基于工程训练竞赛的智能物流车系统设计
2020-01-28李沛远张犇陈德欣赵春锋
李沛远 张犇 陈德欣 赵春锋


摘 要 以第六届全国大学生工程训练综合能力智能物流车组别的竞赛命题为背景,设计开发符合竞赛要求的智能物流车。通过机械手和物流车底盘机械设计、执行机构控制电路设计、AGV导航算法规划程序设计等,设计的智能物流车具有自主移动、定位、二维码读取抓取任务顺序、颜色识别、物料抓取与搬运、路径规划等功能。经过竞赛实践,取得不错的成绩,提供了一种有效的智能物流车设计方案。
关键词 工程训练;综合能力竞赛;智能物流车;二维码;机械手
中图分类号:G642 文献标识码:B
文章编号:1671-489X(2020)14-0025-03
1 引言
全国大学生工程训练综合能力竞赛是教育部高等教育司发文举办的全国性大学生科技创新实践竞赛活动,竞赛过程包括理论设计、实际制作、整车调试、现场比赛等环节,要求学生组成团队、协同工作,初步体会一个工程性的研究开发项目从设计到实现的全过程。本文以第六届全国大学生工程训练综合能力智能物流车组别的竞赛命题为背景,通过机械手和物流车底盘机械、执行机构控制电路、AGV导航算法规划程序等设计,开发符合竞赛要求的智能物流车。
比赛场地三维示意如图1所示,结合企业的现场环境,设置原料区、加工区和成品区。初赛时,以挡板将场地一分为二,给定原料区、加工区和成品区的具体位置,物流车只能在挡板所围区域内活动。决赛时,场地中的挡板去掉,两个参赛物流车在场地整个区域内活动,原料区、加工区、成品区的位置可以在整个场地范围内设置。物料有三种颜色,分别是红、绿、蓝,三种不同颜色随机放置在物料区。任务编码被设置为1、2、3三个数字的组合,如123、321等,采用二维码图片展示。其中,1表示红色,2表示绿色,3表示蓝色,数字组合表明物料搬运过程中不同颜色物料的搬运顺序。加工区和成品区均由三种颜色的同心圆和十字线构成,物料需要准确搬运到加工区或成品区对应的颜色区域内。
2 系统组成方案
智能物流车的整个系统分为机械结构、控制电路系统、AGV导航算法程序等三部分。系统结构组成示意图如图2所示。单片机控制器是整个智能物流车的控制核心,负责各传感器数据获取以及人机接口设置与显示,同时控制机械臂的抓取与放置操作,最重要的是根据场地黑色方格线进行路径导航与行走控制。
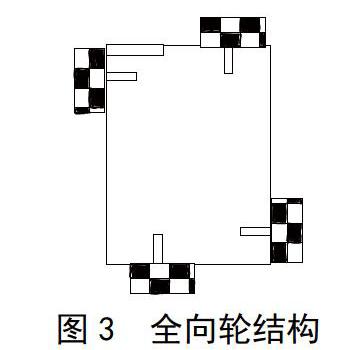
物流车行走机构方案 物流车在场地行走过程中需要进行机械臂抓取和放置操作。比赛中,抓取和放置位于物流车的两个侧面,也就是机械臂的操作半径要大于180°。此时,物流车底盘不需要旋转90°,也就是说,在整个物料抓取和放置过程中,物流车始终保持一个方向即可。若机械臂操作旋转半径小于180°,则小车需要旋转90°,实现抓取、行走和放置操作。而且场地循迹为黑色方格线,因此,物流车不适合做成两轮差速结构和普通的舵机转向控制的两驱车模结构。根据场地特点和运行要求,采用四全向轮结构或四麦克纳姆轮结构的物流车底盘(如图3、图4所示),车轮部分或全部采用螺旋弹簧安装在车架下面,当车轮发生跳动时,其他车轮不受影响,可有效防止轮胎防滑。对于新购得的轮胎橡胶,表皮应用砂纸摩擦以增加表面粗糙度,进行防滑处理。
机械手设计方案 机械手采用关节坐标型机械臂,示意图如图5所示,可有3~4个关节动作和一个手抓动作,均使用舵机进行控制。机械手整机分为臂座、大臂、小臂和手抓,以保证到达工作空间的任意位置,手抓以实现末端操作的任意空间姿态。臂部的运动使得臂座的结构和受力较复杂,臂座采用大滚动轴承固定于物流车底盘,示意图如图6所示。本设计中,为满足机械臂大于180°转动范围,臂座回转运动采用270°20 kg舵机控制。关节坐标结构简单,采用铝合金和亚克力板制作,密度小、重量轻,能够满足整个机械手的回转的灵活性和定位的准确性。肘关节和手抓主要考虑通用性与互换性,由于决赛时抓取物料形状有改变,手抓结构要在短时间内重新设计以达到快速适应新物料的需要。
3 物料颜色与任务二维码识别
智能物流搬运车首先采集搬運任务编码,初赛时为尺寸80 mm×80 mm的二维码,决赛时通过Wi-Fi网络通信获取(任务编码均通过现场抽签确定)。同时,需要采集赛场上原料区物料颜色,确定需要搬运的物料位置和搬运顺序。加工区和成品区均由不同颜色的同心圆和十字线构成,每组同心圆和十字线为同一种颜色,加工区和成品区的同心圆颜色需要智能物流车自行甄别。
