一种结合惯导信息的红外弱小目标检测方法*
2020-03-11郭铭嘉刘会文朴宇鹏曹耀心吴建东
郭铭嘉,赵 晟,刘会文,申 涛,雷 昊,朴宇鹏,曹耀心,吴建东
(1. 陆军装备部驻南京地区军事代表局驻上海地区第三军事代表室·上海·201109;2. 上海航天控制技术研究所·上海·201109)
0 引 言
采用红外成像制导的舰载末端防空导弹在拦截远距离的弱小目标时,容易受到背景的干扰。弱小目标的灰度较弱且在图像中呈点状,大小往往只有几个像素,缺少可供识别的形状和纹理特征,因此很难将其与视场中一些同样呈点状且灰度较高的背景干扰(如海面杂波、远方船只、岛岸上的建筑和裸露岩石等)区分开来。因此导弹导引头在检测弱小目标时需要通过一定的方法抑制此类背景,增强目标信号强度。
在增强目标信号强度、提高红外图像信噪比方面已经有多种方法被开发出来,其中结构比较简洁、应用较多的方法包括基于形态学top-hat的检测方法、基于小波变换的检测方法等。为进一步抑制背景并提升分割正确率,研究人员还提出了多种新方法。Li[1]等人基于最大熵原理,提出了一套基于多重图像分割和目标特征直方图检验的方法。Deng等人[2]则通过测量图像局部区域信息熵的方法滤除背景和噪声,并与top-hat滤波、最大中值滤波等传统图像处理方法做了对比,得到了良好的效果;Deng等人[3]还尝试通过多尺度模糊测度法提升图像信噪比,并采用一种自适应阈值分割目标。除了上述的解析方法外,还有研究人员尝试使用人工智能的相关方法检测目标。Kim[4]等人提取了候选目标的灰度分布、尺寸、中心对称性等八项特征,然后通过机器学习方法筛选目标。Liu等人[5]提出了一种基于Contourlet变换和反向传播神经网络的方法。不过,人工智能方法过于依赖识别分类器的训练样本的质量,并且其对目标的特征分析和提取都只是数学统计意义上最优的,并没有对真假目标本身的物理特性加以有效的利用[6],而且当目标在视场中比较弱小且处在海面亮带等复杂背景中时,海面闪烁等干扰与目标的灰度均呈斑状分布且峰值相近,此时单帧地处理图像很难可靠地检测目标。因此更多的研究人员着眼于综合利用时空信息、连续多帧地处理图像[7],例如刘杰和安博文[8]利用目标在帧间的运动具有连续性而噪声点不具有连续性的特点,采用均值加权滤波的方法来滤除孤立噪声点,最后使用自适应阈值分割检测出小目标。而张素等人[9]则提出了一种基于时空非局部相似性的红外图像弱小目标检测方法。该方法通过引入时空域图像块模型,充分利用相邻帧图像间海面背景图像块的非局部自相关特性及每帧内非局部背景图像块间的相似特性,实现红外弱小目标检测。张雅楠等人[10]还提出了一种基于局部峰值检测和管道滤波的红外图像处理算法,首先采取局部峰值检测提取疑似目标,然后根据自适应域值处理去除多数非目标峰值,最后通过管道滤波法排除残留干扰以准确识别目标,其中管道滤波算法是一种经典的时空滤波算法,它是以目标为中心建立在序列图像空间位置上的空间管道。上述基于连续帧图像检测目标的研究均取得了较好的效果,但仍然有局限性,比如亮云和海面杂波等干扰有时也能够形成连续的航迹。
综上所述,目前各种基于红外图像的目标检测方法仍然存在三方面的不足:首先,复杂背景下弱小目标与干扰的特征非常接近,增加了提升信噪比的难度,缩短了导引头的探测距离;其次,各项算法都着眼于深化图像信息的处理和提取,因此难免要对图像的灰度、灰度梯度和熵等信息进行详细的统计,甚至引入神经网络,这就需要消耗大量的运算资源,和导引头有限的硬件资源和任务时间不甚匹配;另外,红外导引头还容易受到温度和大气湿度等环境因素的影响。显然,为了检测杂波背景下的低信噪比运动目标,单纯的图像信息是不够的,引入运动信息是抑制背景杂波、提高信噪比和目标检测性能的关键[11]。
本文提出了一种借助惯导信息辅助红外系统筛除背景干扰的方法。导弹上安装惯导系统后可以实时提取弹体的位置和速度,具有不受气象条件干扰[12]的优点。该抗干扰方法包括两个步骤:首先,基于惯导数据提取出海天线在视场中的位置并判断目标在空背景还是海背景上,进而缩小识别目标的范围;然后,通过惯导信息预估导弹对目标的视线角速度,并将结果与红外信息作比以排除干扰点。该方法引入了目标的运动特征,解决了目标与干扰具有相似图像特征的问题,而且惯导信息不易受环境因素干扰、处理时所需的运算量较小。
1 目标检测原理
1.1 检测流程概述
本文提出的目标检测方法主要包括两个关键模块:
(1)海天线提取与图像划分:根据惯组给出的导弹位置和预估的目标位置等参数(目标通常为进入末端的反舰导弹,此类目标机动能力有限,可以近似认为其作匀速直线运动。发射时武器控制系统将目标的位置和速度等参数装定进导引头中,发射后即可连续推算出目标每时刻的位置和速度),计算导弹对海天线视线和对目标视线间的夹角,根据该夹角判断目标距离海天线的远近、在空背景还是海背景上,进而缩小识别目标的范围,先排除一部分干扰。
(2)目标运动特征识别:根据惯组给出的导弹位置速度和预估的目标位置速度等参数,计算导弹对目标的视线角速度,并将该角速度值与红外图像中各个候选目标的视线角速度值相比较,排除干扰点。
上述解算过程中所需的各项参数将在导弹发射前由武控系统装定,包括发射时刻导弹和目标的位置坐标、目标运动速度等。
如下图所示,除了上述两个关键模块外还应考虑目标检测方法的完整实现流程。首先,根据当帧的惯导和红外图像信息提取出海天线、目标和潜在目标的视线角;然后根据多帧累计的信息对视线角进行平滑处理,滤除时间噪声;接着对海天线的惯导视线角和红外视线角进行匹配融合,并根据融合后的视线角筛除红外图像中不符合位置条件的潜在目标;最后,比较残留的潜在目标与目标的视线角,进一步筛除干扰。在该流程中,图像系统提取海天线与潜在目标视线角时,首先使用图像分割算法(如Tophat变换、模板匹配、Canny算子边缘检测等经典方法)将对象从图像中分割出来,然后根据刘会文等人[13]给出的坐标变换方法将红外图像坐标系中的视线角转换到惯性坐标系下,以便于与惯导信息比较或融合。需要指出的是,潜在目标的红外视线角用于和惯导信息预推的目标视线角作比较,相差过大的潜在目标将被判定为背景干扰进而被滤除,因此并不需要融合操作。但可以通过融合海天线的惯导与红外信息,得到更加准确的海天线位置。海天线的图像特征显著,从图像和惯导信息中提取时都比较容易且误差较小,因此综合平均法等经典的融合算法即可满足要求。所谓综合平均法,即把海天线的红外视线角和惯导视线角乘上权重系数后求平均,所得即为海天线的最终位置,其中权重系数可以通过对先验数据统计得到。

