一种快速收敛的固定时间非奇异终端滑模控制方法
2020-03-01蔡远利邓逸凡
田 野,蔡远利,邓逸凡
(西安交通大学 电信学部 自动化科学与工程学院,西安 710049)
滑模控制(Sliding Mode Control)是一种非线性控制方法,它通过使用非连续的控制信号来调节系统的动态性能,驱使系统状态量在指定的滑模面上运动。其系统响应分为趋近模态[1]和滑动模态,通过合理设计可以使系统具有良好的稳定性和动态性能。与其他非线性控制方法相比,滑模控制方法因其形式简单、对系统参数变化的低敏感性以及对外部干扰的强鲁棒性被广泛研究并应用于众多非线性系统的控制问题中,包括飞行器控制[2]、制导律设计[3]、容错控制[4]和电力系统等。
传统线性滑模控制方法基于线性超平面构造滑模面,在满足李雅普诺夫稳定理论的条件下控制系统趋于平衡,但这种方式只能保证系统的全局渐近稳定。为了使系统状态能够在有限时间快速收敛,基于有限时间稳定概念提出了终端滑模控制(Terminal Sliding Mode Control)方法,在滑模面运动阶段通过采用非线性超平面来实现快速有限时间收敛。然而,由于标准终端滑模中含有负指数幂次项,在某些系统状态下会出现奇异问题。Yang[5]构建了非奇异快速终端滑模,使得系统状态在全论域内都为有限时间收敛。各终端滑模方法均为有限时间控制下的方法,并未给出收敛时间的明确估计。有限时间稳定理论的关键问题之一是对收敛时间的估计,它一般为系统初始条件的函数,不同的初始状态值会得到不同的收敛时间。由于实际系统的初始条件可能难以预先精确获得,从而在某些情况下收敛时间无法准确估算,限制了其应用。
在有限时间稳定的基础上,Polyakov[6]进一步提出了固定时间收敛的概念。与有限时间收敛相比,固定时间收敛理论可以在系统收敛时得到一个不依赖于系统初始条件的收敛时间上界。同时,研究了滑模控制系统固定时间稳定性分析的数学方法,提出了用于稳定性分析和收敛时间估计的广义Lyapunov 定理。Polyakov[7]讨论了含有非线性不确定性的多输入多输出系统的有限时间和固定时间稳定的控制器设计问题。Zuo[8]针对一类二阶非线性系统提出了一种固定时间收敛的终端滑模控制方法,并应用于多智能体系统的协同控制中[9],但是该方法在系统状态某些区域存在奇异性问题。Li[10]基于文献[7-9]设计了具有快速固定时间收敛特性的非奇异终端滑模。然而,Zuo[8]设计的固定时间系统及终端滑模收敛时间并不是最优的,且所设计的滑模面结构较复杂,不利于实际应用。Ni[11]提出了一种固定时间非奇异终端滑模方法,通过引入饱和函数来避免奇异问题,但所设计的方法未考虑外部干扰对控制性能的影响。
基于以上讨论,针对已有方法存在的不足,本文结合固定时间稳定理论和终端滑模控制理论,设计了一种新型的固定时间非奇异终端滑模控制方法。主要创新点在于:1)对一类含匹配扰动的二阶非线性系统,基于固定时间稳定理论提出了一种新型的固定时间收敛系统,其收敛速度快于已有文献[6,8-11]中的固定时间收敛系统,收敛时间的对比验证了所提出结论的正确性。2)基于提出的固定时间收敛系统,构造了一种新型的快速收敛固定时间非奇异终端滑模。所提出的方法避免了奇异现象,具有与初始状态无关收敛时间上界,可由设计参数预先设定。与已有的几种典型固定时间滑模控制方法相比,所设计的方法收敛速度更快,削弱了之前固定时间滑模存在的抖振,所需控制能量更小且控制曲线平滑,适于实际应用。最后将该方法应用于单级倒立摆和制导系统中进行了仿真分析,验证了所提出方法的有效性和优越性。
1 问题描述
考虑如下非线性系统:
其中x∈Rn为系统状态量,F(t,x):R+×D→Rn为连续非线性函数,D为包含原点的开区域。系统(1)的解定义在Filippov 意义下,给定初始时间t0和初始状态x0。
定义1[11]对于系统(1),若1)原点为渐近稳定平衡点,且存在原点的开邻域N⊆D;2)对所有x(0) ∈N { 0},存在正定函数T(x0):N→R,则原点是有限时间收敛平衡点。同时,原点的有限时间稳定意味着原点的渐进稳定性。当N=D=Rn时,原点为全局有限时间稳定的。
定义1 中的收敛时间T为系统初始状态x0的函数,因此有限时间收敛依赖于系统的初始状态。在此基础上,Polyakov[6]提出了固定时间稳定的概念,相对于有限时间稳定系统,固定时间稳定系统可以保证系统的收敛时间与系统初始条件无关。
定义2[6]若系统(1)全局有限时间稳定,且收敛时间函数T(x0)存在实数上界Tmax>0,即对任意∀x0∈Rn,有T(x0)≤Tmax,则原点为固定时间收敛平衡点。
考虑一类具有匹配扰动的二阶非线性系统

