基于物理模型的汽车空气动力学研究综述
2020-03-29刘锦生徐胜金王庆洋鲍欢欢
刘锦生, 徐胜金,*, 王庆洋, 鲍欢欢, 王 勇
(1. 清华大学 航天航空学院, 北京 100084; 2. 中国汽车工程研究院股份有限公司, 重庆 401122)
0 引 言
汽车行驶与气流相互作用,会引出非常复杂的流体力学问题。图1给出了一个行驶的汽车与空气相互作用的示意图。从固定在车身上的坐标系观察,气流围绕汽车运动并最终在汽车尾部汇合。无论是车顶还是车底,远离汽车的位置(数学上定义为无穷远)流动速度与来流速度v相同。汽车是三维钝体,即垂直流向方向的物理尺度相当。车身顶部鼓起,而车底可看成具有表面结构的平板,流动经过车顶和车底时流动特征有本质差别。一般情况,以车身长度定义的雷诺数范围Re=5×105~107,即车身周围的流动基本上都是湍流。所以,汽车周围的流动既有三维的湍流绕流,也有平板边界层流动,这些流动经过车身发生流动分离、产生剪切流、生成大尺度涡结构,并在尾部汇合、混合,形成含有丰富涡系的尾流。

图1 车身周围的流动
这些复杂的流动与气动力有紧密关联,根据雷诺输运定理,其关系可用式(1)和(2)定性描述:

(1)
M=r×∑F
(2)
式中,Π和S分别是围绕汽车选定的控制体的体积和表面积,F为气动力矢量,M为气动力矩矢量,U是控制体内的流动速度矢量,是时间和空间的函数,ρ是空气密度。可以看到,气动力与控制体内时空变化的流动直接相关。所以,摸清流动物理规律就能理解和控制气动力。然而,汽车周围流动非常复杂,给认识和分析带来巨大挑战:(1) 尽管Π和S选定后是不变的,但控制体内的流动是时间和空间的函数,以当前的实验和计算手段,只能做到在有限时间内、局部空间上对流动进行片面的观察,要获得全时空变化的物理量则要付出无法承受的代价;(2)不同物理量之间存在时间和空间上的关联,物理机制复杂;(3)湍流的随机性、多尺度性,以及尺度之间的耦合,导致汽车绕流问题非常复杂;(4)汽车是弹性结构,在气动力作用下可产生形变或振动,这反过来会影响接触的流体,二者耦合使气动力产生随机脉动,可能引起疲劳、宽频噪声等问题。为了以较低代价解决上述挑战问题,人们设计制作了汽车空气动力学研究模型,利用实验和计算手段开展相应的空气动力学研究。与实车相比,汽车空气动力学模型在外形进行了适度的抽象和简化,保留了与实车一样或者相似的几何特征,在相似的前提下确保模型的流体物理特征与实车可以互为映射。这样,可通过对模型的流体物理研究,弄清模型空气动力学机制和规律,建立相应的理论去理解实车的空气动力学本质,再利用这些认识和理论为实车的创新设计提供支持。值得注意的是,在汽车行业里称这种模型为汽车空气动力学标准模型或参考模型。本文为了不与流体力学基本概念冲突,称之为汽车空气动力学物理模型。
自20世纪80年代以来,国际上出现了十几种具有不同特征的模型(见表1),如Ahmed、 SAE、 Rover、Davis、DOCTON、Ford Block、GM、ASMO、RMIIT、Chrysler、MIRA、DrivAer模型等。利用这些模型,人们对涉及到的流体物理规律、气动力产生机理、气动力或流动的控制等问题进行了广泛的研究,积累了较为丰富的研究数据,为建立现代汽车空气动力学理论框架奠定了基础。 表1列出了这十几种模型的设计机构和产生时间。其中,最著名、最流行的有Ahmed、MIRA和DrivAer等3种模型。
图2给出了Ahmed、MIRA和DrivAer模型的示意图。其中,Ahmed模型与实车的形状有很大区别,也被称为类车体,其基本轮廓为规则的长方体,后背是个倾斜的斜面。模型上没有任何实车附件,如后视镜、ABC柱、车门、车窗、天线、车轮等,是一个表面光滑、棱角分明的简单几何体。MIRA模型外形已经有了车的外观,甚至带有不能转动的车轮。但其局部几何特征仍与实车有较大区别,大部分区域都是平面,面与面为直角连接,棱角分明。DrivAer外形与真车相同,面与面之间过渡圆滑,有后视镜、天线、车门、车窗、ABC柱、车轮等局部结构。上述3种模型形状从简单到复杂,是3个典型的汽车空气动力学物理模型代表。根据研究目的不同,其尺寸可以做到1∶1,也可以做成缩比模型。

