一种基于自注入锁定的谐振式微光学陀螺设计
2020-03-01耿靖童郜中星张勇刚
杨 柳,耿靖童,郜中星,张勇刚
(哈尔滨工程大学智能科学与工程学院,哈尔滨 150001)
近年来,在国家载人航天、深空和深海探测等重大工程需求下,惯性技术的快速发展对惯性器件提出了更高的要求,在确保满足高精度需求的同时,还要求它具备微体积、低功耗、高可靠性、低成本和抗振动冲击等特性。陀螺仪的发展水平直接影响着惯性导航和制导系统的关键性能,在国防领域发挥着不可替代的作用。目前,惯性角速度传感器如激光陀螺(RLG)[1]、光纤陀螺(FOG)[2]、微机电系统(MEMS)陀螺[3]等已广泛应用于商业和军事领域。但是RLG 内部光电部件繁多,制作难度大、成本较高且不利于小型化;FOG 精度与内部光纤绕环的长度有关,高精度FOG 需要几千米长的环,也难以进行小型化;基于MEMS 的传感器已经获得了一定的应用,但还不能达到与RLG 和FOG 相同的灵敏度。
目前,基于不同工作原理人们提出了不同的微光学陀螺仪的设计方案,如环形微激光陀螺仪[4],光纤环形谐振腔微光学陀螺仪[5],微谐振腔布里渊陀螺仪[6],PT-对称微尺度光学陀螺仪[7],波导微环型谐振腔光学陀螺仪[8-11]。虽然核心敏感单元谐振腔的性能得到了显著改善[12-14],但尚未实现高灵敏度微光学陀螺仪的最终目标[15]。基于芯片级光学谐振腔的谐振微光学陀螺(RMOG)以其高灵敏度、小型化和低成本的潜力被视为新一代光学陀螺的理想选择[16-19]。但是,检测技术不成熟[20]和较低的信噪比(由热波动、偏振噪声[21]和背向散射噪声[22,23]引起)导致RMOG 仍处于实验研究阶段,与成熟的RLG 或FOG 相比灵敏度较低。此外,传统RMOG 使用的窄线宽可调谐激光器尺寸较大,不利于小型化。
本文提出了一种基于自注入锁定技术的高灵敏度RMOG 设计方案。自注入锁定技术,是一种能够使半导体激光器线宽有效压窄、中心频率稳定的技术,在分布式反馈半导体(Distributed feedback semiconductor,DFB)激光器自注入锁定的过程中,锁定范围可以达到GHz 量级,且激光器稳定性保持在1.8KHz 以内[24]。