算法检验并边缘连接。在区域分割后图像fA′(i,j)中用0代表边缘,1代表非边缘。如图6(c)是目标区域分割后的图像。
图6 滤波后图像和分割后的图像
4.1.2 顶部轮廓特征提取
顶部区域分割后,提取各区域的面积和质心特征。
对区域分割后的图像fA′(i,j),求其每个区域的边缘像素,设目标顶部轮廓中有g个区域,每个区域的边缘有x个像素组成,对区域的边缘像素重新编码为Bg(ix,jx),x=0,1,…,n,
g=0,1,…,m。
某一区域的质心为:Gg(ig,jg),g=1,2,…,m。
质心(重心)横纵坐标的求法:
(8)
某一区域面积大小(区域像素个数)为:
(9)
式中,Ag为某一连通域(区域)内的fA′(i,j)=1所有像素点的集合。真实目标中被选中的区域 叫做基准区域,其面积大小A0∈(amin,amax),可由真实基准区域来确定待测目标的基准区域的位置。
如果满足:amin≤Ag≤amax
则g区域为待测目标的基准区域。提取其质心Ggig,jg作为整个目标的基准点G0(ig0,jg0)。
4.1.3 进一步提取激光图像特征及目标识别
(10)

(11)

对两特征参量模糊化,建立相应的输入输出隶属度函数以及规则,应用模糊推理求出目标的识别率P1。
4.2 红外数据处理以及特征的提取
将红外辐射较强的图像区域分割出来并提取该区域的峰值特征信息。
4.2.1 红外图像处理及特征提取
1)红外图像增强

2)基于Otusu方法进行图像分割处理
为从所扫描图像中分割出出目标辐射特较强的区域,采用Otusu方法对图像进行处理,通过处理得到的最终的阈值为117,此时图像的可分离度量为0.912,得到了阈值分割分割后图像gB。
3)红外图像特征细化
对图像gB进行边界亮对象抑制,对辐射特征进一步细化,获得如图7的红外强辐射图像,接着删除图像中面积较小的红外辐射区域得到如图7的图像gB′。

图7 对扫描的红外图像进行图像处理的过程
4.2.2 提取红外辐射的峰值特征
(12)


图8 红外辐射最强峰值点和极大值点
4.2.3 进一步提取红外图像特征及目标识别

(13)

(14)