式中x=[x1,x2]T∈R2为系统状态,f和b≠ 0为已知非线性光滑函数,u∈R为控制输入,d为外部扰动。
假设1假设外部扰动d有界,对于x∈R2及t≥0,存在常数D>0,满足
论文的目标是设计固定时间终端滑模控制律,使系统状态x跟踪参考模态,从而实现对输入信号的期望响应。
2 固定时间非奇异终端滑模控制
2.1 新型固定时间收敛系统
引理1[7]考虑一类非线性系统


控制系统收敛时间上界可通过选择不同的参数l1、l2、m1、m2来确定而无需依赖系统初始状态。
文献[7-9]基于系统(4)设计了固定时间滑模面及控制律并取得了良好的控制效果,但是该系统的收敛速度仍可有改进之处。基于以上讨论,我们构造了一种新型的固定时间收敛系统,其收敛时间小于系统(4)的收敛时间Tf。
定理1对于一类非线性系统


证明:式(6)可写为

当>1时,令y=1+ln;当≤1时,令y=。则式(8)可化为

因此,可通过求解式(9)得到系统的收敛时间上界。
即

注1与引理1 给出的收敛时间Tf相比,由于及因此系统(6)的收敛速率快于系统(4)的收敛速率。在实际二阶非线性系统中,z和z˙可代表角度和角速度等被控参数。系统(6)中使用了变指数幂次项 signk1z和 signk2z代替了(4)中的常值幂次项,>1时,signk1z项转换为signm1z形式,由于m1>1,该项对系统收敛速度影响较大,使系统状态以较快速度趋向平衡点;≤1时,signk2z项转换为 signm2z形式,由于 1/ 2<m<1,该
2项起主导作用,保证了此区域内收敛的快速性。由上可知,相对于常值幂次项,变指数幂次项可在不同阶段下进行自适应的调节,使系统具有全局快速固定时间收敛特性。
2.2 固定时间非奇异终端滑模设计
针对非线性系统(3),文献[5]提出的传统快速终端滑模如下:


其中α>0,β>0,γ1>1,0<γ2<1。
由文献[5]可知终端滑模(13)具有快速有限时间收敛特性。进一步地,应用引理1 可得该终端滑模具有固定收敛时间上界

其中

然而,通过对该滑模面及控制律分析可知,式(14)中含有负幂次项,当x1=0,x2≠ 0时,会导致奇异现象。
为避免奇异并获得较快的收敛速度,基于系统(13)的设计思想,结合设计的固定时间收敛系统(6),构造了一种新型的快速收敛固定时间非奇异终端滑模
其中,
对s求导可得

