上肢康复机器人自适应离散滑模控制
2020-01-16王婕李荣利张高巍郭士杰
王婕 李荣利 张高巍 郭士杰

摘要 针对上肢外骨骼系统的非线性和不确定性特点,提出了一种基于增强型趋近律设计的自适应离散滑模控制方法。首先,建立5自由度上肢康复系统离散模型,便于计算机直接对外骨骼进行控制。然后,采用幂函数、指数函数和差分函數设计了增强型趋近律,保证跟踪误差的快速收敛。基于离散模型和增强型趋近律,设计了自适应离散滑模控制器。自适应控制可实现对控制增益的在线调节,减小准滑动模态的边界层厚度,抑制外部干扰影响和滑模抖振。基于Lyapunov稳定理论,分析了所设计的控制器对闭环系统的稳定性,并对控制效果进行了仿真验证。
关 键 词 外骨骼;趋近律;离散滑模控制;自适应控制;轨迹跟踪
中图分类号 TP242.6 文献标志码 A
Abstract In order to solve the problems caused by nonlinearity and uncertainty in the motion control of the upper extremity exoskeleton system, an adaptive discrete sliding mode control scheme has been proposed based on an enhanced reaching law. First, a discrete model of a five-degree-of-freedom upper limb rehabilitation system is established to make it convenient for a computer to perform control directly. Then, an enhanced reaching law is designed by utilizing the power function, the exponential function as well as the difference function to ensure a fast convergence of tracking errors. Based on the discrete model and the enhanced reaching law, an adaptive discrete sliding mode controller is designed. The control gains are regulated online and the boundary-layer of quasi-sliding mode is reduced by utilizing the adaptive control method. Furthermore, the influence of external disturbances and chattering are suppressed. The stability of the controller in the closed-loop system that simulates a five-degree-of-freedom upper limb rehabilitation system is analyzed by using Lyapunov stability theory and the control performance is confirmed by simulation.
Key words exoskeleton; reaching law; discrete sliding mode control; adaptive control; trajectory tracking
0 引言
外骨骼机器人是一种可穿戴的智能机电装置,可为穿戴者提供助力,使其能够完成繁重的体力劳动,也可用作医疗康复装置,通过体重支撑或动作辅助改善肢体残障人员的活动能力,或对神经障碍患者进行康复训练,具有重要的军事、劳动作业、医疗应用价值,是目前机器人领域的研究热点。外骨骼与穿戴者构成典型的人机共融系统,具有变量多、非线性强、不确定性大等特点,易受机械误差、信号传感误差及外部干扰等因素的影响。为保证人机动作的协调性,外骨骼的设计不但要在运动学与动力学上与人体匹配,还要具备人机交互能力和自适应能力,以确保穿戴者的安全与舒适。常用的外骨骼控制策略包括操作者控制、肌电控制、预编程控制、主从控制、直接力反馈控制、地面反作用力控制、灵敏度放大控制等。但不管采用哪种控制策略,末端运动控制多采用最优控制[1]、鲁棒控制[2]、PID控制[3]等方法,这些方法对于非线性多自由度上肢外骨骼的运动控制,有一定的局限性,无法实现人机之间的无缝协调。