4.3 红外激光多源特征关联与目标识别
对激光特征与红外特征的关联,最终归结到目标顶部轮廓中的基准面的质心点(基准点)G0(ig0,jg0)和红外辐射峰值点Tk(ik,jk)的关联,两类点映射到目标的三维轮廓中进行空间距离和空间角度的关联。
(15)
由真实目标得到目标的标准空间距离S0和标准角度θ0,求S0和θ0与对应的待测目标的Sk和θk的误差,通过误差来判断待测目标与标准目标的接近程度(误差可以用“较小,中等,较大”来评断),误差越小则说明与标准目标的接近程度越高。空间距离和角度可以认为是对目标识别中的两个主要因素,并且共同决定着目标识别的结果。两种误差可用ΔSk和Δθk来表示,公式如下:
(16)
式(16)中的ΔSk和Δθk可进行等级划分,空间距离误差的等级划分:a等级ΔSk∈[0,a1)、b等级ΔSk∈[a1,b1)、c等级ΔSk∈[b1,c1];角度上的误差等级划分:a等级Δθk∈[0,a2)、b等级Δθk∈[a2,b2)、c等级Δθk∈[b2,c2]。对两类参量进行模糊化,建立相应的隶属度输入输出函数,制定相应的规则,求出目标的识别概率P3。
4.4 复合目标识别
三种识别概率P1、P2、P3,分别是激光红外以单模和双模工作时得到目标识别概率,用模糊识别原理分别建立三种识别概率的输入输出隶属度函数并建立相应的规则将系统在三种工作情况下的识别概率融合,求出目标最终识别概率P。
5 仿真及实验
仿真实验中,激光探测系统中发射脉冲频率f=3.5 kHz,红外探测系统为被动式探测,线阵激光和红外探测器搭载非旋转的平台以v=250 m/s的速度飞行,弹体平台距地面为20 m。线阵的激光/红外探测系统分别扫描截取一个32×64的待测目标的信息矩阵。
基于matlab 仿真软件对所得到激光高程值矩阵和红外灰度值矩阵进行仿真。得到分割后的目标的顶部轮廓图像和顶部红外辐射图像,从中提取出目标顶部轮廓图像中各区域的质心和面积特征,以及目标顶部发热区域的面积和区域辐射峰值点特征,对这些特征按照算法处理,最终得出激光系统工作时的识别概率P1,红外系统工作时的识别概率P2,以及激光/红外系统同时工作时两者特征关联时的识别概率P3。
将三个识别概率P1、P2、P3作为新的模糊集,建立新的输入输出隶属度函数以及规则,运用模糊推理得到目标的最终识别概率P。如图9是建立的基于规则的模糊逻辑控制器。
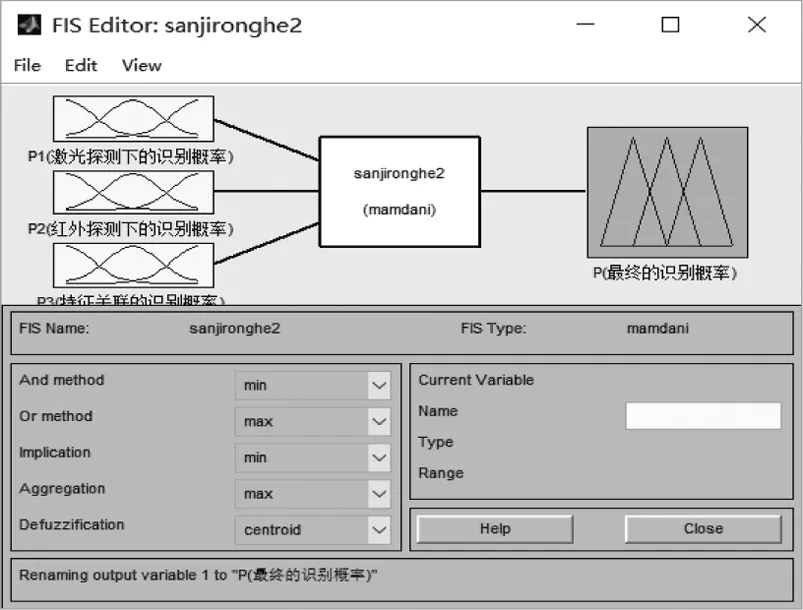
图9 基于规则的模糊逻辑控制器输入输出界面
对目标识别的仿真结果如表1是在建立好的基于规则的模糊推理系统中给出10组模糊逻辑输入(三个分识别概率分别为P1、P2、P3),并得出了相应输出结果(最终识别概率P)。
在基于规则的模糊控制器中给出模糊输入为激光/红外单模工作时的各自识别概率以及两者特征关联得到的识别概率时,输出一个复合识别概率。通过分析表1中数据可得输出的复合识别概率在一定程度上是大于模糊输入的三个分识别概率。在一些输入的识别概率是小于目标能够被识别的识别概率的阈值,但其最终识别概率大于识别概率的阈值,使系统能够判别目标。

表1 不同的分识别概率下的输出最终识别概率
仿真结果说明基于关联信息的模糊识别算法识别能力更强,具有更强的抗环境干扰能力,优于单模探测器识别方法。
如图10是用三维曲面的形式表示在模糊输入为三个分识别概率两两组合时,经模糊推理的输出结果。

(a)输入为P2与P1

(b)输入为P1与P3

(c)输入为P2与P3
图10(a)、(b)、(c)分别是分识别概率P1与P2,P1与P3,P2与P3的两两组合判断结果,通过比较可以看出,在模糊输入为P1与P2的组合时,输出的结果在很大范围上要小于P1与P3和P2与P3的两种组合形式的输出结果。分析出现这种结果的原因,是由于后两个形式的组合中存在激光/红外特征关联的识别概率P3,它是基于线阵激光/红外探测结果的两者特征关联求出的识别概率,说明关联探测信息的识别可靠性优于单模信息的可靠性。
5 结 语
基于关联的线阵激光红外复合模糊识别算法核心是将目标的顶部轮廓特征和红外辐射的图形特征进行关联信息提取。本文采用canny算子和自动阈值等图像处理算法提取目标信息特征,通过对目标轮廓特征与红外特征中关联的特征点进行距离和角度信息上的关联,然后与真实目标相应的特征信息对比,再基于模糊推理理论完成对目标的判别。该方法适用于对抗环境干扰要求较高的战场环境。仿真及实验表明基于关联的算法具有较强的实用性,易于实现,通过调整真实目标的模型参数,可实现对多种战场目标的判别。