但近期报道的基于自注入锁定拉曼激光器陀螺仪的相关研究工作中,由于拉曼激光的产生过程中受到各种噪声源的影响,导致陀螺精度不太理想[25]。本方案将采用两路信号快速切换的方法来增强互易性灵敏度(已报道的实验结果显示该方法可检测到比传统方案小30 倍的相移[21]),能够有效降低噪声影响,提升陀螺灵敏度。同时利用高分辨率时间-数字转换器(TDC)直接测量两个输出(顺时针CW 方向和逆时针CCW 方向)耦合形成的拍频可以消除光噪声、激光漂移和热波动的非互易影响,大大提高RMOG 的灵敏度。此外,在该新型RMOG 方案中,由于线宽压窄效应,一个体积约为10 cm3、线宽为MHz 的低成本分布式反馈半导体激光器(DFB)即可满足要求[26-29],较传统谐振式光学陀螺仪所需的窄线宽可调谐激光器体积减小约40 倍,成本降低约30 倍。
综上所述,与传统谐振式陀螺相比,本论文提出的基于自注入锁定技术的RMOG 优势在于:1)将大尺寸(480 cm3)的窄线宽可调谐激光器替换成小尺寸(10 cm3)的DFB 激光器,大大降低了陀螺体积和成本;2)允许片上集成;3)利用互易性增强技术消除多种光学噪声引起的误差以增强陀螺灵敏度。并且本方案中采用的相关技术相对成熟,只需稍加工程设计即可实现高灵敏度的RMOG。
1 基于自注入锁定的RMOG 设计与分析
1.1 RMOG 的结构设计及工作原理
图1为本文所设计的新型RMOG的结构和工作原理图。
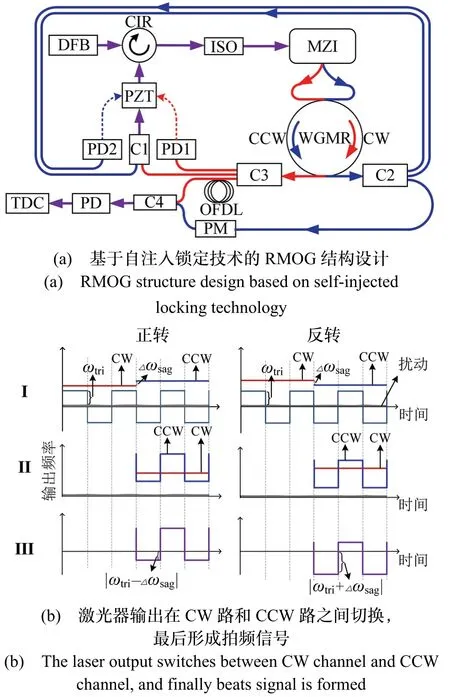
图1 新型RMOG 结构设计和工作原理。Fig.1 The structure design and working principle of new RMOG..
在图1(a)中,我们展示了所设计的RMOG 结构。图中,DFB:分布式反馈激光器;CIR:环形器;Ci:第i个耦合器;ISO:隔离器;MZI:马赫-曾德尔干涉仪;OFDL:光纤延迟线;PM:相位调制器;PDi:第i个光电探测器;TDC:时间-数字转换器;PZT:压电陶瓷相位调制器。核心敏感元件可以由各种无源微谐振腔组成,如WGMR、波导环形谐振腔和微纳光纤谐振腔等。通过自注入锁定技术将一个单纵模DFB 激光器的中心频率锁定在谐振腔谐振频率上。由于MZI的作用,谐振腔中的光可以从CCW 路和CW 路两个方向进行反馈,并且反馈光的切换周期为TMZI,此外,根据PD1 和PD2 的信号变化通过电路主动控制PZT,保证反馈光处于同向状态。根据Sagnac 效应,给出了谐振腔中CCW 路与CW 路之间的谐振角频差

