面向商业航天的基于新型固态谐振陀螺的敏感器设计
2020-03-01李建朋付明睿何树悦乔永昌
李建朋,夏 悦,付明睿,何树悦,乔永昌
(1.北京控制工程研究所,北京 100190;2.空间智能控制技术重点实验室,北京 100190;3.北京轩宇空间科技有限公司,北京 100190)
面对商业航天市场的快速发展,特别是以美国SpaceX 公司的星链计划(Starlink)为代表的商业航天项目的兴起,对用于卫星姿态测量的惯性姿态敏感器的需求日益增加。面向商业航天的惯性姿态敏感器和传统宇航单机产品区别较大,商业航天市场要求惯性姿态敏感器首先具备低成本、小型化的基本特性,其次单机产品需要具备姿态控制系统所需要的性能和空间应用所要求的环境适应性,例如具备一定的抗辐照能力,最后单机产品还要求本质上具备高可靠和长寿命的潜质。
商业航天市场具有一定的特殊性,与传统宇航市场相比,商业航天市场对惯性姿态敏感器的需求巨大,并要求低成本、小型化;与军用、民用市场相比,商业航天市场对惯性姿态敏感器的可靠性和抗辐照特性有较严格的要求。因此,针对面向商业航天市场的惯性姿态敏感器设计,作者认为应该遵循以下原则:
(1) 低成本设计
商业航天市场的价格敏感性决定面向商业航天市场的惯性姿态敏感器产品必须具备成本优势。低成本的惯性姿态敏感器产品不应该是机械式的降低每个部件的成本或者牺牲产品可靠性等手段来达到成本降低的目的,而应该是以设计为抓手,通过改进设计和选择合适的方案来降低成本。例如,本文研究的新型固态谐振陀螺产品,将从陀螺的选择和控制方案的设计两方面综合实现低成本设计。
(2) 元器件选择
商业航天市场对单机产品可靠性和抗辐照能力的要求,决定面向商业航天市场的单机产品的元器件不能随意选取商用元器件,而应该有所取舍。虽然元器件在产品成本中占比较大,但是也不能为了降低成本而全面降低元器件的等级,应该按重要程度分级降级使用。本文研究的新型固态谐振陀螺惯性姿态敏感器产品采用元器件分级原则:核心处理器、电源和对外接口芯片选用高等级的器件,其他的元器件选用普军级或工业级器件,但是均有辐照指标。
(3) 批量化模式
与其他商品一样,以设备自动化代替人员密集实现批量化的生产模式必然降低产品的成本,但是单机产品本身的设计也必须是面向批量化生产模式。本文将采用易于实现批量化生产的数字控制方案,提出的自适应起振及自测试方法均是面向批量化的生产方式。
(4) 最优化SWaP
陀螺的C-SWaP(Cost-Size Weight and Power)特性是决定惯性姿态敏感器产品市场竞争力的本质因素,选取合适的陀螺是敏感器产品的基础。本文将提到的新型固态谐振陀螺具有极好的C-SWaP 特性,应该是面向商业航天市场的优选方案。
