高超声速飞行器尾迹转捩及其对雷达散射截面的影响
2020-01-08于哲峰陈旭明杨鹰部绍清谢爱民黄洁柳森
于哲峰,陈旭明,杨鹰,部绍清,谢爱民,黄洁,柳森
(中国空气动力研究与发展中心 超高速空气动力研究所,四川 绵阳 621000)
0 引言
近年来,世界各主要军事强国均大力发展高超声速飞行器,部分型号已经开始服役。高超声速飞行器的目标特性是研究预警探测系统对其探测、跟踪和识别性能的重要技术基础,对其进行研究显得越来越重要。在再入段,由于高超声速飞行器与空气强烈作用,飞行器周围的空气被急剧压缩,形成发光、电离的高温气体。在高温气体作用下,飞行器材料将被加热甚至出现热解、烧蚀。同时,由于高温空气和飞行器材料烧蚀产物的电离,在飞行体表面形成等离子鞘套,在其下游形成一条很长的等离子体尾迹,严重影响高超声速目标电磁散射特性。
从20世纪60年代开始,美国、前苏联等国投入大量人力和物力开展相关研究[1-7]。以美国通用汽车公司防御研究室(GM/DRL)为例,早在20世纪60年代至80年代,该研究室就利用弹道靶进行8 000多次试验,研究了高超声速模型流场结构、光辐射特性和电磁散射特性;20世纪80年代末、90年代初,该研究室对弹道靶设备进行了技术改造,以进一步提高设备的研究能力。Wilson[1-2]利用弹道靶的纹影显示技术,对尾流的转捩现象进行了大量实验研究,发现转捩的发生与物形雷诺数有密切关系:当雷诺数接近临界雷诺数时,转捩向下游的移动加快[3]。文献[4-8]的弹道靶试验研究证实,影响飞行器尾迹转捩的参数主要包括几何尺寸、飞行马赫数及飞行高度等。随着目标钝度比、飞行马赫数或飞行高度的增加,转捩位置前移,基于转捩位置xt的转捩雷诺数Ret是用于确定尾流转捩的常用参数[8-12]。在国内,也有学者利用弹道靶开展了相关研究,2005年,中国空气动力研究与发展中心对FD-18B自由飞弹道靶进行了全面改造,配置了X波段与Ka波段雷达、微波谐振腔系统、8 mm微波干涉仪、光辐射系统及弹道测量系统等测试设备。对高超声速目标尾迹的流场特性、电磁散射特性和光辐射特性开展了一系列试验研究[13]。
本文在中国空气动力研究与发展中心自由飞弹道靶上开展高超声速模型流场特性试验研究,测量不同马赫数和靶室压力下模型尾迹的流场结构和转捩位置,利用转捩准则对试验结果进行了分析。
1 高超声速尾迹转捩特性试验
高超声速模型尾迹转捩特性试验研究在中国空气动力研究与发展中心FD-18B自由飞弹道靶上开展,利用阴影照相系统获得了不同马赫数和靶室压力下钝锥模型尾迹的流场结构和转捩位置。