其中,D和ns分别为谐振腔的直径和折射率,Ω 为RMOG 的角速度,λ为波长。OFDL 的作用是在CW路径中提供TMZI/2的时间延迟;C4 的输出是一个拍频信号并用TDC 测量;在CIR 之后放置ISO 是用来防止背向散射噪声影响激光器。同时,采用PM 对光信号进行周期性调制,避免由于转速慢而造成的长时间测量。图1(b)展示了RMOG 工作时光信号经历的三个阶段。第Ⅰ阶段(激光信号经过谐振腔后),WGMR中CCW 和CW 方向两路光之间存在频差Δωsag,PM的调制频率设置为ωtri;第Ⅱ阶段,CCW 方向光波经过PM 进行相位调制,频率发生周期性变化,CW 方向光波经过OFDL 发生了时间延迟,但是频率未发生改变;第Ⅲ阶段,CCW 方向光波和CW 方向光波耦合形成拍频信号。RMOG 的旋转方向可以很容易地通过拍频|Δωsag±ωtri|来区分。
1.2 基于外腔的自注入锁定技术
利用基于光场E和载流子浓度N的Lang 和Kobayashi (L-K)方程,我们来分析半导体激光器受外部谐振腔光反馈的动态过程[30]
其中,G=g(N-N0)/(1+εNL|E|2)为模式增益(g,εNL和N0分别表示增益系数、线性增益因子和透明载流子密度);η为线宽增强因子;τp和τin分别为激光腔内光子的寿命和往返时间;K为反馈系数;ω0和τ分别为自由运行激光器的中心角频率和总反馈延迟时间;I,V,e和τn分别为激光器的注入电流、有源区体积、单位电子电荷和载流子寿命。通过式(2)和(3)可得到稳态方程如下所示

其中,自由运行频率ω0和稳态激光频率ωs分别与谐振腔谐振频率ωm的失谐表示为ξ=ω0-ωm和ζ=ωs-ωm。在自注入锁定RMOG 系统中,反馈光来自外部谐振腔。将反馈系数定义为K=k|B(ζ)|,其中,B(ζ)为谐振腔的透射系数,k为常值系数。ψ=ωsτ-arg[B(ζ)]+tan-1η=ψ0+ζτ-arg[B(ζ)]表 示相位延迟(ψ0表示初始相位延迟,与锁定状态有关,可通过τ和ωm进行调节)。利用多波束干涉原理,可以得到
