机器视觉在工业机器人中的应用研究
2020-03-02宋博仕傅继军马伟俊
宋博仕 傅继军 马伟俊

摘 要:工业机器人在智能制造中有着广泛的应用,其中视觉技术极大的扩展了工业机器人的灵活性,提高了生产效率。文中基于ABB工业垂直串联六关节机器人、工业相机以及PLC的硬件基础,介绍工业机器人的基本组成、视觉系统工作原理及系统各单元的通信方式,针对工业机器人模拟加工汽车轮毂的程序进行设计,结果表明,工业机器人与视觉系统的协作使用在加工制造中更具灵活性。本文为工业机器人与视觉系统的集成设计提供一种有效的思路和方法,具有一定的教学和工程应用价值。
关键词:工业机器人 机器视觉 系统集成 垂直串联六关节
中图分类号:TP242.2 文献标识码:A 文章编号:1674-098X(2020)08(c)-0039-03
Abstract: Industrial robots have a wide range of applications in intelligent manufacturing. Among them, vision technology greatly expands the flexibility of industrial robots and improves production efficiency. Based on the hardware foundation of ABB industrial vertical six-joint robot, industrial camera and PLC, the article introduces the basic composition of the industrial robot, the working principle of the visual system and the communication method of each unit of the system. The program of simulating machining automobile wheel hub by industrial robot is designed. It shows that the collaborative use of industrial robots and vision systems is more flexible in manufacturing. This paper industry provides an effective idea and method for the integrated design of robot and vision system, which has certain teaching and engineering application value.
Key Words: Industrial robot; Machine vision; System integration; Vertical series six joints
隨着经济全球化浪浪潮及中国制造业的快速发展,劳动力成本越来越高,我国劳动密集型产业面临转型升级的挑战,通过工业机器人的广泛应用,可有效降低企业生产成本,增加企业竞争力[1]。工业机器人具有工作效率高、稳定可靠、重复精度高、可适应不同恶劣环境等优点[2]。但早期的检测技术日益无法满足工业需求,通过工业相机与工业机器人协同作业,模拟人眼视觉功能,依据视觉结果控制机器人为生产制造带来无限可能[3]。本文中利用机器视觉系统与工业机器人协同作业[4-6],对汽车轮毂进行模拟加工,规划加工路径,工业机器人完成工件的取料、搬运,机器人根据视觉系统的识别结果,选择不同的工艺流程。
1 系统的组成和工作原理