图1 目标检测方法的实现流程Fig.1 Flow of the target detecting method
下面分别讨论海天线提取和目标运动特征识别的相关原理和计算公式。
1.2 海天线提取与图像划分
如图2所示,R为地球半径,H1为导弹高度,H2为目标高度,h为中间变量,L1为导弹与海天线间距离,L2为弹目距离,θ为目标视线和海天线视线间夹角。

图2 海天线提取原理Fig.2 Theory of extracting sea-sky-line
其中,有L1的表达式:
(1)
另外,因为弱小目标距离导弹较远,所以可近似认为海天线视线与目标视线重合,θ极小,进而有h的表达式:
(2)
则θ可由下式计算:
(3)
由上述公式即可确定目标与海天线的相对位置,进而缩小目标的搜索范围,筛除一部分干扰。
1.3 目标运动特征识别
通过惯导信息估算目标视线角速度的原理如图3所示,某时刻导弹速度为V1,目标速度为V2,目标相对导弹的位置可以用向量l表示。在极短的一瞬间内,可近似认为导弹和目标做匀速直线运动,因此上述情况可等效为导弹静止、目标相对导弹以V=V2-V1的速度运动。则当前时刻导弹对目标的视线角速度为
(4)
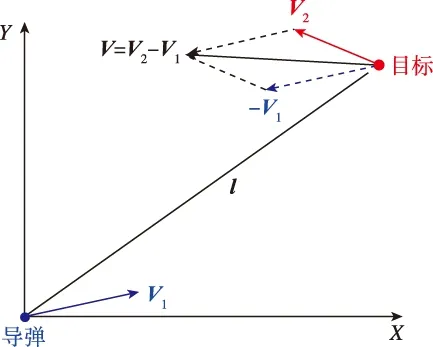
(a) 目标相对导弹的速度

(b) 速度的分解计算图3 目标视线角速度的计算Fig.3 The calculation of target angular velocity
由式(4)计算出ω后,将其与红外系统提取的各个候选目标的实际视线角速度比较,筛选出目标。红外信息中提取的海天线及潜在目标视线角均是相对于图像坐标系的,需要转换到惯性坐标系下才能与惯导信息进行融合或比较。对于凝视成像红外导引头,只要引入光轴指向和导弹空间位置,即可将图像坐标系下的视线角转换到惯性系下,其中光轴指向可由装在框架上的微机械陀螺给出,导弹空间位置由惯导信息给出。具体算法可以参考刘会文等人[13]给出的视线角速度提取方法。
2 仿真验证
2.1 实验概述
本节基于仿真数据,进行下面两方面的工作:
(1)验证目标检测方法的可行性:首先,在导弹运动中,目标应当远离海天线而非停留在其附近,否则灰度较高的海天线将会严重影响目标的辨识;其次,目标与干扰的视线角速度差值应处于较为显著的水平。
(2)分析特定机动方式下目标相对背景的运动特性:首先,目标是处于空背景还是海背景上;其次,目标与干扰的视线角速度变化过程存在哪些不同的特征。
2.2 实验参数
本次实验中目标的飞行高度为15m,水平方向的初始截距为1000m,与导弹的初始距离为6765m。为了对比目标和背景中干扰的运动特征,实验中还设定了6个静止的干扰点,其位置信息如表1所示。实验过程中目标、导弹和干扰点的位置如图4所示,其中导弹从坐标系原点发射,目标以120m/s的速度沿X轴运动。