综上所述,针对商业航天的特殊需求,本文将首先介绍一种新型固态谐振陀螺,该陀螺具备极好的C-SWaP(Cost-Size Weight and Power)特性,原理上具有高可靠、长寿命的基本特性,非常适合商业航天应用;其次,针对该新型固态谐振陀螺的控制问题以及综合考虑商业航天的特点,开展一种面向商业航天的全数字控制技术研究,包含3 种关键的控制与测试方法;然后,以研究的控制方法为基础,设计基于新型固态谐振陀螺的惯性姿态敏感器,并对其进行测试评估。
1 新型固态谐振陀螺
作为与半球谐振陀螺相同技术型谱的金属筒状科氏振动陀螺(M-CVG)是一种新型全固态谐振陀螺,具有精度体积比较高、低成本、大动态、长寿命等特点[1-2],金属筒状科氏振动陀螺(下文简称新型固态谐振陀螺)是半球谐振陀螺技术在低成本、小型化、批量化方向发展的产物。
半球谐振陀螺是目前性能最高的轴对称壳谐振陀螺,已经广泛应用于卫星的稳定控制、航天器导航、深海导航等领域[3-4]。然而,其高昂的价格不满足商业航天领域低成本的需求。半球谐振陀螺的敏感结构为轴对称的半球形壳体,采用高品质因数的熔融石英材料加工而成,半球形壳体内外表面镀金属化涂层,用于振动检测和静电力控制,采用高真空度封装,陀螺制造成本昂贵。
然而,新型固态谐振陀螺采用较低Q 值(约104)的金属材料而不是高Q 值(约107)的熔融石英,同时用筒状结构代替半球型结构,这些改变使得金属筒状科氏振动陀螺的加工可以采用通用的机械加工技术,有效地降低加工难度,提高了成品率,同时也易于实现批量化生产,降低成本。金属材料比石英材料具有更大的质量,可以有效避免谐振子加工过程中表面加工缺陷对陀螺的影响,同时较大的质量可以有利于抑制外界振动影响[5]。经过上述设计,该新型固态谐振陀螺具备了低成本、小型化、批量化的特性,也覆盖了商业航天市场的需求。
该陀螺与半球谐振陀螺具有相同的特征,陀螺噪声性能不受量子效应限制,噪声性能与布朗噪声相关,具有很好的噪声特性[6-7]。在相同的体积下,该陀螺在代表陀螺精度水平的随机漂移指标上可以覆盖1 °/h~0.01 °/h 的范围,对比当前MEMS 陀螺具有较大的性能优势;对比中等精度的光纤陀螺、机械陀螺,具有十分明显的重量和成本优势,该陀螺的市场定位如图1所示。
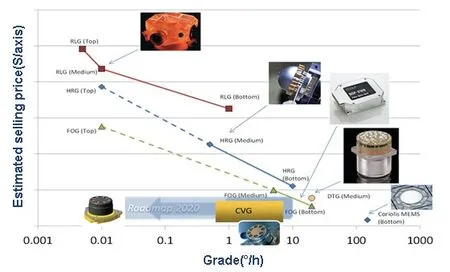
图1 新型固态谐振陀螺的市场定位Fig.1 The market positioning of the M-CVG
1.1 基本结构