选择滑模趋近律

其中
控制律设计为

经分析可知,滑模面(16)及导数本质上连续。1)≥η时,滑模面转化为与式(13)相似的结构,具有类似的收敛特性。系统状态距平衡点较远时,α1s ignk1x1起主导作用,保证了快速收敛;当系统状态接近原点时,β1signk2x1起主导作用,系统在固定时间内稳定。系统在整个动态过程中保持了较快的收敛速度。2)在原点一个很小的邻域<η内,转化为二次函数形式的一般滑模滑模面及导数(19)不含负指数幂次项,避免了奇异发生。
定理2对于非线性二阶系统(3),使用本文设计的固定时间非奇异终端滑模(16),选择控制律(21),则系统状态x1,x2可在固定时间内到达平衡点,收敛时间具有仅与设计参数相关的上界

其中
证明,选取Lyapunov 函数为

对式(23)求导,同时结合(3)和(19)可得
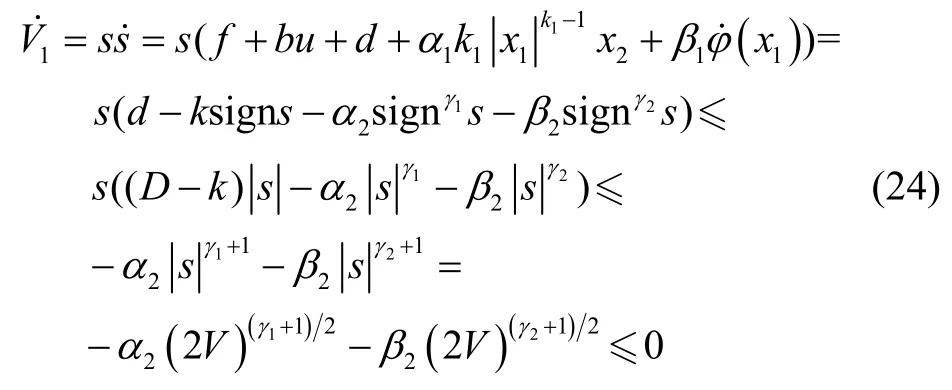
≥1时,

<1时,

该固定时间滑模面满足李雅普诺夫稳定性理论。结合定理1 可得,系统状态可在固定时间t1内到达滑模面s=0。
由上分析可知,系统状态可由任意位置到达滑模面s=0。随后沿着滑模面运动至平衡点的一个极小邻域内,理想的滑动模态满足如下方程

考虑如下李雅普诺夫函数

当≥η时,由式(17)可得滑模面为

对式(29)求导,结合(30)可得
系统状态在固定时间t2内收敛
由式(31)及(32)可得,状态变量x1在固定时间内进入区间<η,并满足

可得系统(3)的收敛时间为T<Tmax=T1+T2。
当<η时,可得滑模面为

可得

类似地,可得系统状态在时间T内收敛。
综上,收敛时间为T<Tmax=T1+T2。
注2系统收敛时间上界取决于所设计的滑模面参数α1、β1、m1、m2、α2、β2、n1、n2和η,而与系统初始状态无关。在实际使用中,可根据对收敛快速性和稳态跟踪精度的权衡来合理选择设计参数。
注3控制律(21)中符号函数 sign(s)的存在可能会引起抖振,为削弱抖振现象,使用如下连续函数代替符号函数。

