强噪声干扰条件下的水下弱声源定位技术
2020-02-04郑胜家郑文杰舒剑
郑胜家 郑文杰 舒剑
摘 要:文章针对强噪声干扰条件下的水下弱声源匹配场定位问题,提出离散噪声源干扰抑制的多传感器阵列匹配场处理技术。通过建立最优化问题,约束最优权向量,使其满足对观测方位的波束响应无失真,而对强干扰噪声源方位的响应为零,推导得出上述条件下匹配场模糊度函数的最小方差解。通过弱声源位于强干扰噪声源正下方的实例,验证了所提出方法的有效性。仿真结果表明,在信干比为-10dB情况下,利用所提出的方法实现了水下弱声源的匹配场定位。
关键词:匹配场处理;分布式多传感器阵列;定位
中图分类号:TB556 文献标志码:A 文章编号:2095-2945(2020)03-0033-02
Abstract: Aiming at the localization problem of underwater weak sound source matched field processing under the condition of strong noise interference, this paper proposes a multi-sensor array matched field processing technology for discrete noise source interference suppression. By establishing the optimization problem and constraining the optimal weight vector so that the beam response to the observed azimuth is undistorted and the response to the strong interference noise source azimuth is zero, the minimum variance solution of the output power of the matched field processor under the above constraints is obtained. The effectiveness of the proposed method is verified by an example where a weak sound source is located directly below a strong interference noise source. The simulation results show that, with the signal-to-interference ratio of -10dB, the proposed method is successfully used to locate the underwater weak sound source.
Keywords: matched field processing; distributed multi-sensor array; localization
1 概述
在水聲多传感器阵列信号处理中,主要采用匹配场处理实现声源定位。匹配场处理技术是利用水声信道传播特性,把水下声场模型计算所得的声源到接收阵列的拷贝场,与阵列实际接收数据做匹配,通过功率估计方法实现声源的距离、深度估计。由于海洋环境的复杂性,基于多传感器阵列的匹配场处理声源定位技术,定位性能在目标声源附近区域有干扰噪声源存在时,将削弱或丢失对声源的定位能力,尤其是强噪声干扰条件下的弱声源定位更是如此。