该新型固态谐振陀螺主要由筒状谐振子、安装基座、密封壳体三个部件组成[5]。这些部件均采用不同材质的金属材料加工而成。新型固态谐振陀螺的核心部件如图2所示,以Innalabs 公司的陀螺为例。陀螺采用真空密封,一般真空度大约为5×10-4atm,保证筒状谐振子的Q 值达到20000 以上。创新地采用压电陶瓷作为陀螺的检测和驱动装置,该装置有电路噪声低和角速率敏感噪声低的优势[8,9]。根据陀螺精度要求与使用工况,陀螺可选择不同直径规格的谐振子,例如Φ43、Φ25 和Φ17 等。本文研究的惯性姿态敏感器选用Φ25 直径的谐振子,可在体积、精度和使用工况方面达到最优。

图2 Innalabs 公司陀螺核心部件示意图Fig.2 The core components of Innalabs’ CVG
1.2 工作原理
新型固态谐振陀螺是利用筒状谐振子唇缘上的2阶振动驻波来工作。筒状谐振子受激产生四波幅振动,它具有四个波腹和四个波节。当陀螺载体不旋转的时候,波腹和波节的位置保持不变;而当基座旋转时,驻波要发生进动,进动角与旋转角的比例系数为K。当基座绕中心轴转动Ø 度,半球驻波进动θ=KØ。通过检测振型位置的变化就可以测算出基座的旋转角度。
与半球谐振陀螺一样,新型固态谐振陀螺也具有两种工作模式,分别为力平衡工作模式和全角工作模式。在全角模式下,陀螺是一种速率积分陀螺,通过检测振型自由进动的角度,得到陀螺的输入角速度。该模式下,陀螺的标度因数非常稳定,一般在高角速率的场合应用。在力平衡模式下,陀螺是一种速率陀螺,激励电极控制谐振子波节和波腹相对于壳体的位置保持不变,激励电极产生的平衡力的大小与陀螺输入角速度成正比,根据平衡力可以计算出陀螺的输入角速度。该模式下,陀螺噪声低,零偏稳定性好,但测量角速率范围较小,一般在低角速率、高精度的场合应用。
然而,新型固态谐振陀螺采用压电陶瓷作为激励和检测电极,压电陶瓷电极的激励效率比半球谐振陀螺的静电电极激励效率高,仅采用力平衡工作模式就可以获得高动态特性,因此新型固态谐振陀螺主流工作模式为力平衡工作模式[10]。该工作模式下振动驻波被闭环控制回路固定在特定的位置,如图3所示,当外界有角速率输入时,该振动驻波在科氏力的作用下将会发生进动,闭环控制回路此时将利用压电陶瓷电极产生反作用力,抵消产生的科氏力,使谐振子上的驻波保持固定;控制回路施加的反作用力与外界角速率成比例关系,通过反作用力可知获得外界角速率的量值,从而实现角速率的测量。
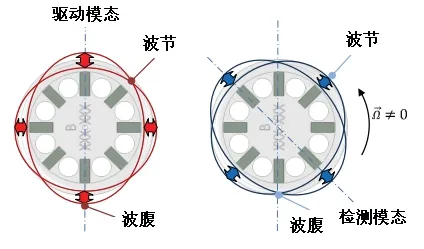
图3 新型固态谐振陀螺工作模态及原理示意图Fig.3 The operating modal and principle of the M-CVG
2 控制技术研究
在力平衡工作模式下,陀螺控制电路有4 个控制回路,分别为幅度控制回路,用来维持和控制谐振子的振动幅度;频率跟踪回路,用来跟踪谐振子的自然谐振频率以及同步陀螺的检测和激励信号;正交控制回路,用来补偿谐振子质量微小不平衡引起的误差;力平衡控制回路,实现谐振子稳定输出的力再平衡闭环控制。