λ取值越大越接近切换函数,通过选择合适的λ,可以有效削弱抖振并减小稳态误差。
3 仿真及分析
为了验证所设计固定时间非奇异终端滑模的可行性和优越性,进行如下三种仿真。
3.1 不同滑模参数的对比仿真
为分析不同参数选取对所设计固定时间滑模收敛特性的影响,我们在相同的初始条件x1(0)=1下分别选取四种不同的滑模参数进行仿真,并进行对比分析。
各参数分别为:
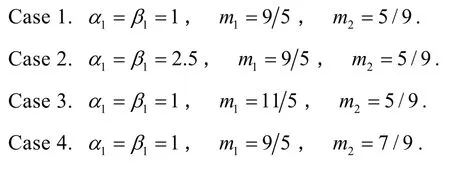
图1给出了不同滑模参数下的收敛速度对比。从Case 1 和Case 2 的曲线可以看出,当α1,β1增大时,收敛时间变短。比较Case 1 和Case 4 的结果可知,随着m2增大,收敛速度变慢。从Case 1 和Case 3 的曲线可以看出,不同m1取值下的收敛曲线基本无变化,所设计的滑模控制方法对m2变化的灵敏度远大于m1。可通过增大α1,β1和减小m2提高收敛速度。
从改变参数的仿真结果对比可以得知,式(21)中的各可调参数,其选择应该兼顾考虑收敛速度、误差、状态曲线平滑程度和能量消耗等因素,以达到较优的控制效果。其中,α1和β1增大可以提高系统收敛速度,但是取值远大于1 时会导致跟踪曲线的不平滑和误差变大,使系统失稳,控制性能下降;同时,更快的收敛速度要求更大的控制能量。设计的滑模控制方法对m2变化的敏感度大于m1,取值应满足m1>1,1/ 2<m2<1。m1可在靠近1 的范围取值,取值过大会导致系统失稳;m2应在取值范围内尽可能的小,满足快速性的要求,但不能过分靠近取值下限,否则会使系统状态曲线波动过大。α2,β2,n1和n2为趋近阶段滑模面参数,其取值原则类似于上述。在控制律中引入ρ(λ,s)函数代替符号函数 sign(s)用以削弱抖振,其中可调参数λ取值越大越接近切换函数,本例选择λ=100得到较好的效果。η为切换函数参数,取一个极小的正数,本例选择0.01。在滑模面设计中可综合以上以得到较优的控制效果。
图1 不同滑模参数下的收敛速度对比Fig.1 Convergence rate under different sliding surface parameters
3.2 不同固定时间滑模方法的对比仿真
倒立摆(SIP)是一种非线性、强耦合的系统,可通过倒立摆仿真,分析控制理论中系统稳定性、可控性、鲁棒性、随动跟踪等关键问题。因此,基于倒立摆系统对几种典型的固定时间滑模控制方法进行对比,以检验所设计方法的有效性和优越性。动态模型如下
基于设计的快速固定时间非奇异终端滑模,我们构造了固定时间控制律来解决SIP 的跟踪控制问题。定义跟踪误差e1=x1-x1d,e2=x2-,可得
相应的快速固定时间非奇异终端滑模面为

SIP 固定时间控制律为

为了验证所设计控制律的鲁棒性,选择有界外部扰动d(x1,x2)=sin(10x1)+cos(x2)。SIP 期望轨迹为x1d(t)=sin(0.5πt),初始状态x1(0)=1,x2(0)=0.5。
使用3 种典型的固定时间滑模控制律进行仿真对比,分别为1) Polyakov[6],2) Zuo[8],3) Ni[11]。
Polyakov[8]设计的固定时间滑模控制律为
使用的滑模面为

对于式(41)(42),原文献中已合理地选择参数以达到良好的控制效果;为保证比较的公平性,在对比中直接使用原文的参数值,其收敛时间上界为8s。
Zuo[11]设计的固定时间滑模控制律为
使用的滑模面为

