一种改进的基于粒子滤波的交互式多模型车载跟踪算法
2020-02-21余梦婕张正文
余梦婕 张正文

摘要:本文提出了一种改进的交互式多模型粒子滤波算法。首先设计了针对该情况分析了交互式多模型粒子算法的计算过程和方法;接着将粒子滤波算法融入交互式多模型算法中,按照先验概率密度随机抽取一组粒子,这组粒子经过输入交互、粒子滤波后进行重抽样;然后进行输出交互,如此循环从而提高目标跟踪效果;最后,通过matlab仿真分析了这两种算法的目标跟踪性能,仿真结果表明,交互式多模型粒子算法较交互式多模型算法( IMM)具有更优的跟踪性能,转弯过程中优势更加明显。
关键词:目标跟踪;交互式多模型算法;粒子算法;车载雷达
无线传感技术的高速发展使得传感器节点能够组成自组织网络,雷达方式的无线传感技术具有成本低、容错性高、部署快速等多个优势,适合用于无人驾驶汽车、机动目标跟踪以及目标定位等多种领域[1-2]。
1 车载模型目标跟踪模型及交互式多模型算法
1.1 车载雷达目标跟踪模型
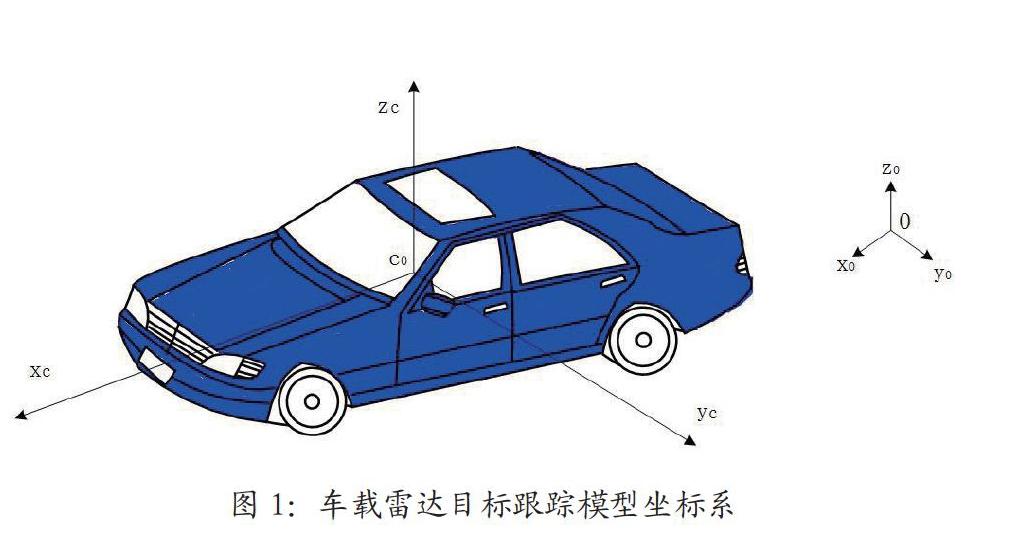
车载雷达目标跟踪模型采用的大地坐标系和车辆运动坐标系如图1所示,在研究车辆运动和目标车辆运动轨迹描述采用的是大地坐标系,基于以原地为坐标, (x0,y0,z0)为坐标轴的坐标系。
车辆坐标系则是以车辆质心作为坐标原点,xe轴是与车辆纵轴保持平行,方向正对车辆前方;yc轴方向平行于车身侧面轴向,方向对着车辆左侧;zc轴方向平行于车辆上垂线,方向为车身上方。
车辆雷达安装位置为车身前方,和车体采用固定连接的方式,同时保证雷达所发出的波束和车辆纵轴线平行,因此,车辆雷达的运动坐标系平行于车辆运动坐标系。
在车辆跟踪目标运动轨迹的过程中,一般不考虑目标车辆的形状等因素影响,而是将目标简化为一个点,可通过牛顿运动定律来描述,其目标运行模型可采用下式:
在描述目标运动状态时一般采用位置、速度和加速度,分别用x、x和x表示。目标跟踪模型可分为多种,包括CA、CT等,以CA模型为例,分析目标运动模型。
1.2 交互式多模型算法
交互式多模型算法是一种能够实现自适应的算法,在运算过程中,可通过多个模型间的组合实现和目标模型的最优匹配,因此在系统估计中,该算法能够有效实现多个并行滤波器的合理方式的联合。正是由于交互式多模型算法实现了交互和动态变化的功能,因此,交互式多模型算法仍然作为最有效的跟踪算法被广泛应用[9]。
交互式多模型算法计算步骤包括4个:输入交互、并行滤波器过滤、滤波数据融合以及概率更新,多个模型间的转移概率服从马尔科夫分布,設转移概率矩阵P可用下式表示:
随着应用过程中跟踪目标机动方式的变化,这就要求跟踪算法模型中包括多种形式的机动,通过多种机动形式的组合能够使得系统的抗干扰性能增加,但是随着机动形式的增加会导致计算量的加大,降低计算效率。因此,模型选择非常关键,既要满足系统机动方式的全面描述,又不能因过多的模型导致算法间竞争降低计算效率。因此可以看出该算法存在一定的缺陷:
为了解决交互式多模型算法的缺陷,提出了一种交互式模型粒子滤波算法。
2 交互式多模型粒子滤波算法
2.1 粒子滤波
粒子滤波是随机抽取附带相应权值的一组粒子,通过蒙特卡洛方法达到或者接近后验概率密度分布。粒子滤波方式的成功应用体现在较为广泛的实际工程领域内,包括车辆雷达跟踪、机器人、自动控制领域等。
贝叶斯认为,后验概率密度(简称PDF)涵盖了序贯估计问题的所有信息,通过一步步递推的方式容易实现系统状态的方差、均值和峰值等参数计算,具体的计算方式如下式[12]:
x9(k+1)=φ(k)x(k)+G(k)v(k)
(22)
z(k+1)=h(k+1)x(k+1)+r(k+1)
(23)
上式中,Q(k)指的是状态转置矩阵,h(k+1)指的是量测矩阵,v(k)、r(k+1)指的是均值等于零的白噪声,v(k)的方差为Q(k),r(k+1)的方差为R(k+1)。
3 结论
本文分析了车载雷达目标跟踪算法一一交互式多模型算法和提出了一种基于粒子滤波的交互式多模型跟踪算法,详细介绍了不同算法的计算过程,并采用matlab仿真对比两种算法的跟踪性能,得出交互式多模型粒子算法作为传统交互式多模型算法的优化算法,具有更优的收敛精度。
参考文献
[1]刘叶楠,张峰,一种改进的交互式多模型粒子滤波算法[J].机械与电子,2018,36 (09):3-6.
[2]吴梦华,基于粒子滤波的目标跟踪算法设计与实现[D].华北电力大学(北京),2018.
[3]刘悄然,杨训.基于改进的交互式多模型粒子滤波算法[J].西北工业大学学报,201 8,36 (01):169-175.
[4]周卫东,孙天,储敏,崔艳青.交互式多模型粒子滤波优化重采样算法[J/OL].北京航空航天大学学报,2019.
[5]唐学大,基于粒子滤波的机动弱目标检测前跟踪算法研究[D].杭州电子科技大学,201 5.
[6]王龙.基于粒子滤波的机动目标跟踪算法[D],南京信息工程大学,2013.
[7]吕铁军,蒋宏,梁国威,丁全心,改进的交互式多模型粒子滤波目标跟踪算法[J/OL].弹箭与制导学报,201 9.
作者简介
余梦婕(1996-),女,湖北省荆门市人。硕士研究生,控制工程。研究方向为信号处理。
张正文(1965-),湖北省黄冈市人,硕士生导师。研究方向为信号处理。