商业航天市场相比传统航天市场对惯性姿态敏感器的需求特征相差很大,商业航天市场对惯性姿态敏感器的需求量大,要求交付周期短,这对传统的生产模式带来极大的挑战。为了应对这种挑战,应该在产品的设计上做出创新性改变。因此本文以陀螺控制作为切入点,研究一种陀螺控制技术来解决传统生产模式的弊端,使其满足商业航天的需求。
以模拟器件为主的陀螺控制电路会存在以下问题:因器件的老化、参数温漂等因素带来陀螺性能的变化;无法实现复杂的控制算法提升陀螺的性能;无法实现体积的微小型化和控制的自主化操作;批量化生产成本高等。因此本文在选择全数字控制模式,硬件电路采用数字器件实现,核心控制算法采用软件实现,软件采用参数化设计,最终以软件参数配置产品的技术状态。本文研究的控制方案可实现最大程度保证陀螺的全生命周期的性能;在生产上适应批量化生产,实现最大限度提升生产效率;面对未来可能更大规模的商业需求,控制电路还可实现更大规模集成,更大程度降低成本、体积和功耗。
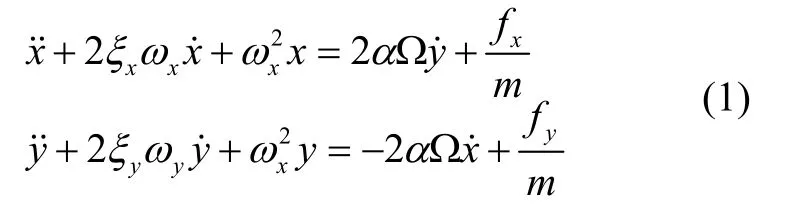
本文研究的控制方法以新型固态谐振陀螺作为被控对象,基于半球谐振陀螺技术的新型固态谐振陀螺的数学模型可用式(1)表示。
陀螺全数字控制方案如图4所示。在该方案中陀螺输出两路信号,一路是0 °电极轴的波腹振动信号(驱动信号),反映驻波的振动信息;另一路是45 °电极轴的波节信号(敏感信号),反映了陀螺在科氏力作用下波节的进动,这两路信号均被陀螺的本征频率调制。在该方案中,波腹信号经过数字解调后计算出波腹信号的幅值与相位,用于幅度控制和频率跟踪控制。波节信号经过数字解调后计算出波节信号的幅值与相位,用于正交控制和力反馈控制。
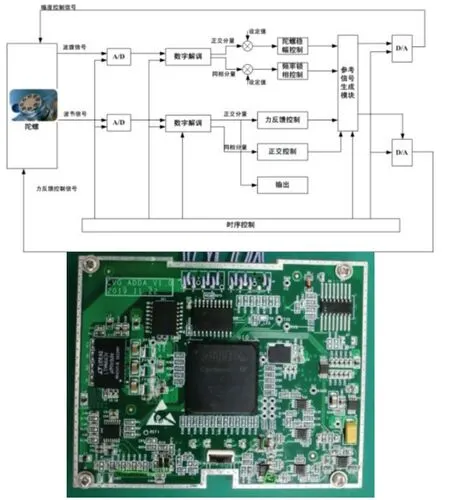
图4 陀螺全数字控制方案示意图及控制电路实物图Fig.4 Simplified scheme for the fully digital loop control method (left),physical diagram of control circuit (right)
本文研究的全数字控制方法有以下3 方面关键技术,分别为基于Kalman 滤波的信号数字解算方法、自适应陀螺起振方法、在线自动测试技术。
2.1 基于Kalman 滤波的信号数字解算方法
根据图4可知,全数字控制的核心在于数字解调算法。本文提出采用卡尔曼(Kalman)滤波算法作为该陀螺的数字解算方案。
陀螺的输出信号可用式(2)表示:

其中,y(t)为陀螺输出信号,A1为陀螺运动信号中同相分量幅值,A2为陀螺运动信号中正交分量幅值,n(t)为系统噪声,ω为陀螺谐振频率。