表1 汽车空气动力学物理模型列表Table 1 List of automotive aerodynamic physical models

图2 Ahmed、MIRA和DrivAer模型的侧轮廓图
1 基于物理模型的汽车空气动力学研究进展
本节主要以Ahmed、MIRA和DrivAer模型为例,梳理汽车空气动力学研究成果。
1.1 气动力与绕流流场
气流绕过Ahmed、MIRA和DrivAer模型时,因模型几何外形的变化、流体存在惯性和粘性,导致流动在模型不同部位产生分离。分离的流动一般含有不同剪切强度、不同尺度的流动结构,形成包含以涡或波为典型特征结构的流动。其中,以大尺度涡为典型特征的流动结构一般称为相干结构,相干结构与汽车周围流体一起沿着流动方向持续很长的距离,成为涡街。涡街的几何特征及运动特性能反映模型上的压力的分布和变化,因而也体现了气动力的变化。以波为特征的流动结构一般出现在距离模型表面很近的薄层里,形成以高低速区分为特征的条带,这些结构与壁面摩擦力具有很强的关联。
图3是文献[18]总结的气流绕过Ahmed(后背倾角φ= 25°)模型表面后可能生成的时均涡系结构及所处的空间位置。可以看到,模型头部棱角的后面可能产生分离泡。流动向下游运动过程中,会出现发卡涡、侧壁涡、大尺度的展向涡、C柱涡等复杂的涡结构,也可能会因后背倾角不同再次产生分离泡。尾部模型底部的流动也会向上卷起在下半部形成分离泡及分离涡。这些流动结构改变了模型表面的压强,不但引起压差阻力,其向下游的输运和分离也产生了脉动力,这些脉动力是不可忽视的噪声源。因Ahmed模型特殊的几何外形,流动从模型棱角处就产生流动分离,并产生具有特点的涡结构。在较低雷诺数时,靠近头部还可能出现存在不断自循环的分离泡,这些分离泡并不稳定,随雷诺数增加会破裂消失,但它的出现已经改变了Ahmed头部的气动外形,也改变了绕流的流动特征。在模型中部,流动会再度分离并产生涡。尾部的流动分离最为明显,流动分离后不再附着在模型上,而是在模型尾部与其他流动混合向下游输运,形成结构复杂、几何特征不明显、非定常的混合尾流。
Ahmed模型在后背倾角φ=30°时阻力系数出现了一个突然间断的特殊现象,如图4所示。当φ接近30°时,倾斜的后背也会产生分离泡,使分离区增大。具有大量涡结构的区域反映了当地压强变低,导致整个模型阻力增加。当φ>30°时,分离泡破裂消失,且其他涡结构所占区域减少,使模型尾部压强迅速回升,总阻力也迅速降低。

图3 Ahmed模型周围的流动结构[18],Re =(0.45~2.40)×105
Fig.3 A conceptual model of the flow structure around the Ahmed model[18],Re=(0.45~2.40)×105

图4 Ahmed模型风阻系数随后背角度的变化关系[1]
Fig.4 Drag coefficient of an Ahmed model with different base slant angles[1]
文献[1]还对Ahmed后背倾角0°<φ≤12.5°和12.5°<φ≤30°时阻力系数从平缓到急剧上升的机理进行了研究。这个机理就是通过精细研究尾部的流动结构而获得的。当0°<φ≤12.5°,模型尾流结构基本相同,如图5(a)所示。气流在倾斜面上附着较好,到达尾部曲面后,气流从尾部垂直面顶边分离形成尾涡,随着φ增加,尾涡分离范围缩小,阻力系数减小。气流在尾部垂直面顶边和底边分离后进入尾流区形成马蹄形涡A和B,两涡与尾部垂直面基本平行并被分离泡D包围;倾斜表面左右侧边附近剪切层卷起形成一对流向涡C。在这个后背倾角区间,这些涡结构能稳定存在,模型尾部当地压强基本不变,因此,阻力系数基本保持不变。当12.5°<φ≤30°,可以看到气流在倾斜面上也产生了分离,出现了分离泡(图5(b)),改变了模型尾部的气动外形,局部压强降低;随后背倾角增加,分离泡增大,涡结构与模型尾部接触面积增加,使总的压差阻力增加。