1.1 弹道靶试验设置
由于常规风洞存在来流不稳定以及洞壁和支架干扰流场等问题,国内外高超声速飞行器尾迹转捩试验主要在弹道靶上开展。弹道靶试验中,试验模型自由飞行,无支架干扰,背景噪声小;模型飞行速度可调,可较真实地模拟飞行速度;通过调整靶室压力可方便地模拟雷诺数等参数。因此,在弹道靶上开展边界层和尾迹转捩试验研究具有其他地面试验设备无法比拟和实现的优势,是全尺寸飞行试验与理论研究的桥梁,可用于验证理论计算与尾迹转捩准则等。图1所示为FD-18B弹道靶照片,开展试验时,φ25 mm口径二级轻气发射器发射模型和弹托,将模型发射到试验要求的飞行速度。在靶室的分离段完成弹、托分离,模型进入试验段。在试验段,靶室和真空系统提供模型飞行压力环境,模拟飞行高度。阴影照相系统实现目标流场的显示测量,弹道测量系统实现模型测速并为阴影照相系统提供同步时间触发信号。

图1 FD-18B 自由飞弹道靶Fig.1 FD-18B free flight ballistic range
1.2 尾迹转捩流场图像处理
阴影仪窗口上的基准线(见图2中的A、B、O、P线)及各窗口间的相对位置数据是进行流场照片数据处理的基础,这些特定的数据已经在系统设计与测量调试中确定。在进行流场显示时,这些基准线被同时拍摄在底片上,从而可确定底片所显示流场的缩放率。图2中,M点、H点为流场某处截面的上下边缘点;N点为关注的特征点。
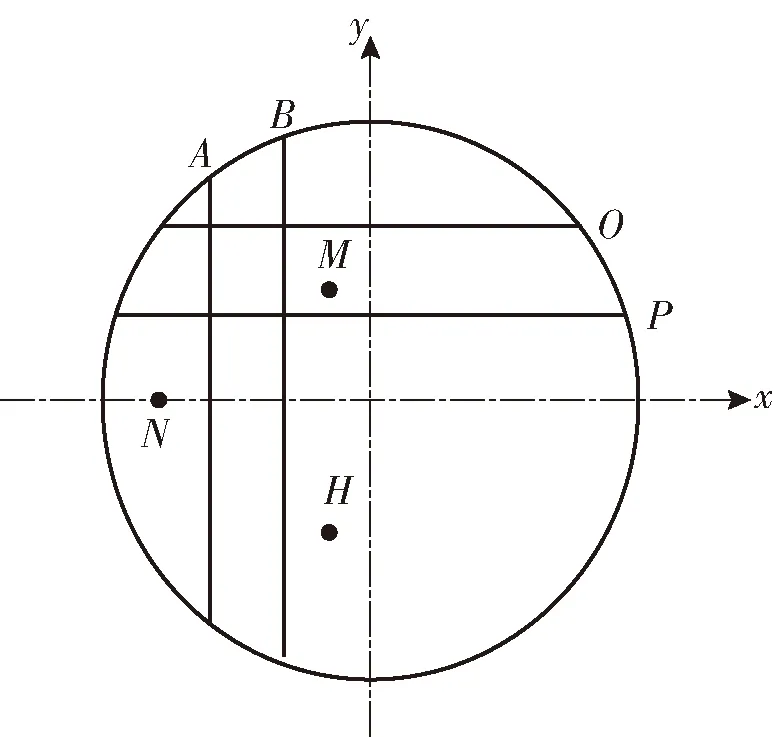
图2 基准线与流场图像相互关系Fig.2 Relationship between baseline and flow field image
流场显示的底片首先经过扫描仪扫描,获得的扫描图像经过图像处理软件可判读出流场中的判读点及各基准线的x轴方向、y轴方向坐标,通过基准线的缩放率能够很方便地得到流场各判读点距基准线的实际值。图2中,图像点M相对于A基准线的x轴方向距离为
(1)
式中:xM、xA、xB分别为图像判读得到的图像点或线的x轴方向坐标值;xAB为该窗口A与B基准线的实际测量值。假定图2中的M点、H点为流场某处截面的上下边缘点,则两点间的y轴方向距离(即该截面的尾迹宽度W)为
(2)
式中:yM、yH、yO、yP分别为图像判读中获得的M点、H点及O点、P点基准连线的y轴方向坐标判读值;yOP为该窗口O点与P点基准线的实际测量值。