数字解调算法的作用是将陀螺输出信号y(t)中A1和A2提取出来。采用Kalman 滤波进行解算的关键是建立系统的状态空间方程。在实际应用中,陀螺的驱动频率远远高于角速率信号的变化频率,因此可以假设在两个相邻的时间间隔内,角速率基本保持不变,靠噪声项驱动其变化[12]。
此品种在我区仅示范一年,加之今年降雨量较往年减少六成,对观察品种特性有所影响,为了进一步观察其品种特性、稳定性,建议继续在我区示范观察。
根据假设,建立系统的离散系统状态空间方程为:

其中,

式中,x(k)表示陀螺输出信号y(t)中的A1和A2,z(k)表示状态观测量,r(k)表示解调参考信号,w(k)表示状态方程的白噪声,代表角速率的微小变化,v(k)表示观测的白噪声。
根据Kalmanl 滤波理论可知:

利用Kalman 滤波方程可求解x(k)的估计值xˆ(k),递推公式为:
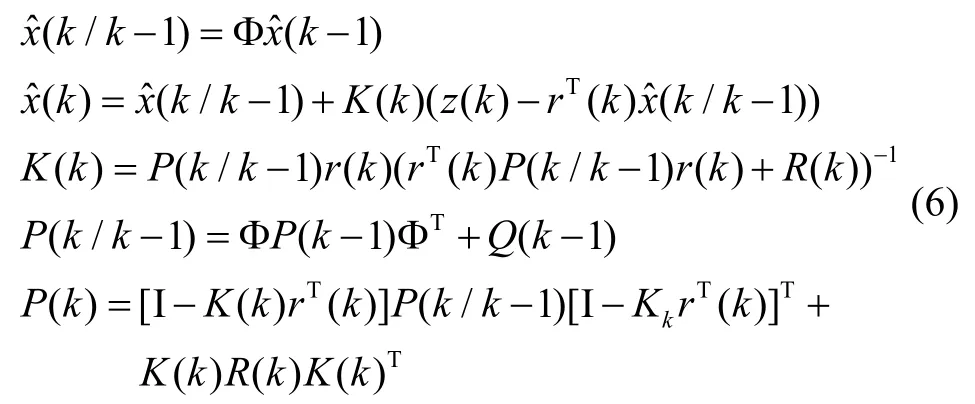
选取合适的方差阵Q(k)、R(k),根据式(6)的递推公式可解算出陀螺输出信号的A1和A2。
2.2 自适应陀螺起振方法
面向商业航天的惯性姿态敏感器在生产调试环节需要最大限度的减少调试工序,实现自主化控制参数辨识。在力平衡工作模式下,频率跟踪回路是其他3个控制回路的基础,用于跟踪谐振子的自然谐振频率以及同步陀螺的检测和激励信号。本文采用基于Kalman 滤波算法的全数字锁相环方法实现频率跟踪控制。
通常,采用全数字锁相环方法实现频率跟踪控制需要设置频率初值,用于保证陀螺的起振工作。然而由于批次制造导致陀螺的本征谐振频率分布范围比较大。逐一测试陀螺的自然频率并在频率跟踪控制中设置初始频率,可以保证每只陀螺的正常工作,但是这会降低生产效率并增加成本[13]。因此,为了适应商业航天的生产需求,针对本文研究的新型固态谐振陀螺控制必须改变目前现状,本文采用一种自适应的陀螺起振方法,实现自主辨识陀螺的谐振频率,自动设置频率跟踪控制所需的频率初值。
本文研究的自适应陀螺频率辨识方法基于自激振荡原理,自激振荡原理本质上是一个正反馈环路系统,工作原理与正弦波振荡电路类似,如图5所示,它没有输入信号,是一个带选频网络的正反馈放大电路。
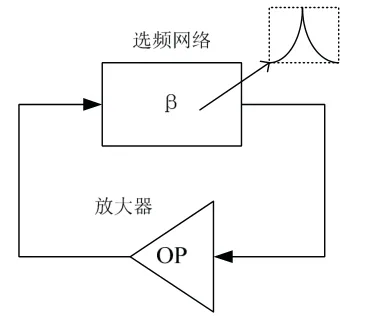
图5 自激振荡基本原理图Fig.5 Basic principle diagram of self-excited oscillation
自激振荡电路的起振条件是选频网络选择的信号在环路中满足以下条件:

其中,G为环路增益,φ为环路相位。
新型固态谐振陀螺的谐振子真空封装在腔体内,驱动模态Q 值在20000~50000 之间,陀螺本身就是一个具有很好选频特性的网络。当陀螺处于谐振时,输入驱动信号与输出驱动检测信号相位差为-90°+ψ。因此,为了保证控制环路满足公式条件,只需在控制电路中补偿相位,使其满足式(7)条件即可。