其中,Ein和Eout(ζ)分别为谐振腔的输入光场和输出光场;T 和α为谐振腔的耦合系数和衰减系数;τm=2nsπD/c为光子环绕谐振腔一圈的时间(c为真空中的光速);R'=T (1-α),Q'=(1-T)(1-α),Q=Q'e-Δω0τm(Δω0为自由运行激光器的线宽)。
1.3 反馈光相位设计
在弱反馈时,如果反馈光与激光器内部的光场同相,激光器输出激光能够稳定并且线宽被压窄;如果反馈光与激光器内部光场反相,即它们之间的相位差为π时,激光的线宽不仅没有被压窄,反而会因为反馈而引起模式跳动。如图2所示,当反馈光同相时,激光增益取最大值,有利于该激光模式在激光腔内振荡。而当反馈光反向时,激光增益取最小值,反馈光会抑制该纵模在激光腔内的振荡。因此,我们在陀螺系统中加入了PZT,将谐振腔透射光强锁定在峰值上,达到一个动态的稳定,保证反馈光与激光器内部光场的同相。
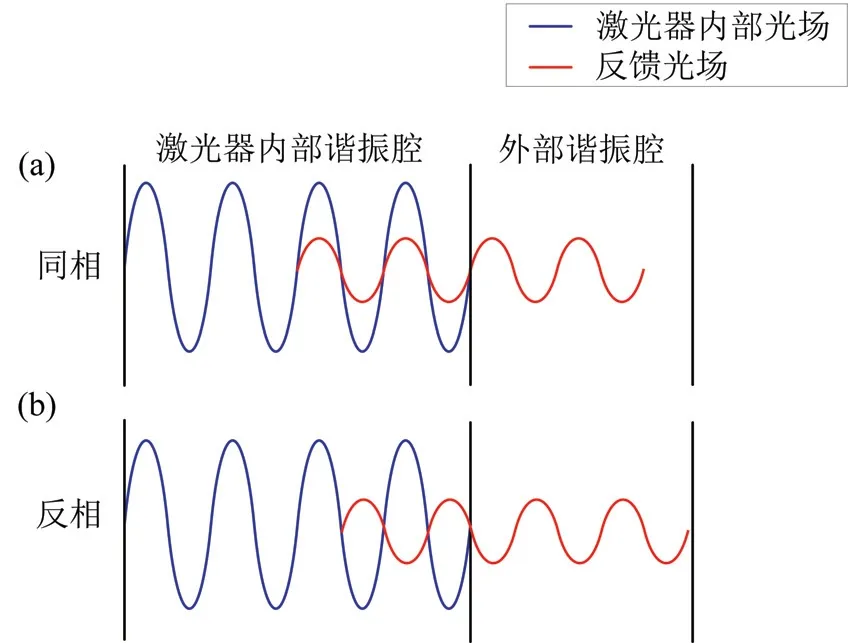
图2 激光器内部光场与外部反馈光场的相位关系Fig.2 The phase relationship between the light field reflected by the cavity mirror and the external feedback light field
1.4 互易性灵敏度增强和拍频检测方法
图1(a)谐振式微光学陀螺系统中的CCW 路和CW 路耦合得到的拍频即为二者的绝对频率差。两路光场可以分别表示为E1=E0cos[(ωm1+Δωerr1)t+φ1]和E2=E0cos[(ωm2+ωtri+Δωerr2)t+φ2],其中Δωm1和Δωm2分别为两个光场的谐振频率;Δωerr1和 Δωerr2为激光频率漂移和谐振腔热波动引起的两条路径的频率波动;φ1和φ2是两个光场的初始相位;ωtri=+ωtri0(0<t≤0.5Ttri),-ωtri0(0.5Ttri<t≤Ttri)为PM调制的三角波频率。
在本系统中,如果我们用比频率波动更快的速度切换路径,大部分的噪声扰动仍然是相关的[8]。因此,这些相关的扰动可以通过将两个输出光路相加再减去相同的信号来抵消。设定TMZI>Ttri,然后得到