类似地,滑模参数使用原文献中的仿真参数,其收敛时间上界为6.142 s。
Ni[11]设计的固定时间滑模控制律为
使用的滑模面为


同理,滑模参数使用原文献中的仿真参数,其收敛时间上界为5.63 s。
所设计的滑模面(39)及控制律(40)的参数选择为α1=β1=1,α2=β2=1,m1=9/ 5,m 2=5/ 9,n1=9 /5,n2=5 /9,η=0.01及λ=100。计算得其收敛时间上界为4.881 s。
图2给出了4 种固定时间滑模控制律的跟踪误差收敛时间对比,从图2可以看出,各控制律在给定的时变扰动下均能保证良好的控制性能。同时,所设计的控制律(40)下的收敛时间最短,约1.49 s,控制律(40)下的瞬态响应也是最快的。因此,所设计的控制律较其余三种具有更优的响应速度和收敛速度。图3为不同控制律下的相平面轨迹,可以看出本文所设计方法的控制效果最佳。图4给出了控制输入曲线。本文所提出方法下的控制输入曲线光滑无抖振,且控制的最大振幅明显小于其余方法,证明了其控制效果较其他三种更优。
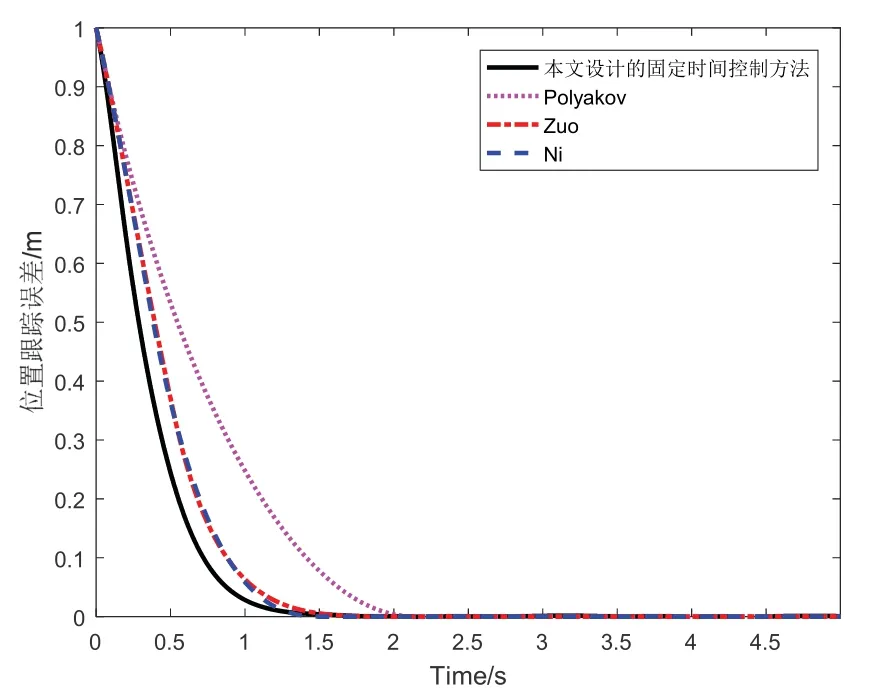
图2 不同固定时间控制律下跟踪误差收敛时间对比Fig.2 Tracking error of each fixed-time controller
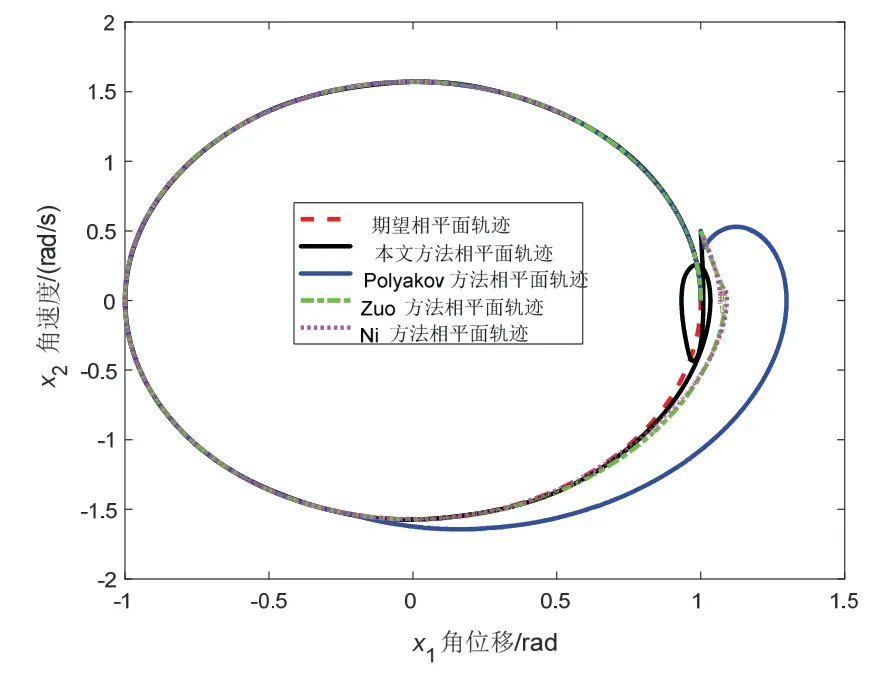
图3 不同固定时间控制律下的相平面曲线Fig.3 Phase portraits of each fixed-time controller