本文所研究的上肢外骨骼机器人是一个单臂5自由度系统。对于5自由度机械臂的非线性控制问题,文献[4]提出了一种PID控制和迭代学习控制相结合的控制方法,用于机械臂执行重复任务,该控制方法对于周期信号的处理具有较好的效果,但非周期运动的误差累积会严重影响系统的动态特性。为提高系统的响应能力,实现快速跟踪和克服系统外部干扰,文献[5]设计了一种基于遗传算法的滑模控制器。文献[6-7]提出了非线性自适应控制策略,能够使执行器在不确定性干扰下实现较好的动态跟踪,但需设计离散滑模控制器,以保证信号采集的可靠性和精度。然而,传统的离散滑模控制器抖振难以避免,为解决这一问题,很多学者进行了研究。文献[8]设计了一种基于指数趋近律的离散自适应滑模控制器,采用连续函数替代符号函数,降低控制抖振。文献[9]以5自由度外骨骼机器人为研究对象,设计了一种无模型自适应滑模控制器,使机器人系统在不确定条件下实现对期望轨迹的跟踪。文献[10]提出了一种自适应滑模控制方法,可有效降低抖振,但该方法收敛时间长,实时性较差。
针对传统方法在非线性、不确定系统的运动控制中所存在的问题,以及离散滑模控制的抖振和收敛速度慢等问题,本文通过将离散滑模控制与自适应控制相结合,设计一种基于自适应离散滑模的增强趋近律,该趋近律采用幂函数、指数函数和差分函数,以实现跟踪误差的快速收敛。当输出的关节位置远离滑模面时,控制增益变大;当关节位置状态接近滑模面时,控制增益减小,从而达到既快速响应,又降低抖振的目的。
1 机器人动力学方程的转换及其动态线性化
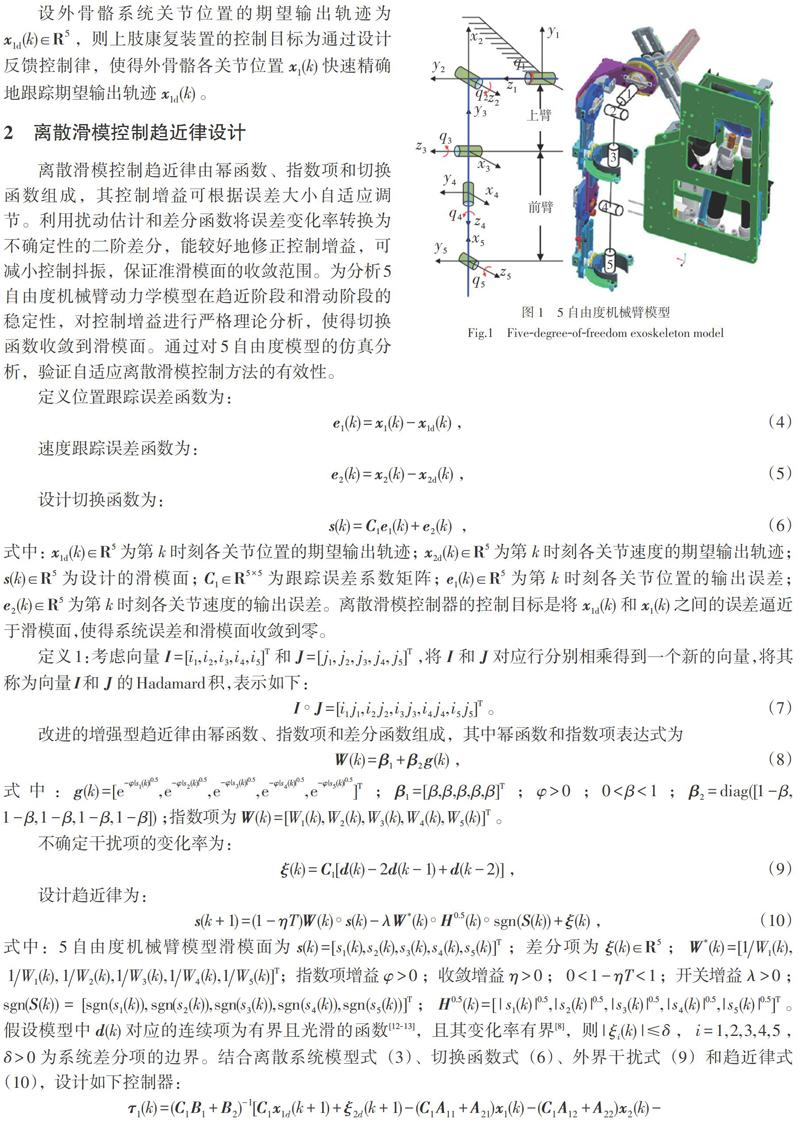
根据人体上肢运动规律和解剖学原理,上肢外骨骼机器人可选取5个关节,即肩关节的外展内收,肩关节的屈伸,肘关节的屈伸,腕关节的屈伸,以及腕关节的内旋外旋。具体结构如图1所示。外骨骼系统的基本工作原理是通过获得人体手臂运动信号,实时调整机械臂各个关节的力矩位置和角度,实现对手臂运动的快速精确跟踪。该5自由度刚性机械臂系统的标称动力学方程描述为如下模型[11]:
将式(1)非线性机器人标称动力学方程转换为如下状态空间表达式:
此状态空间方程表示在控制输入[τ]的作用下,系统输出各关节的位置、速度和加速度。控制系统的采样周期为0.001 s,将系统式(2)线性离散化,并引入由模型不确定参数和外部扰动组成的总干扰矩阵,则离散后的状态方程为
设外骨骼系统关节位置的期望输出轨迹为[x1d(k)∈R5],則上肢康复装置的控制目标为通过设计反馈控制律,使得外骨骼各关节位置[x1(k)]快速精确地跟踪期望输出轨迹[x1d(k)]。
2 离散滑模控制趋近律设计
离散滑模控制趋近律由幂函数、指数项和切换函数组成,其控制增益可根据误差大小自适应调节。利用扰动估计和差分函数将误差变化率转换为不确定性的二阶差分,能较好地修正控制增益,可减小控制抖振,保证准滑模面的收敛范围。为分析5自由度机械臂动力学模型在趋近阶段和滑动阶段的稳定性,对控制增益进行严格理论分析,使得切换函数收敛到滑模面。通过对5自由度模型的仿真分析,验证自适应离散滑模控制方法的有效性。
3 离散滑模控制趋近律的稳定性分析
3.1 离散滑模控制趋近律的可达性
离散滑模控制趋近律的到达条件为
3.2 离散滑模控制趋近律的稳定性条件
3.2.1 滑模裕度外的收敛性分析
当离散模型式(3)处于距离滑模面[Δnn]外的衰减带时,通过分析以下2种情况,推得满足系统收敛的条件,得出较小的准滑动模态的裕度。
3.2.2 滑模裕度内的收敛性分析
通过对比式(10)和式(30),可知基于幂函数和指数项的趋近律能够自动调节控制增益,在距滑模面较远时,控制增益相对较大;在靠近滑模面时,控制增益较小,此时幂函数和指数项失效,控制器将转为传统的滑模趋近律控制方法。
图2为外骨骼系统各关节位置跟踪轨迹图。由图可知,在自适应离散滑模控制律[τ(k)]的作用下,外骨骼系统关节位置曲线[x1(k)]能够在0.02 s内实现对期望轨迹[x1d(k)]的准确跟踪。因此,本文所提出的控制律能够保证外骨骼系统在干扰存在的情况下对期望轨迹的快速准确跟踪。
为了进一步说明所提控制方法的收敛性能,图3给出了各关节位置的跟踪误差曲线。由图3可知,各关节跟踪误差在0.02 s以后维持在零附近,且误差在0.02内。表明闭环系统具有良好的动态性能和稳态精度。
5 结论
论文采用动态线性化方法将5自由度非线性机器人动力学模型线性化,结合自适应控制和滑模控制设计了自适应离散滑模控制器,基于幂函数、指数项和差分函数设计趋近律对系统的稳定性进行了严格分析。5自由度模型仿真结果表明,在不确定干扰存在的情况下,能够使得上肢外骨骼系统快速精确跟踪期望轨迹,且具有较好的动态响应性能,可最大限度地按照穿戴者的意愿完成手臂各关节运动。具有以下2个主要特点。
1)本文采用离散滑模控制器,能够将计算机仿真直接应用于实际工程中,省略离散化过程。此外,建立5自由度离散模型,在系统受采样频率的限制时,可缓解系统状态反复穿越滑模面产生的抖振,系统控制精度高、可靠性好。
2)与传统的趋近律相比,基于幂函数、指数项和差分函数设计的增强型趋近律能减小准滑动模态的裕度,加快收敛速度。利用离散滑模控制和自适应控制相结合的方法,保证鲁棒性的同时,降低了控制抖振,使得控制器具有较好的跟踪性能。
参考文献:
[1] HUNT K J,MUNIH M,DE N DONALDSON N. Feedback control of unsupported standing in paraplegia:part I:optimal control approach[J]. IEEE Transactions on Rehabilitation Engineering,1997,5(4):331-340.