图5 Ahmed模型不同后背角的尾部流动结构示意图[1]
Fig.5 Flow structures behind an Ahmed model with different base slant angles[1]
Ahmed模型的流场研究结果可以推论到实车。尽管实车周围流动会更复杂,但其主要的流场结构与该模型展现的类似, 与模型一样,实车后背倾角的不同对尾流的涡系、模型尾部压力分布有重要影响,仅从阻力方面考虑,后背的倾斜方式关乎着阻力系数的高低。
MIRA模型用3种背部构型反映乘用车的3种常用的车身类型,即方背式(Squareback)、快背式(Fastback)和阶背式(Notchback),如图6所示。可以看到,3种后背形状一方面影响着乘用空间,另一方面对阻力也有重要的影响[19-20]。与Ahmed模型类似,这与其尾部的流动结构有关联,尾部沿着C柱形成的2个流向涡,在背部后窗上还会产生一个流动分离区,模型尾部从下至上也会形成小的回流区。值得注意的是,分离区里含有不同尺度涡的流动结构。这些结构都对模型尾部形成低压区有贡献。低压区的大小与流向涡的强度、分离区大小及内部流动结构强弱相关,涡越强、分离区尺寸越大,引起的局部压力会越低。
(1)基于词向量与深度学习的语义相似度计算模型的优点是考虑到了文本中语义语法等信息,具有准确率较高、泛化能力较强的特点,并省去了大量的人工提取特征的工作。

图6 MIRA模型不同后背的相干结构[19]及风阻系数[20]
Fig.6 Flow structures and the drag coefficients of a MIRA model with different backs[19-20]
几种后背形式相比,快背式具有相对较低的总阻力系数。文献[21]和[22]对快背式模型周围流场大尺度涡结构的实验和数值计算结果进行了详细的总结。C柱涡两侧分别存在转动方向相反、强度较小的流向涡,模型后背分离的剪切层会进入尾部形成分离泡,模型两侧的边界层也在粘性的作用下逐渐发生流动分离进而形成更为复杂的涡系(见图7)。 这些复杂的涡系势必会对气动性能、车身污染物的附着及分离、噪声等有不同程度影响。

图7 MIRA快背式模型周围的涡结构[21-22]
同样,DrivAer模型也设计了3种不同的背部构型,其表面的时均流动结构与MIRA模型基本一致。与前2种模型一样,其C柱位置同样形成2个反向旋转的流向涡,在后窗上形成一个低压区。由于车顶与和后窗的过渡连接处相对光滑,此处的流动分离结构相对较小,相对MIRA尾部的粗壮、零散的流动结构,其表面产生的流动结构形状细小而集中(见图8)。与MIRA模型类似,快背式后背能获得更小的阻力系数。

图8 DrivAer模型Fastback尾部的相干结构[23]及不同后背的风阻系数[24]
Fig.8 Flow structures of the DrivAer fastback model and the drag coefficient of a DrivAer model with different backs[23-24]
此外,模型实验的代价低,可以获得精准的实验数据,已有汽车空气动力学物理模型丰富的研究数据可以直接被借鉴。例如,深入了解模型周围流动的能量分布,是模型受力、动力学分析一个重要的输入条件。通过对流动的动量和能量输运规律研究,也可以对类似“为什么产生这种流动结构”的问题进行回答。通过流场能量分析功率谱方法[18]以及DMD[25-26]、POD[27]等方法,可以了解流场中不同能级的结构组成以及演化特征。如Ahmed模型尾部中轴线上不同法向位置处的速度的功率谱Eu频谱信息表(见图9),尾部流动是模型不同位置产生的涡系的混合,存在多个主导频率。在距离模型尾部不同距离、不同高度位置,主导的频率也不同,说明这些涡系之间存在相互作用,具有明显的非定常性,这些频率的空间分布信息可以为流动控制方法及控制指标的选择提供依据[18]。图10为DrivAer模型流场的POD分解结果,通过分析这些模态能量的占比关系,可以为开发精度较高的低成本降阶数值模拟技术提供指导[27]。
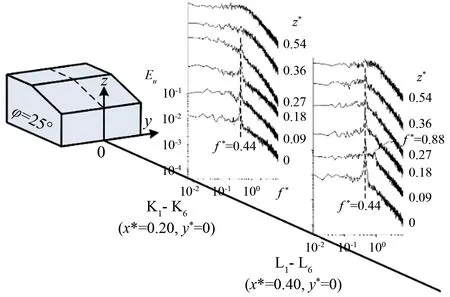
图9 Ahmed模型尾部不同位置处速度信号的功率谱特征[18]
Fig.9 The power spectral density functionEuof the hot-wire signal measured at center line in the wake[18]