图4 不同固定时间控制律下的控制输入Fig.4 Control inputs of each fixed-time controller
为了更有效地比较不同控制输入的控制效果和能量消耗,我们使用以下方法进行评估:控制的性能可以通过输入u(t)的总变化量(total variation/TV)进行评估[13],它可以体现控制输入信号的平滑度,其表达式如下

此外,控制能耗可以通过所需控制输入信号的2 范数(2-norm)进行计算。对于所设计的固定时间控制方法,为了获得理想的控制性能,控制能量应尽可能小。
表1中列出了控制效果的对比,可以看出本文设计的控制律平滑度较好,具有相对较小的输入变化波动,并以最小的控制能量实现了较优的控制性能。
从以上仿真结果和分析可以看出,所设计控制器可对含有匹配时变扰动的二阶非线性系统进行有效的控制。与现有的典型固定时间滑模控制方法相比,具有更快的收敛速度和更佳的稳态品质,以较小的控制能量实现了良好的控制性能,并避免了奇异问题。所设计的控制律是连续的,没有抖振现象,保证了快速收敛和相对较高的精度。
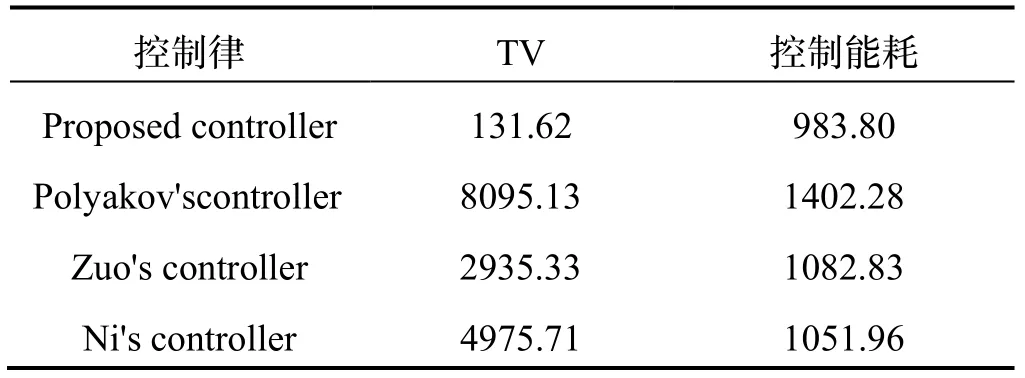
表1 控制效果对比Tab.1 Input performance comparison for the four controllers
3.3 固定时间收敛制导仿真