其中,Δωsag=ωm1-ωm2为Sagnac 效应引起的频差;拍频Δω=|±Δωsag+ωtri|(“±”表示RMOG 在CW 和CCW 方向上的旋转)。当谐振腔中的光路沿着CCW方向旋转时,拍频检测信号的前半周期频率小于后半周期频率,此时转动方向为正;同理当谐振腔中的光路沿着CW 方向旋转时,拍频检测信号的前半周期频率大于后半周期频率,转动方向则为负。这样就可以方便地用符号区分旋转方向。
2 RMOG 的特性分析
2.1 RMOG 的动态特性分析
为了使RMOG 系统处于稳定状态,探究系统的动态演化过程是必要的。由1.2 节的速率方程可知,反馈系数K主要影响光反馈半导体激光器的稳定性。图3、图4中各参数为η=5,g=1.414×1 0-3μm-3ns-1,N0=4.45×105μm-3,εNL=2×10-5μm3,τp=1.17 ps,τ=10 ns,ω0=3.87π×104GHz,I=0.03 A,V=324 μm3,τn=2.5 ns,τin=7 ps。我们计算出输出光场强度的极值随K变化的函数,如图3、图4所示。
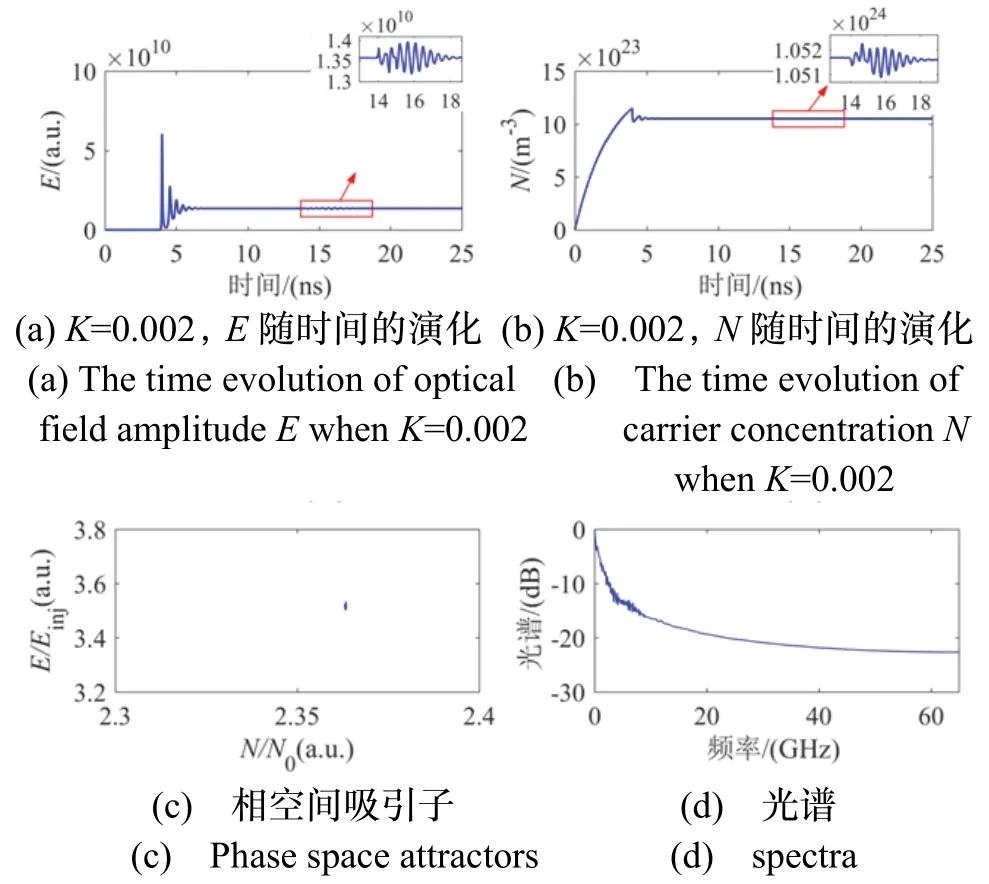
图3 反馈系数(K=0.002)对DFB 稳定性的影响曲线Fig.3 The influence curve of feedback coefficient(K=0.002)on the stability of DFB
发现,当反馈系数较小时,系统处于稳定工作状态,否则激光器会出现弛豫震荡现象。在这种情况下,当反馈在τ时间(激光器到谐振腔的往返时间)延迟注入时,激光器经过一段短的弛豫震荡后会趋于稳定,如图3(a)和(b)所示。自注入锁定效应的响应时间只有几纳秒,对于TMZI来说时间足够短。图3(c)和(d)分别显示了相空间吸引子成孤立点状并且光谱表现为单纵模,因此可以判定激光器工作在稳定状态。
如图4所示,当反馈系数K=0.02时,光场振幅和载流子浓度输出呈无规则时域波形,相空间观测到混沌吸引子,光谱也观测到明显的宽带信号,因此判断此时激光器工作在混沌动态区间。
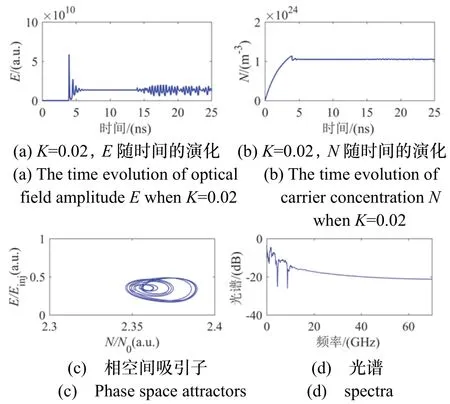