表1 干扰的位置Tab.1 Positions of interferences
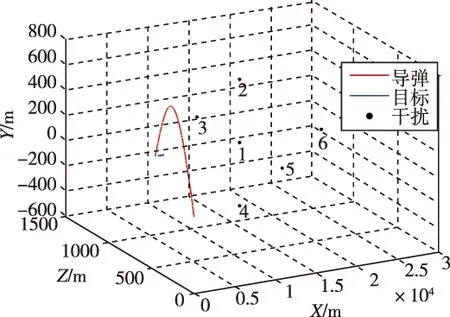
图4 导弹与目标位置Fig.4 Positions of the missile and target
2.3 海天线提取
根据式(3)分析了导弹飞行过程中目标与海天线的相对位置变化情况,结果如图5所示,其中目标与海天线视线夹角为正代表目标位于空背景上,夹角为负代表目标位于海背景上。由于导弹在竖直方向上先爬升后下降,因此实验中目标先位于空背景上,然后再逐渐移动到海背景上。

图5 海天线提取结果Fig.5 Result of extracting sea-sky-line
海天线处的背景灰度存在突变,当目标位于海天线附近时会给大多数基于阈值的图像分割算法造成困难,影响视线角速度的计算。因此在检测目标时通常希望它能快速通过海天线,不要在海天线上下停留或徘徊。设海天线的影响范围为其上下0.1°的区域,则由图可知目标会在0.5s内快速穿过该区域,并于第1.1s后完全进入海背景中,不会再度返回或接近海天线。这表明海天线对目标辨识的影响有限,通过提取海天线来划分图像的方法是可行的。
2.4 目标运动特征分析
根据式(4)可分析出导弹在飞行过程中对目标和干扰的视线角速度变化情况,如图6(a)所示。在拦截过程的前段,目标的视线角速度始终大于干扰,且两者间的差值随着时间不断增大;在前7s内目标与干扰的视线角速度差值始终大于0.15(°)/s,属于较为显著的水平。
除了总的视线角速度,还可以通过其在俯仰和偏航方向上的分量筛选目标。如图6(b)所示,目标和干扰的俯仰视线角速度方向相同,两者间的差值从0开始持续增大并于第0.1s后超过0.05(°)/s,第0.2s后超过0.1(°)/s,期间目标的视线角速度绝对值始终大于干扰。如图6(c)所示,导弹发射时对目标和干扰的偏航视线角速度方向相反,随后干扰的视线角速度持续增大,而目标的视线角速度绝对值则先减小后增加,期间在约第3s时降为零并转换到与干扰相同的方向。这种变化过程导致目标和干扰的偏航视线角速度值差值较小,但仍然能够保持在大于0.1(°)/s的较显著水平上。

(a)目标和背景干扰的合成视线角速度变化

(b)目标和背景干扰的俯仰视线角速度变化

(c)目标和背景干扰的偏航视线角速度变化图6 目标和背景干扰在视场中的运动特征Fig.6 The movement characteristics of target and background interferences in the view field
因此,合成与俯仰方向的视线角速度差值非常显著且具有近似的变化过程,偏航视线角速度的差值较小且变化过程与其它分量有明显不同。俯仰和偏航视线角速度之所以有迥异的变化方式,可能和导弹的机动方式有关,导弹在竖直方向上先爬升后下降,而在偏航方向上则没有明显的机动,因此加强导弹的机动可以增加弹目间的相对速度,进而增加导弹对目标和干扰的视线角速度差值。
3 结 论
结合上述理论推导过程与仿真验证结果,得到以下结论:
(1)从导弹发射时刻起,目标从视场中的空背景逐渐移动到海背景上,期间只穿越一次海天线且用时极短。因此通过提取海天线缩小目标识别范围的方法是可行的。
(2)导弹在飞行过程中,对目标与干扰的视线角速度差值始终处于较显著的水平,因此通过视线角速度筛除干扰的方法是可行的。
(3)目标在空背景的停留时间、目标穿过海天线的速度、目标与干扰的视线角速度差值是决定抗干扰效果的重要指标,因此在后续研究中应分析大量的仿真试验数据,研究这些指标与目标的高度、截距、速度以及弹目初始距离等条件参数间是否存在量化关系。
(4)合成视线角速度及其在两个方向上的分量都可以用于筛选目标,在决策过程中应当优先选择合成视线角速度和导弹机动量较大的方向上的分量。