末制导阶段是导弹制导过程的重要部分,为了达到理想的毁伤效果,要求导弹能够在期望时间内以设定的碰撞角度击中目标。
为了验证所设计固定时间非奇异终端滑模面的有效性,针对导弹拦截机动目标问题,设计三维固定时间末制导律,该制导律能够确保弹目视线角及角速率在固定时间内收敛,满足碰撞角约束的要求。与传统的有限时间收敛滑模制导律相比,该制导律收敛时间独立于制导初始条件,可以根据制导要求预先给定。
三维空间拦截机动目标的相对运动关系见图5。
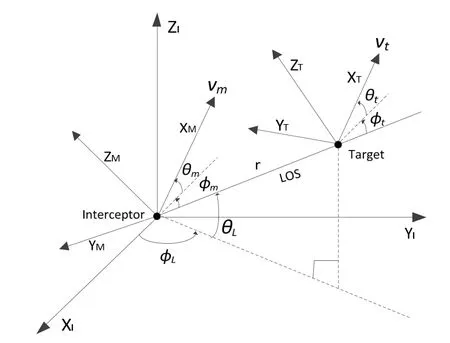
图5 导弹-目标三维相对运动学关系Fig.5 3D interceptor-target geometry
其中vm,vt和r分别表示拦截弹和目标的速度及弹目相对距离,飞行器速度方向由视线坐标系下的弹道倾角θm,θt与弹道偏角φm,φt定义。θL和φL为俯仰视线角和偏航视线角,aym,azm,ayt,azt分别为拦截弹和目标弹的侧向加速度。
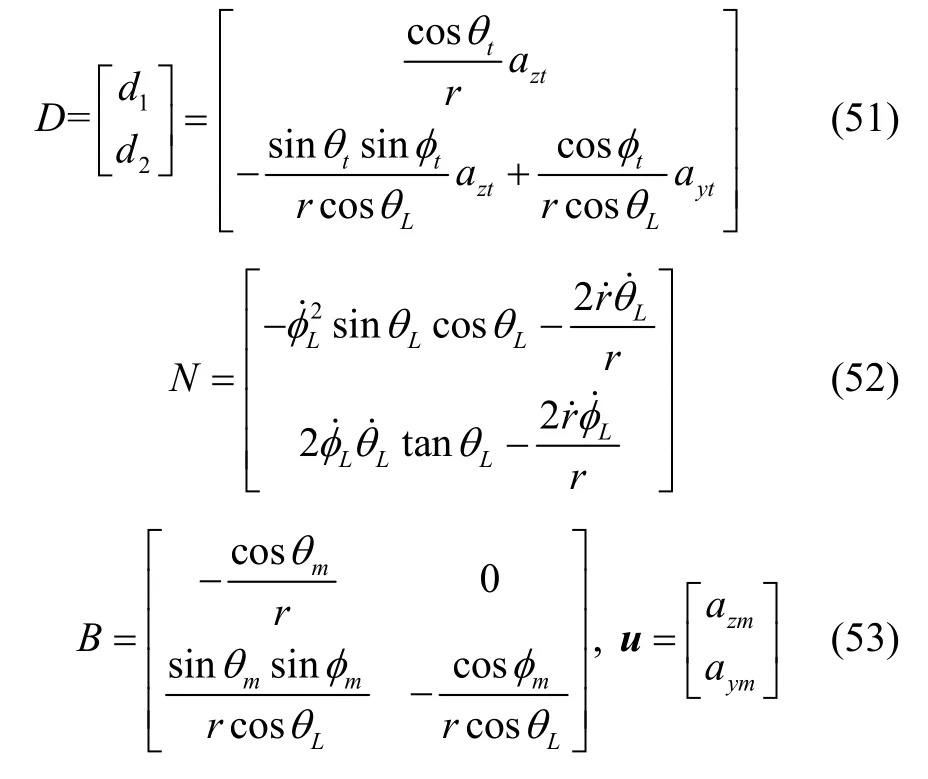
使用视线角(line of sight LOS)的二阶动态方程来描述导弹-目标相对运动关系,其形式为
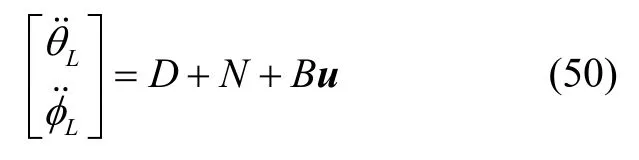
式中
基于式(16)设计固定时间终端滑模面