整个过程中,需要对原料区物料、加工区和成品区的同心圆进行颜色识别。电磁类传感不可取,灰度摄像头可作物体形状判断,但不能识别物体颜色。因此,选用彩色摄像头进行颜色识别,方便二次开发的平台有可安装彩色镜头的嵌入式模块OpenMV(图7)、彩色USB摄像头结合树莓派核心板。而开源视觉传感器pixy2基于色度的颜色滤波算法(hue-based color filtering algorithm)来检测物体,但是不开放二次开发环境,对于本竞赛场合不适合。TCS3200、TCS34725颜色感应芯片采用多个颜色感应光电二极管组成,感应距离在1 cm以内,且易受环境光线干扰,因此对此竞赛中物料与放置靶纸同心圆颜色识别效果不佳。
OpenMV采用STM32H7处理器,主频400 MHz,是一个开源、低成本、功能强大的机器视觉模块。采用Python语言对OpenMV进行二次开发,达到机器视觉功能,以此来实现检测、产品筛选、跟踪固定标记物等。对二维码识别除了可以使用二维码识别模块(图8)外,也可使用OpenMV进行二维码识别。
OpenMV中,颜色识别时采用寻找色块函数image.find_
blobs(),该返回一个包含多个blob对象的列表blobs,每个blobs对象包含一个色块的信息,再通过查找颜色代码与颜色做比较,获得物料颜色和同心圆颜色。使用img.find_
qrcodes()函数对采集图像进行二维码识别,查找ROI(region
of interest)内的所有二维码并返回一个image.qrcode对象的列表。为使二维码一次识别成功,若二维码图像存在畸变,可以更换为无畸变镜头消除畸变,或使用sensor.set_
windowing函数在镜头中心放大,使用image.lens_corr函数消除镜头的桶形畸变等。使用code.payload()返回二维码字符串,并将二维码数据发送至主控单片机。
4 物流车AGV导航算法
智能物流车的整个活动区域场地地面为浅黄色亚光人造板或合成革铺就而成,上面有间隔为300 mm的黑色方格线,经线为线宽20 mm的单线,纬线线宽为15 mm+10 mm(间隔)+15 mm的双线(如图1所示),用于机器人行走的地面坐标位置判断。智能物流机器人从出发区移动到二维码显示板前读取二维码,然后判别原料区物料的颜色顺序;再移动到原料区,按任务码顺序依次将物料准确搬运到加工区对应的颜色区域内(一次只能搬运一个物料到加工区,不允许将物料存放在机器人上)。将物料搬运至加工区后,第二次识别二维码任务码,再按照任务码顺序再次将物料从加工区依次搬运到成品区对应颜色的位置上。完成任务后,物流机器人返回出发区。
智能物流机器人执行任务过程中需要到达指定的地点执行扫码、颜色识别、抓取、放置等不同任务。这些地点也就是智能物流车相对于出发区的全局坐标Pi(xi,yi),存储于主控单片机程序中。在物流机器人底盘上安装横向和纵向的灰度传感器(如图9所示),获得物流机器人行走的方向和位置判断。同时,在小车底盘安装横向和纵向测距传感器,实时测量物流车相对于活动区域外围挡板距离,对黑色循迹结果进行修正。灰度传感和测距修正在实际比赛中获得较好的效果。
5 结语
本文以第六届全国大学生工程训练综合能力智能物流车组别的竞赛命题为背景,通过机械手和物流车底盘机械设计、执行机构控制电路设计、AGV导航算法规划程序设计等,设计的智能物流车具有自主移動定位、识别二维码任务顺序、物料颜色识别、机械手抓取与搬运、路径规划等功能。本文所述的整体方案,经过竞赛实践验证,取得较好的成绩,为一套合理完整的硬件选择方案。■
参考文献
[1]关于发布第六届全国大学生工程训练综合能力竞赛命题的通知[DB/OL].[2018-07-13].http://www.gcxl.edu.cn/info/1049/1541.htm.
[2]崔辰鹏,金钰飞,钱晓明,等.AGV视觉导向Hough变换算法的FPGA硬件实现[J].工业控制计算机,2010(6):41-42.
[3]朱春伟,刘伦乾,甘海云,等.基于AGV的工艺装备集成开发与研究[J].内燃机与配件,2018(6),13-14.
[4]刘伟,彭琛.基于超声波测距的智能小车研究[J].自动化应用,2016(11):19-21.