2 干扰噪声源抑制匹配场处理技术
多传感器阵列的匹配场处理是基于水听器采集的数据,与数学模型在设定声源位置预测的拷贝向量之间相互匹配,从而获得到包含目标深度和距离信息的模糊度表面,定义为:
P(?渍)=wH(?渍)Rw(?渍) (1)
线性匹配场处理(CMFP,Conventional Matched Field Processing)的基阵加权向量表示为:
wCMFP(?渍)=(2)
在实际应用中经常使用对角加载的最小方差无畸变响应(DL-MVDR,DiagonalLoading- Minimum Variance Distortionless Response)匹配处理器,其权向量表示为:
wDL-MVDR(?渍)= (3)
干扰噪声源抑制匹配场处理技术可用于抑制水声信道中的离散噪声干扰,其基本原理是设计最优权向量,使其对观测方位信号没有影响,而对离散噪声干扰方位的响应尽量小。上述约束条件可表示为:
wH?琢1(?渍)=d1…wH?琢M(?渍)=dM (4)
其中?琢1(?渍)为观测信号的方向向量,[?琢2(?渍),?琢3(?渍)…?琢M(?渍)]为干扰源声场的拷贝向量,求匹配场处理器对模糊度函数P的最小均方误差响应:
(5)
利用Lagrange乘子法求出干扰噪声源抑制的最优权向量:
w=R-1E[EHR-1E]-1dH (6)
3 仿真数据处理
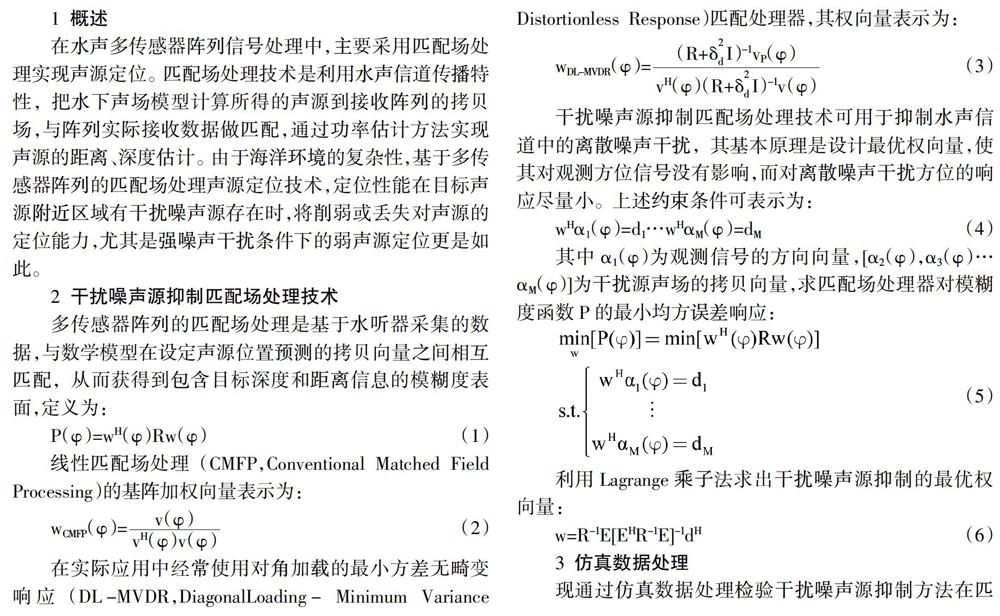
现通过仿真数据处理检验干扰噪声源抑制方法在匹配场处理中的效果。试验中,所用的水听器垂直线列阵阵元数为50,阵元间距为2m,海区深度为100m,假设干扰噪声源和水下声源都是点声源,距离垂直阵均为8公里,两声源信号均为带限白噪声,中心频率为300Hz,干扰噪声源的深度为7m,水下声源的深度为40m。干扰噪声源的声源级比水下声源高出10dB。
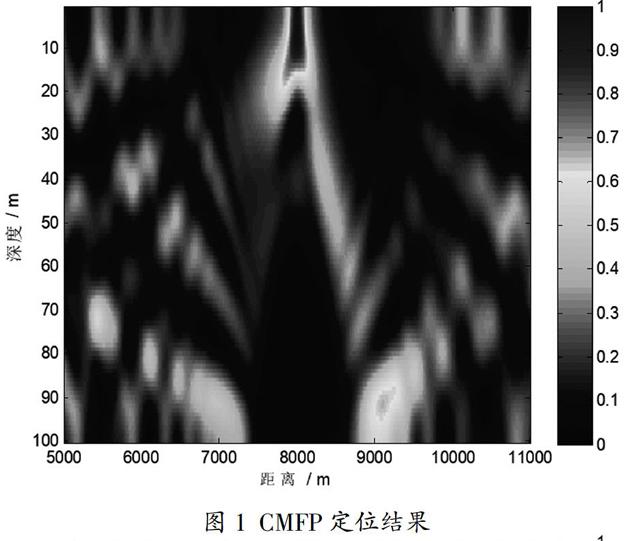
利用所提出的干扰噪声源抑制方法,设计最优权向量,使其对干扰噪声源所在方位响应尽量小。由于干扰噪声源和水下声源具有不同的声源级,水下弱声源的定位结果受强噪声的干扰严重。图1和图2分别给出了常规匹配场处理和DL-MVDR匹配场处理的定位结果,可以看出两种处理都无法对水下声源实现定位。图3给出了所提出干扰噪声源抑制方法的匹配场处理结果,可以看出所设计的最优权向量抑制了干扰噪声源, 实现水下弱声源的精确定位。
图1 CMFP定位结果
图2 DL-MVDR匹配场定位结果
4 结论
本文提出了一种基于匹配场处理的干扰噪声源抑制方法,用于解决水声传播信道中离散噪声源对水下声源定位干扰的问题。建立了具有离散噪声源抑制功能的匹配场处理器最优化模型,推导得出最优权向量。基于仿真数据,检验了所提出方法的有效性。当干扰噪声源和水下声源信号均为带限白噪声时,利用该方法可以抑制噪声源干扰,并实现水下弱声源的精确定位。
参考文献:
[1]李整林,张仁和,鄢锦,等.大陆斜坡海域宽带声源的匹配场定位[J].声学学报,2003,28(5):425-428.
[2]马远良.匹配场处理-水声物理学与信号处理的结合[J].电子科技导报,1996(4):9-12.
[3]任岁玲,葛凤翔,郭良浩.浅海宽带声源的匹配场定位[J].声学技术,2011,30(3):79-81.
[4]滕鹏晓,杨亦春,李晓东,等.多阵列数据融合的声定位研究[J].声学技术,2007,26(5):1064-1065.
[5]鄢社锋,马远良.匹配场噪声抑制:广义空域滤波方法[J].科学通报,2004,49(18):1909-1912.