图10 DrivAer模型仿真流场的POD分析[27]
1.2 流动控制
因受乘坐空间、美学的限制,在汽车造型设计中,外形的改变空间非常有限。为了追求更低的风阻,一个可能的途径是进行流动控制。流动控制方法可笼统地分为被动控制和主动控制2大类。控制实现的方式可以是开环控制也可以是闭环控制。从控制效果上看,被动控制和开环控制方法代价低、技术要求低,容易实现,但控制效果往往并不理想。闭环主动控制一直被期望能发挥更好的作用, 但闭环主动控制技术非常复杂、代价也更高,且可控性本身仍值得探讨。流动控制的目的基本上是提升需要的力分量指标,降低消耗能量的分力指标;也可能需要控制气动力的脉动使其平稳变化或远离共振、颤振,增加车辆的可操控性,减弱噪声。不管控制目的如何,机理上都是通过抑制流动分离、改变流动分离位置、延缓流动转捩、改变流动结构特征、改变流动相互作用等方式减弱低压流动结构(如涡)强度、改变其空间位置及运动特征、减小低压流动结构与物体的接触面积,从而改变气动力。流动控制在航空领域已经有成熟的技术应用案例,例如,波音、空客飞机利用翼稍小翼减弱翼尖涡对气动力的干扰,机翼及发动机外壳布置涡流发生器,推迟边界层转捩、减弱横流不稳定性、推迟横流转捩等。建筑和桥梁的流致振动控制、海洋输油管路振动的控制、水下航行器空泡减阻和噪声抑制等也都属于流动控制。流动控制不仅需要精确的理论、精确的实验方法和计算方法,也需要电测技术和传感器技术的配合,因此,流动控制具有重要的学术意义和工程价值,其控制理论和方法本身就值得研究。同样,汽车空气动力学物理模型在研发流动控制方法和技术方面也起着重要的作用,例如,在模型尾部添加扰流板[28-29]、涡流发生器[30]、安装射流装置[31-34],在表面设置微结构[35],在汽车前部添加气坝、底盘抽吸[36]等都是对模型表面的剪切层进行控制,改变其尾流特性,降低压差阻力,从而实现减阻。
文献[28]在对Ahmed模型表面的流动特征充分了解的基础上,在尾部两侧添加扰流板对主流向涡进行被动控制(见图11)。当扰流板与后背的角度接近70°时,扰流板一定程度上影响了两侧流向涡的形成,减弱了涡的强度,并给背部分离泡自由成长提供了空间。背部分离区的流动与被削弱的流向涡有很强的相互作用,进一步降低了含涡结构的强度,从而使模型尾部的压强升高,降低了模型的阻力(见图12)[28]。


图11 扰流板对Ahmed模型两侧流向涡的控制[28]