[2] HUNT K J,JAIME R P,GOLLEE H. Robust control of electrically-stimulated muscle using polynomial H∞ design[J]. Control Engineering Practice,2001,9(3):313-328.
[3] YU W,ROSEN J. A novel linear PID controller for an upper limb exoskeleton[C]//Decision and Control (CDC),2010 49th IEEE conference:IEEE,2011:3548–3553.
[4] BALASUBRAMANIAN S,WEI R,PEREZ M,et al. An exoskeleton robot for assisting rehabilitation of arm functions[C]//Virtual Rehabilitation. Piscataway,New York:IEEE,2008:163-167.
[5] BABAIASL M,GOLDAR S N,BARHAGHTALAB M H,et al. Sliding mode control of an exoskeleton robot for use in upper-limb rehabilitation[C]// RSI International Conference on Robotics and Mechatronics ICROM. Piscataway,New York:IEEE,2015:694-701.
[6] MA H J,YANG G H. Adaptive logic-based switching fault-tolerant controller design for nonlinear uncertain systems[J]. International Journal of Robust and Nonlinear Control,2011,21(4):404-428.
[7] JIN X Z,YANG G H. Robust adaptive fault-tolerant compensation control with actuator failures and bounded disturbances[J]. Acta Automatica Sinica,2009,35(3):305-309.
[8] DU H B,YU X H,CHEN M Z Q,et al. Chattering-free discrete-time sliding mode control[J]. Automatica,2016,68:87-91.
[9] 李醒,王晓峰. 不确定机器人系统无模型自适应滑模控制方法[J]. 南京理工大学学报(自然科学版),2015,39(6):655-660.
[10] LIU J,LI H W,DENG Y T. Torque ripple minimization of PMSM based on robust ILC via adaptive sliding mode control[J]. IEEE Transactions on Power Electronics,2018,33(4):3655-3671.
[11] 劉金琨. 机器人控制系统的设计与MATLAB仿真[M]. 北京:清华大学出版社,2008.
[12] XU Q S,LI Y M. Micro-/nanopositioning using model predictive output integral discrete sliding mode control[J]. IEEE Transactions on Industrial Electronics,2012,59(2):1161-1170.
[13] ABIDI K,XU J X,YU X H. On the discrete-time integral sliding-mode control[J]. IEEE Transactions on Automatic Control,2007,52(4):709-715.
[14] SU W C,DRAKUNOV S V,OZGUNER U. An O(T/sup 2/) boundary layer in sliding mode for sampled-data systems[J]. IEEE Transactions on Automatic Control,2000,45(3):482-485.
[15] 刘金琨. 滑模变结构控制MATLAB仿真[M]. 北京:清华大学出版社,2005.
[16] KANG H B,WANG J H. Adaptive control of 5 DOF upper-limb exoskeleton robot with improved safety[J]. ISA Transactions,2013,52(6):844-852.
[责任编辑 付 婷 田 丰]