图4 反馈系数(K=0.02)对DFB 稳定性的影响曲线Fig.4 The influence curve of feedback coefficient (K=0.02)on the stability of DFB
2.2 自注入锁定光频率稳定性的影响因素
在设计RMOG 系统的拍频检测时,需要一个频率具有高稳定性的信号源。在ns=1.45,T=0.01,Δω0=2 KHz 时,我们绘制不同参数下的自注入锁定光频率稳定性曲线,如图5所示。我们将自注入锁定产生的光频率ωs锁定在谐振腔的谐振频率ωm附近,如图5(c)(k=0.003)所示。调节自由运行的激光频率ω0接近ωm时,ωs会在转折点处跃迁到稳定锁定区域。同样,如果ω0远离ωm(超出锁定范围),ωs将会失锁。值得注意的是,将锁定区域放大后实际上是一条斜率较小的直线,这表明由于自由运行激光频率ω0的漂移,产生的ωs不能完全锁定在谐振腔频率ωm上,这是利用MZI 快速切换光路以增强互易性的原因之一。
从图5(a)-(f)可以看出,自注入锁定与往返时间τ、初始相位延迟ψ0、反馈常数系数k、谐振腔的直径D、衰减系数α和自由频谱宽度(FSR)有关。从图5(a)中可以看出应设置尽量短的往返时间,以避免出现不理想的多稳定性;图5(b)表明初始相位延迟可在小范围内调整,过大可能导致产生的激光器频率ωs与谐振腔ωm的额外失谐或导致频率跳变,正如1.3 节分析过,反馈相位同相时会具有稳定的系统状态;图5(c)表明在稳态条件下,随着k的增加,锁频范围会变大;在图5(d)中,我们可以通过改变谐振微腔的直径D来控制锁频范围,直径越大其锁定范围越大,这是由于谐振腔的大小会直接影响其半高全宽(FWHM),FWHM 越窄其锁定范围越大且平缓,激光器的输出频率会越稳定性。但实际上,微谐振腔尺寸越大,相应的损耗增加也会使FWHM 变宽,因此需要综合考虑谐振腔的尺寸;图5(e)表明锁定范围随着衰减系数的减小而增大。图5(f)显示了当FSR 为82 MHz 和94 MHz 时,即锁定范围大于谐振腔的FSR时,会发生跳模现象。
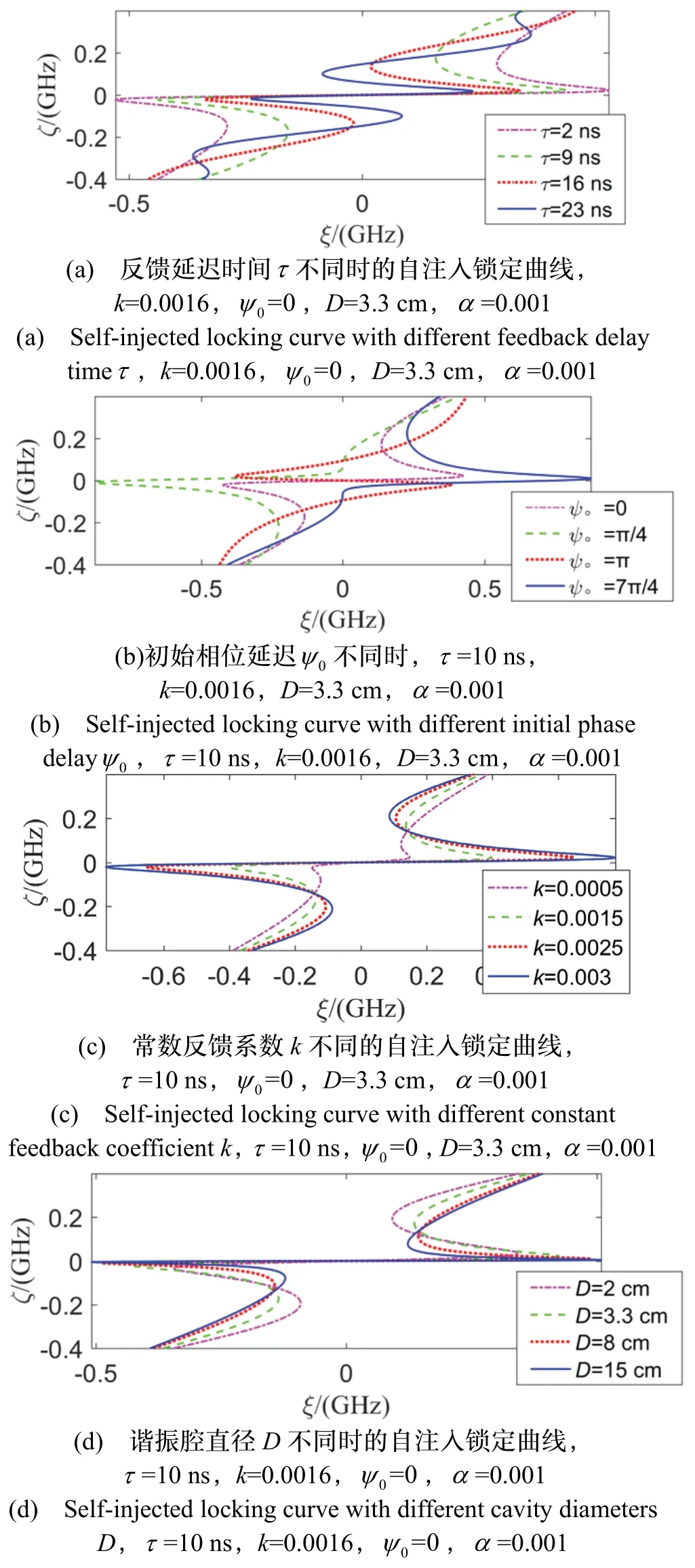
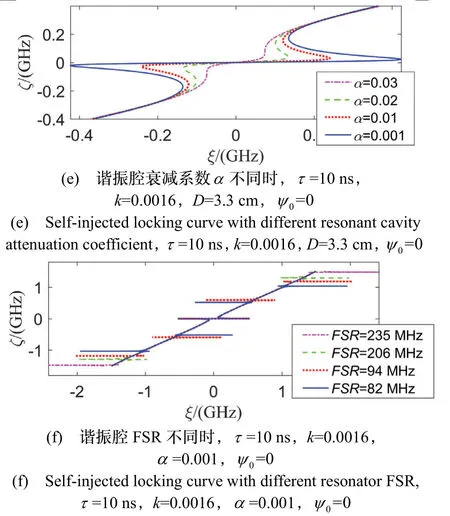