固定时间制导律设计为:

其中=δQs为自适应律,(0)>0,(0)>0,常值系数δ>1,,Q=diag (sign (s1),sign (s2))。
仿真初始条件如表2所示。选择导弹初始偏航视线角φm(0)=5°,使用不同的导弹初始俯仰视线角θm(0)进行仿真对比,分别为5 °,15 °和30 °。导弹的过载上限为aym_max=azm_max=40g。假设初始时刻起目标做匀速直线运动,在从t=4s开始持续地转弯机动,侧向机动加速度为ayt=azt=30m/s2。
制导律(55)中的参数选择为:m1=n1=9/7,m2=n2=7/9,α1=β1=0.8,α2=200,β2=800,η=0.01,δ1=δ2=100。由设计参数计算得收敛时间上界为T=7.553s。
表2 仿真初始条件Tab.2 Initial parameters for the simulation
图6(a)-(c)给出在不同初始条件下拦截仿真参数曲线图。从图6(a)可以看出,导弹在不同的初始俯仰视线角下均成功拦截了目标。图6(b)(c)表明虽然仿真初始角度不同,但各视线角及视线角速率均在所设定的时间上界内收敛至零。图6(d)表明滑模面在不同的初始俯仰视线角下都能够在固定时间上界内快速收敛到0。图中所示的各曲线较平滑,收敛速度快,具有较好的控制性能,验证了所设计固定时间非奇异终端滑模面的正确性及有效性。
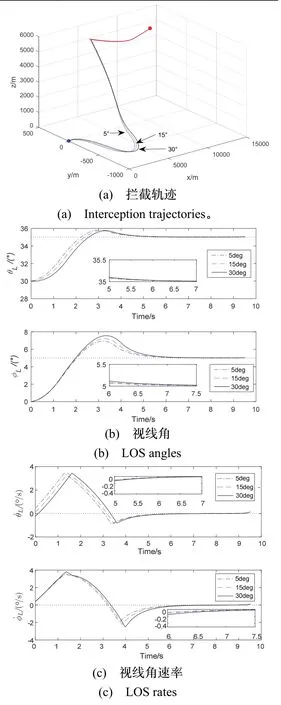
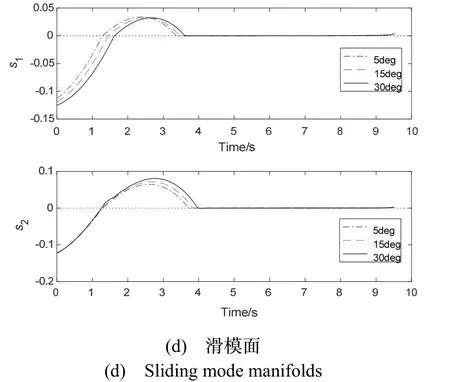
图6 不同初始俯仰视线角下的拦截仿真Fig.6 Interception with different initial elevation angles under
4 结 论
针对一类具有匹配不确定性的二阶非线性系统,设计了一种新型快速收敛的固定时间非奇异终端滑模方法。首先,提出了一类新型固定时间收敛系统,基于该系统构造了快速固定时间非奇异终端滑模,并给出了收敛时间上界。与传统有限时间收敛终端滑模不同,本文所设计的终端滑模收敛时间与系统初始状态无关,可以通过设计参数进行预先估算。将所设计方法用于两个典型的非线性控制问题,验证了所设计方法的有效性和优越性。本文建立的固定时间滑模控制方法收敛速度较快,能量消耗低,且无抖振现象,具有良好的控制品质,方便了实际应用。将结果扩展到高阶非线性系统,是下一步值得研究的工作。