图12 阻力系数随绕流板倾斜角度的变化[28]
Fig.12 Evolution of the drag of the bluff body as a function of the angle of the flap relative to the slant surface[28]
图13为Ahmed模型(φ= 25°)尾部采用射流对尾部分离流进行主动控制后获得的尾流结构,在尾部采用主动射流控制后(蓝色为射流口),模型两侧的流向涡的尺度和强度均得到了抑制,使背部分离区的范围扩大,促进了模型尾部倾斜表面和底部表面的压力恢复。实验结果表明,选取适当射流位置和射流强度,最大可以获得29%的减阻效率[34]。
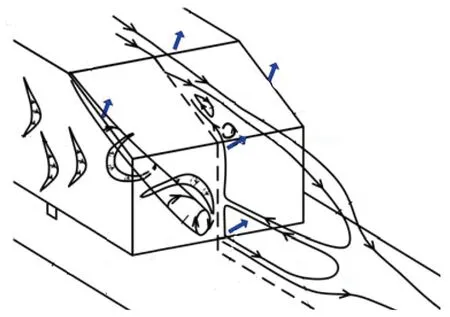
图13 Ahmed模型尾部进行主动射流控制[34]
Fig.13 Conceptual model of the flow structure under the combined actuation[34]
1.3 验证计算及对标
这些汽车空气动力学物理模型也给利用CFD研究汽车空气动力学问题带来了方便。
针对同一模型,可以选用不同计算方法、比较不同湍流模型的计算结果,以获取最合适的计算方法。图14给出了采用不同计算方法对Ahmed标准模型表面流动结构解析结果。利用雷诺平均方法可以很好地再现尾部2个反向旋转的纵向涡,但无法对瞬态流场进行精细解析;SAS-SST方法能够很好地再现尾部较大的流动结构,但对小尺度结构却很难捕捉;而大涡模拟(LES)方法对较小尺度的斜向结构和尾迹结构的展现有一定的优势,但得到的阻力值偏差却较大[37]。

图14 采用不同湍流模型计算Ahmed模型的绕流流场[37]
Fig.14 Simulation of flow around the Ahmed model using different turbulence models[37]
正是因为这些模型的便利,可以开展难度较高的非定常[38-39]、非稳态[17,18,23,40]流场数值计算研究,获得基于时间相关的流场信息,为理解汽车绕流流场提供了更丰富的素材。如文献[38]基于Ahmed模型,采用LES模拟获得了尾部横截面时均/瞬时流场结构以及气动力随时间的变化(见图15)。从瞬时流场上看,尾部流场结构具有非定常性,阻力系数呈随机的脉动变化,侧向力系数随时间也是随机变化,且存在较大幅度的低频波动,这也充分反映了流场与气动力数据之间存在内在的联系[38]。
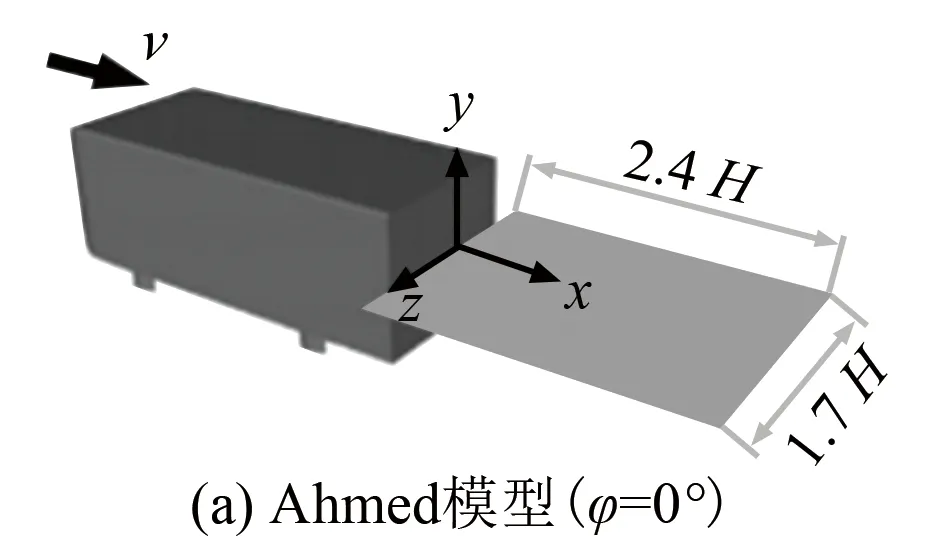