工业机器人系统由工业机器人、视觉单元、仓储单元、数控单元、打磨单元、分拣单元组成。其中工业机器人采用瑞士ABB公司IRB120型机器人,该机器人有6个自由度,每个关节采用交流伺服电机驱动,负载质量3kg,重复定位精度0.01mm,机器人底座固定在可移动基座上,通过PLC控制外部轴移动机器人底座到达不同位置,增加机器人的作业空间。
视觉单元由omorn公司CCD相机、欧姆龙FH-L550处理器、环形光源组成,其中镜头采用日本 COMPUTAR公司的 M0814-MP2型号的定焦镜头,焦距8mm,最大成像尺寸8.8mm×6.6mm;光源采用CCS公司的LED环形光源,具有响应时间快,可获得高品质、高对比度图像等优点。
根据工艺要求,工业机器人、视觉系统、PLC控制系统协同作业对汽车轮毂进行模拟加工,视觉单元对6自由度工业机器人抓取的汽车轮毂特征进行识别,并且把被识别的物体的颜色,二维码等特征信息通过工业以太网传送至工业机器人控制器,机器人根据判别结果选择执行对应的工艺流程,实现取夹具、取工件、视觉检测、打磨、数控加工、分拣、放夹具、放工件作业。
2 视觉系统工作原理
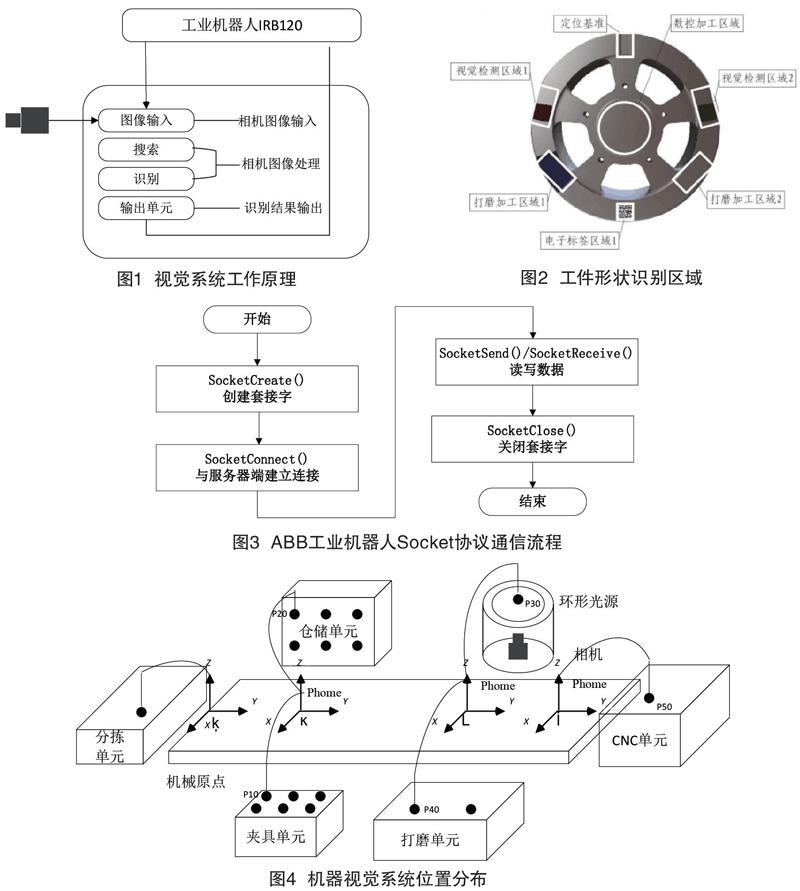
视觉系统是一种非接触式光学传感系统,如图1所示,工业机器人搬运工件到了环形led光源上方,机器人通过程序触发相机拍照采集图像,相机控制器将采集的图像转换为数字图像对其处理[4],在图2中,电子标签区域1中识别二维码、在视觉检测区域1和2中识别颜色,最后通过以太网将判别结果发送至工业机人控制单元。根据零件颜色标签及二维码标签,在相机控制器同一场景组下配置两种不同场景分别检测颜色和二维码,输出检测结果,机器人与视觉系统通信获取识别结果。
3 机器人程序设计
(1)系统通信。
ABB机器人与相机控制器是基于无协议socket通信,Socket协议位于TCP/IP传输层之上,信息主要由5部分组成:协议、本地IP地址、本地端口號、远程IP地址、远程IP端口号[5]。其中以相机控制器为服务器,ABB机器人为客户端,通讯流程如图3所示。
ABB机器人控制器外部扩展IO模块、打磨单元、分拣单元、仓储单元以及CNC单元的扩展IO模块是基于西门子S-1200PLC分布式控制,PLC通过以太网与各模块I/O设备通信进行数据交换,监控各模块运行状态,实现本地分布式运行。
(2)空间轨迹规划。
模拟轮毂加工工艺步骤如下,依据工业机器人系统位置关系如图4所示,可将机器人作业任务分解为机器人作业初始化,取夹具、从仓储单元取工件、视觉检测、打磨作业、数控加工等独立的动作,并将最终加工完的零件送至分拣单元或仓储单元。
ABB机器人程序采用模块化设计,根据作业任务集中管理,将程序分为几个模块(见表1)。
4 结语
本文模拟汽车轮毂工件进行加工,基于机器视觉软件和ABB Rotbotstudio软件进行视觉系统配置与工业机器人编程,介绍基于机器视觉的工业机器人系统的组成,分析各单元完成的功能,机器视觉的工作原理、系统通信方式,最终对加工程序进行整体规划,并控制机器人完成取料、视觉检测,实现汽车轮毂的精加工,满足教学和工业生产需求,对工业机器人与视觉单元的集成有重要的参考意义,但对生产线上移动工件的视觉技术与工业机器人协同作业未进行试验,在后续工作中会进一步展开。
参考文献
[1] 计时鸣,黄希欢.工业机器人技术的发展与应用综述[J].机电工程,2015,32(1):1-13.
[2] 杨代明.探讨工业机器人在现代生产中的应用[J].科技展望,2017,27(2):144.
[3] 何鹏,潘鑫,汪雪聪,等.基于机器视觉的SCARA机器人的应用[J].机械工程师,2016(10):72-76.
[4] 徐建明,潘湘飞.基于Socket通信的工业机器人监控 系统研究[J].计算机测量与控制,2017,25(7):70,73.
[5] 李伯平.机器视觉的双工业机器人协调作业分析研究[J].电子元器件与信息技术,2018(9):4-6,10.
[6] 卢俊华,朱海飞,梁经伦,等.双足爬壁机器人三维壁面环境全局路径规划[J].哈尔滨工业大学学报,2020,52(1):148-155.