图5 不同参数下的自注入光频率稳定性曲线Fig.5 Frequency stability curves of self-injected light underdifferent parameters
2.3 RMOG 的灵敏度分析
一方面,根据1.4 节中的讨论,通过测量拍频可以消除较大部分温度波动所引起的激光频率漂移和热波动干扰。另一方面,PD 的灵敏度为10 pW 量级,假设PD 测得的平均光强为1 mW,当Δωs~2 KHz 时,与时间测量对RMOG 的灵敏度限制相比,PD 对RMOG 的灵敏度限制可以忽略不计。目前,使用TDC测量时间的分辨率δ约为10 ps,则最小可探测角频率为
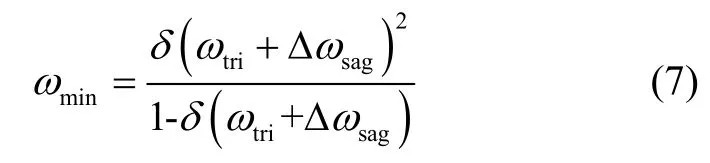
由式(7)可知,ωmin的值取决于Δωsag和ωtri。
在图6中,我们展示了由式(1)和(7)得到的RMOG灵敏度和最小可检测角频差,虽然灵敏度会随着角速度的增加而变差,但是通过降低调制频率ωtri可以有效地降低灵敏度(最小可检测角速度 Ωmin)。一个时间段的测量精度取决于所持续的时间。RMOG 灵敏度的分辨率可以在|ωtri|=6 KHz 左右达到 2×1 0-4°/h。
图6 不同调制频率 下角速度测量的灵敏度和最小可检测角频差,λ=1550 nmFig.6 Sensitivity and minimum detectable angular frequency difference of angular velocity measurement at different modulation frequencies ,λ=1550 nm
3 结 论
综上所述,本文提出了一种基于自注入锁定技术的高灵敏度RMOG 方案,分析了激光对微谐振腔的锁定过程,找到了稳定的工作条件和调整锁定范围的方法。通过两光路切换和拍频信号的直接测量来增强互易性,从而提高RMOG 的灵敏度。此外,利用MHz的小尺寸DFB 可以实现微型化,并且可实现线宽压窄的效果。在高精度时间测量中,通过改变调制频率可以控制陀螺的灵敏度。方案中用到的互易性增强、自注入锁定和拍频检测等技术相对成熟,在后续的研究中,将进行电路设计和光路的搭建工作并对方案进行实验验证。我们相信,通过一些工程设计即可实现这种高灵敏度RMOG。