图15 采用LES方法仿真分析Ahmed模型气动特征[38]
Fig.15 Simulation and analysis of aerodynamic characteristics of Ahmed model by LES method and the plane used to visualize the flow[38]
利用这些标准模型还可以开展侧风稳定性影响[41-42]、汽车零部件(后视镜[23],见图16;车轮[24],见图17)对汽车流场和气动力的影响等方面的研究。如文献[41]对DrivAer模型进行的横侧风稳定性、非定常气动力的风洞实验和数值模拟结果表明,模型横侧风实验结果受试验环境影响较大,稳态计算方法难以预测其气动力和力矩的动态特性;文献[42]比较了方背式和阶背式构型DrivAer汽车模型转弯过程的气动性能,结果表明汽车在过弯时风阻和稳定性与直行时存在较大的差异,且方背式构型的汽车的气动特性受弯道曲率的影响更大。
此外,汽车空气动力学物理模型在CFD计算程序开发上也发挥了重要的作用,为验证CFD代码提供了测试算例。汽车CFD技术早期借鉴了许多航空CFD技术,但两者存在一定的差异,而汽车空气动力学物理模型丰富的气动力数据就成了测试和改进CFD代码准确性、考察数值仿真中的网格和湍流模型正确性的对标依据。


图16 后视镜对车窗表面压力系数分布的影响[23]
Fig.16 Effect of rearview mirror on distribution of the pressure coefficient at the side window[23]

图17 车轮转动状态对轮仓内表面压力的影响[24]
1.4 风洞实验对标
风洞、实验模型、测试手段、实验者等的不同都可能对实验结果的不确定性有所贡献,而如何控制这些因素产生的不确定性一直是个难题。利用统一的实验模型,可以减少因模型带来的不确定性,因此,这些汽车空气动力学物理模型可以用于风洞实验的对标工作。由于模型外形、尺寸等数据一致,可以很好地避免加工误差带来数据的不确定性。从大型汽车风洞的使用经验来看,不少风洞在建设和运行过程中均会选用一款或多款模型进行对标测试,确保风洞实验段流场指标或测试方法满足要求,如MIRA风洞每3个月会使用MIRA全尺寸模型对风洞的流场、测试技术进行一次校准。
汽车空气动力学物理模型也可用于分析风洞实验段阻塞比的影响[2,12,43],地面效应的影响[44]、实验段压力梯度对测试结果的影响[45-47]等实验。图18为利用DrivAer模型研究风洞实验段阻塞比对其气动力测试的影响,该数据可为风洞阻塞比修正方法提供参考[43]。文献[48-49]使用MIRA模型,研究了风洞边界层厚度对气动力测量结果的影响,为汽车风洞设计边界层控制系统提供了参考依据。
1.5 多车相互作用空气动力学研究
基于物理模型还可以进行多车相互作用(跟车、会车、超车等)空气动力学问题研究,分析评估汽车在多车相互作用下的行驶安全。文献[50]利用类车体模型,采用风洞实验测量了不同跟车距离下模型表面的压力分布、侧向力和偏航力矩,明确了跟车距离会严重影响车辆的行驶稳定性。文献[51]则采用数值仿真的方法研究了DrivAer模型超越卡车过程的空气动力学问题,分析了平均流场、瞬态流场、车身表面压力、阻力、升力和侧向力以及相应的力矩在超车过程变化。图19给出了2车不同相对位置(x/L)时的速度云图,其中DrivAer模型在超车过程中,其阻力系数会先减小后增大,这些结果对制定交通规则也有一定的参考作用。

图18 阻塞比AM/AN对DrivAer模型气动力测试的影响[43]
Fig.18 Effect of jet expansion on the drag coefficient ΔCDfor different blockage ratiosAM/AN[43]

(a) 位置x/L=-0.8

(b) 位置x/L=0.39
图19 基于DrivAer模型模拟轿车超越卡车过程中两车周围流场的变化[51]
Fig.19 Instantaneous velocity field when a car overtaking truck based on DrivAer model[51]
1.6 其他与空气动力学有关的研究
基于汽车物理模型还可以开展风噪[52-54]、污染(车窗、车身、轮毂、后视镜等)[55]、通风与冷却[25]等方面的研究。如图20所示,基于DrivAer模型,文献[52]研究了汽车轮胎噪声预测的方法,并对比分析轮毂造型、转动状态对噪声强度的影响,认为旋转状态的开式轮毂噪音水平更高;文献[53-54]探究了汽车在恒速和加速状态下的轮胎噪声情况,综合比较了轮毂衬套、发动机下护罩、车身下面板和后备箱下面板等处的降噪措施。