自适应陀螺起振方案如图6所示,在数字控制电路中,首先进行数字移相90 °,使控制环路满足自激相位条件;然后调整环路增益,使其满足环路增益条件;最后当陀螺自激振荡起来后,由于陀螺本身的选频特性,环路振荡的信号就是频率控制回路正常工作的频率初值,采用基于Kalman 滤波的频率算法解算出陀螺当前工况的本征谐振频率,并设置到频率控制环路中,保证陀螺正常工作。
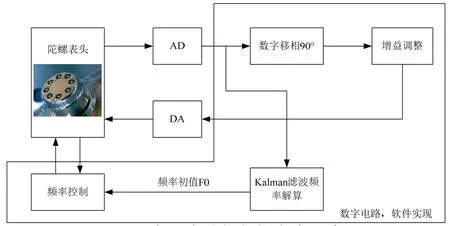
图6 自适应陀螺起振方案示意图Fig.6 Schematic diagram of adaptive starting scheme
2.3 在线自测试技术
基于本文研究的全数字控制技术,使得在线自动测试成为现实。本文实现了2 项在线自动测试技术,一是在线硬件状态健康检测,二是在线带宽自动测试。
如图7所示,在线硬件状态健康检测方法是在线自动测试功能模块内(软件实现)产生一个500 Hz的正弦信号,通过DA 转换为模拟量施加到硬件电路上,然后AD 采集经过硬件电路的信号,之后通过Kalman 滤波算法解调采集的信号,如果符合一定的判定条件,则认为硬件状态健康。在线带宽自动测试方法是在线自动测试功能模块内(软件实现)产生一个单位阶跃信号,通过DA 转换后分别施加到每个控制环路中,然后采集各个控制环路的控制量数据,按照经典控制理论方法估算陀螺的带宽。
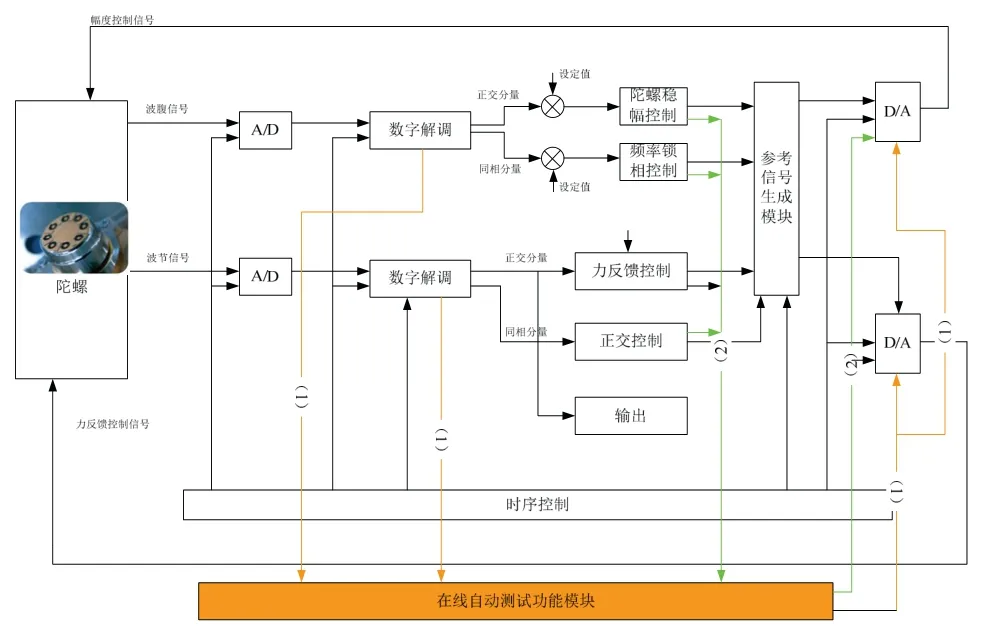
图7 在线自动测试信号流图Fig.7 Signal flow diagram of the automatic in-line testing
根据设计思想,依靠全数字控制技术还可以实现控制参数自整定,待后续研究。
3 敏感器实现
3.1 敏感器组成
宇航产品相对于军级和工业级产品最大的特点在于受空间辐照和不可更换性,因此宇航产品必须进行冗余配置。虽然商业航天市场要求对体积、成本比较比较敏感,但是冗余配置依然是空间产品设计不可回避的设计因素。
本文研究的基于新型固态谐振陀螺的惯性姿态敏感器采用4 通道独立设计,具有1 通道的冗余度。陀螺测量输入轴采用3+1S 空间布局,陀螺组件中的G1陀螺、G2 陀螺、G3 陀螺的输入轴沿陀螺组件本体坐标系+X、+Y、+Z 轴安装,G4 陀螺分别于+X、+Y、+Z 轴夹角为54.73°。整机采用一体化结构设计,采用二次电源供电(±5V),控制电路负责陀螺的闭环控制和接口管理和陀螺补偿。整机产品由4 只陀螺表头和4 块控制电路组成4 个独立的测量通道,各测量通道间无共用电路,避免了整机单点故障,整机配置,如图8所示。
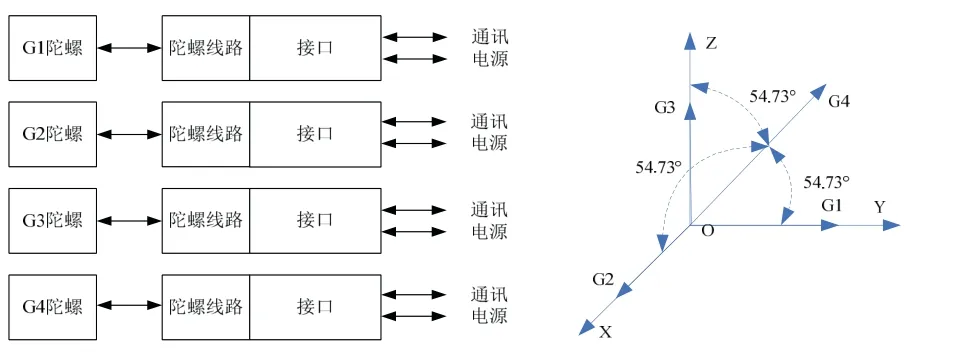