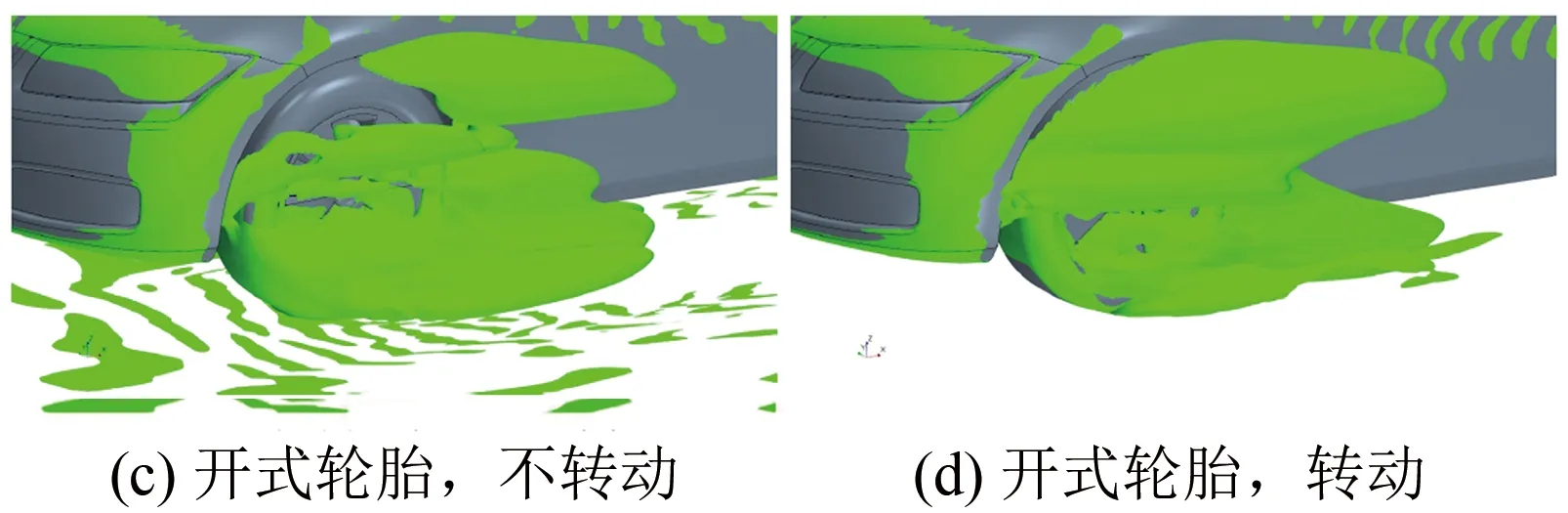
图20 不同车轮构型和转动状态下的70 dB等噪声面分布[52]
Fig.20 Acoustic power sound sources at 70 dB with wheel configurations and rotation states[52]
在污染控制研究方面,文献[55]基于改型MIRA模型采用数值方法研究车轮溅水及其对车身表面的污染,研究发现车轮溅起液滴的运动轨迹与车身外流场中的气流运动轨迹密切相关,车身两侧的车门区域、尾部的车灯区域是污染最容易富集的区域,而通过增加轮罩护板、车尾顶部导流片、车尾底部扰流板、车尾两侧导流片可降低车身表面污染程度。
最新的DrivAer模型设置了发动机热管理模块,进一步拓展了这些物理模型的使用范围,如文献[25]通过实验和数值仿真方法比较了冷却器出现流量泄漏时对底盘表面的压力分布、冷却阻力和升力的影响(图21)。
2 存在的问题
尽管基于物理模型的汽车空气动力学研究产生了许多实验和计算数据,但仍没有在此基础上形成系统的理论。研究者选用的研究模型不统一,研究数据不通用,难以形成规律性认识,为理论的形成制造了困难。而且,已有的研究中也有些问题缺乏机理性的认识,需要深入研究。例如:
(1) Ahmed模型阻力系数在后背倾角为30°时出现间断,目前的研究只有阻力系数变化和定性流场的结果,没有针对性的机理解释。这个问题可能需要利用流动稳定性理论建立相应的数学模型,进行求解计算,以获得分叉解。即便是实验研究,后背倾角在30°附近摄动时的阻力系数规律也不清楚,而对这种临界点附近流动状态的理解显然对加深理解汽车空气动力学有帮助。


图21 冷却器泄漏对冷却器周围流场和底盘高压力系数分布的影响[25]: A. 进气格栅封闭, B. 进气格栅开启(冷却器无泄漏), C. 进气格栅开启(冷却器泄漏)
Fig.21 Velocity magnitude in the center plane and pressure coefficient distribution of the three simulated setups[25]
(2) 汽车行驶过程中颗粒物、污水对车身的污染研究中,颗粒物或污水在车身表面的聚集特征仍不清楚。当前的研究主要基于运动学分析,得到了污水滴溅落的运动特征,对接触到车身后的运动及对边界层流动的影响也不清楚。
(3) 从风洞实验获得的汽车模型阻力系数,是在比较理想的流动环境中获得的,与汽车行驶过程所处的真实环境不同。因此,汽车工业也用道路滑行的方法进行阻力测试,其中包括风阻。风洞实验结果与道路测试结果之间的相关性目前还缺乏系统研究,经常是做完风洞实验还要做道路测试,造成巨大的浪费。
(4) 与汽车声学有关的科学问题,严格地讲,模型实验与实车实验是不相似的,但如果能建立其中近似的相似关系,就可以利用模型实验结果近似地预测实车结果,必定会节省资源。
除此之外,因为汽车空气动力学尚无系统的理论,只有比较多的零散数据,所以汽车空气动力学在汽车造型阶段的作用无法突显。假设汽车造型设计价值函数I的形式为:

(3)
其中,Φ表示汽车空气动力学指标函数,φi(i= 1,2,…n)代表其他指标,如美学、成本、舒适、哲学、文化等。Φ也有可能和其他一些指标相关,可以写成如下函数:

(4)
汽车最终的优化设计就是对式(3)的泛函求变分,即获得变分I= 0 时各个指标函数应该满足的条件。这里面要发挥空气动力学的作用,就必须寻找式(4)函数的显式表达,这一点与汽车空气动力学研究的系统性有关。只有全面的数据和系统的理论才能帮助设计师利用好汽车空气动力学指标。
3 展望
当前,基于汽车物理模型进行的空气动力学研究取得了丰硕的成果,积累了许多重要的数据。但还缺乏一个清晰的主线,将这些研究凝结起来,形成系统的理论。总的来看,未来的汽车空气动力学研究需要至少在3个方面尽快形成成熟的知识体系:
(1) 基于空气动力学指导的汽车造型理论。当前汽车设计首要考虑的是成本、市场、实用,需要融和美学、价值观等考虑,为空气动力学的施展限定了空间,如何利用好这一空间,需要经得住考验的、实用的理论。这方面,可以凭借对模型研究积累大量的数据,形成系统的理论,指导造型设计。
(2) 通用的空气动力学物理模型建设的必要性。当前,汽车企业众多,开发的模型不尽相同。在开发过程中,进行大量重复的风洞实验和计算,造成资源的极大浪费。利用模型帮助设计时,也会因模型的不一致,造成实验和计算结果出现很多不好控制的不确定性。在制定实验标准、计算标准上也会造成诸多的不一致,对行业内技术交流和沟通制造了障碍,造成各说各话的局面。 如果存在一个通用的空气动力学模型,针对模型可以统一实验和计算标准,更容易积累相关性强的数据,有利于理论的建立。同时,也会成为行业交流的语言,使资源得到更合理的利用。
(3) 面向未来汽车的发展,利用模型进行空气动力学数据的储备。无论是传统的汽车,还是当前的新能源汽车、未来的飞行汽车,空气动力学的作用越来越重要,为了优化设计,储备空气动力学数据,进行大数据分析,为人工智能控制、无人驾驶技术积累数据,是至关重要的。这一目的,可以先通过通用的汽车空气动力学物理模型实现,利用通用模型进行实验和计算研究,积累数据,建立数据库,实现数据共享,为未来实现利用人工智能进行无人驾驶积累学习和训练数据。