图8 整机配置方案与陀螺输入轴空间分布示意图Fig.8 Product configuration scheme (left)and Schematic diagramof spatial distribution of gyro input axis (right)
3.2 敏感器的指标实现情况
整机结构外形示意图如图9所示,陀螺组件结构放置在底板中间,4 块控制电路板放置在陀螺组件周围,为了提高产品的可维修性,各个功能模块采用柔性排线连接,方便装配和维修。

图9 整机结构示意图Fig.9 Product structural diagram
基于上述控制技术实现的惯性姿态敏感器的主要性能指标实现情况如表1所示。
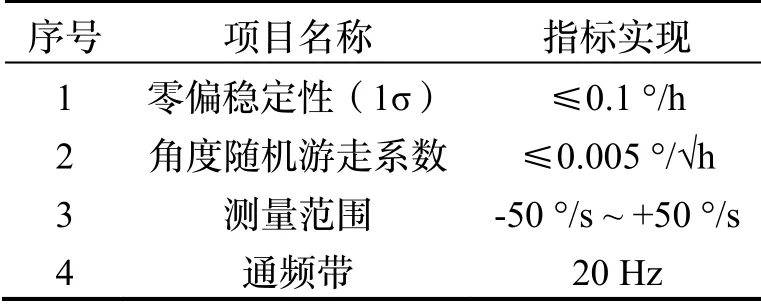
表1 敏感器主要性能指标实现情况Tab.1 The main performance of the sensor
3.3 验证与应用
本节首先采用Allan 方差方法对本文研究的惯性姿态敏感器的噪声特性进行分析,然后采用统计方法分析惯性姿态敏感器各轴的零偏稳定性指标。通过分析实测数据可知,本文研究的新型固态谐振陀螺的角度随游走系数指标优于0.005 °/√h,零偏稳定性指标优于0.1 °/h(1σ)。
基于对新型固态谐振陀螺控制技术的研究和惯性姿态敏感器设计的基础,自研的新型固态谐振陀螺惯性姿态敏感器已随某型卫星完成了短期的空间搭载验证,后续还将进行长期在轨搭载试验考核。
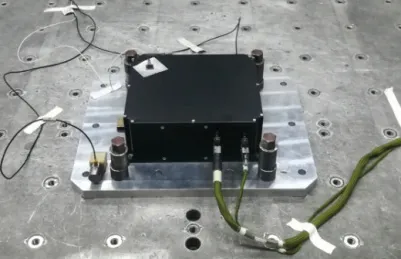
图10 搭载产品实物图Fig.10 Physical picture of satellite application product
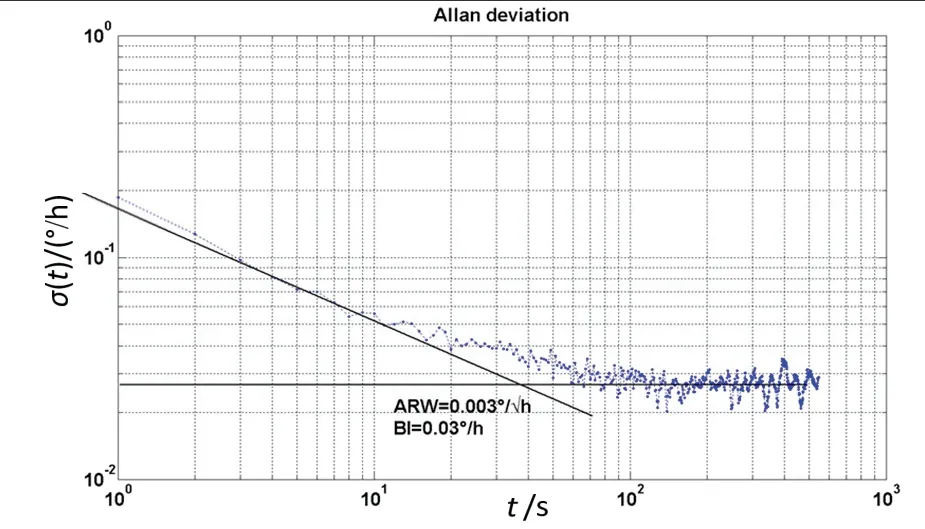
图11 Allan 方差曲线Fig.11 Allan Variance of the M-CVG
4 结 论
面对商业航天市场对惯性姿态敏感器的需求,本文首先介绍了一种新型金属筒状全固态谐振陀螺,该陀螺具备极好的C-SWaP 特性,原理上具有高可靠、长寿命的基本特性,非常适合商业航天应用;其次,针对该新型全固态谐振陀螺的控制问题和综合考虑商业航天的特点,重点研究了一种全数字陀螺控制技术,提出了3 种控制与测试方法;然后,以研究的控制方法为基础,设计了基于新型全固态谐振陀螺的惯性姿态敏感器,并对其进行了测试评估。通过分析敏感器的实测数据,评估结果表明本文研究的3+1S 型敏感器的零偏稳定性指标均优于0.1 °/h(1σ)、角度随机游走系数指标均优于0.005 °/√h,可完全满足商业航天对惯性姿态敏感器的性能、成本和可靠性的要求,是商业航天领域惯性姿态敏感器的优选方案。