采用类似方法,可进行模型在流场中攻角及尾迹转捩点的判读。弹道靶纹影显示技术对中性气体密度的横向梯度反应灵敏,对高超声速气流而言,当湍流刚出现时其气流脉动量小,流场气体密度脉动较弱,对阴影仪的显示灵敏度及光源均有较高要求,否则将使早期的湍流被掩盖。此外,当气体密度低到不足以产生光的折射(较高的飞行高度情况)或目标飞行中产生了自发光情况时,层流转捩的显示将非常困难。
2 试验结果分析与讨论
典型尾流流场结构如图3所示。高超声速气流绕球体或细长物体运动时,在物体头部前形成弓形激波或锥形波,并在物体表面附近形成边界层。边界层在物体后缘由于遇到强反压梯度气流或物体表面形状变化而从物体表面分离,形成自由剪切层。自由剪切层与物体之间是回流区,自由剪切层在回流区后部汇合后,由于气流方向的改变而形成颈部流,经过颈部的自由剪切层形成黏性内尾流,并在黏性内尾流外形成尾激波。
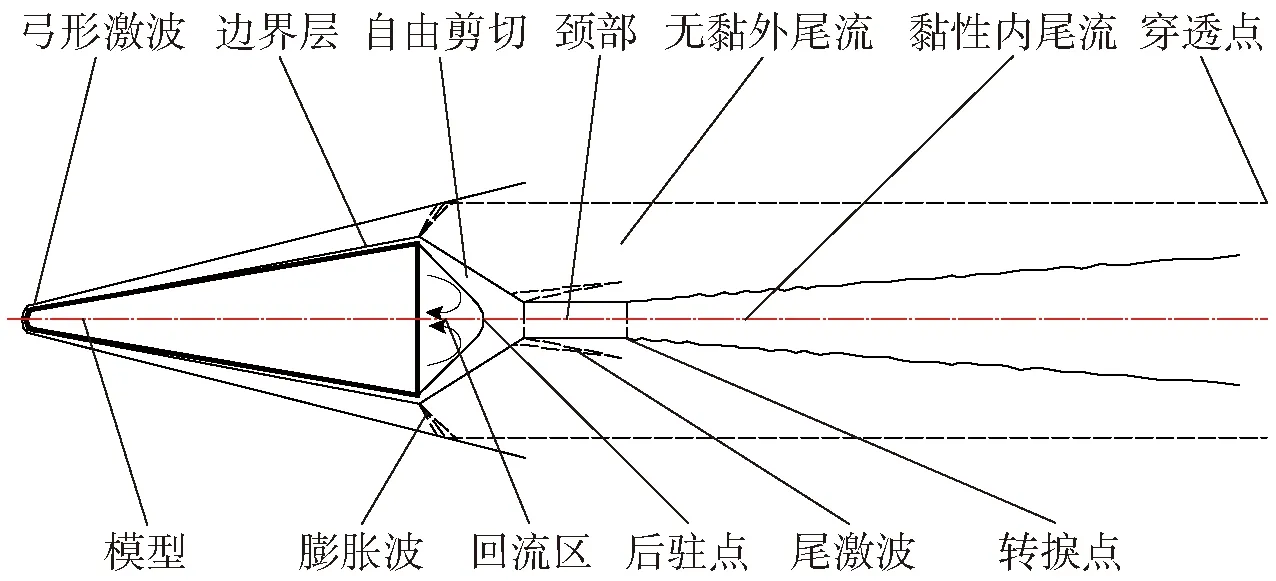
图3 钝锥流场理论模型Fig.3 Theoretical model of blunt conical flow field
2.1 尾迹转捩流场图像分析
自由飞弹道靶试验模型底部直径D=15 mm,钝度比(头部半径比底部半径)为0.134.典型高超声速模型流场照片如图4和图5所示,从图像中可以清晰地看到弓形激波、膨胀波、无黏外尾流和黏性内尾流等图1所示的流场结构特征。

图4 钝锥模型流场(飞行速度3.2 km/s,飞行压力60 kPa)Fig.4 Flow field of blunt conical model (3.2 km/s and 60 kPa)

图5 钝锥模型流场(飞行速度4.5 km/s,飞行压力20 kPa)Fig.5 Flow field of blunt conical model (4.5 km/s and 20 kPa)
从图4和图5中可见,在较高雷诺数下,黏性内尾流在流场某处失稳,并转捩为湍流。尾迹纹影照片显示出层流尾迹后出现一些稀疏的涡丝分布(或脉动),这时尾迹转捩开始,随着涡丝变密,层流过渡为湍流流动。转捩开始到发展为完全湍流的过渡过程随飞行雷诺数等参数变化,在判读时,定义尾迹出现第1个脉动的位置为转捩位置。
转捩的发生与物形雷诺数有密切关系。在高雷诺数下,黏性内尾流在靠近颈部处转捩为湍流;当雷诺数减小时,转捩位置沿流场向下游缓慢移动,在离物体较远处开始转捩;当雷诺数接近临界雷诺数时(Re∞,D≈105),转捩向下游移动加快。依据大量纹影结果,在高超声速下从层流到湍流的转捩从未在底部回流区出现过,转捩或者出现在边界层,或者出现在颈部下游的位置。底部流是具有非常稳定的自由剪切层流动,当转捩出现在边界层上时层流从颈部开始变成湍流。
2.2 尾迹转捩位置试验与理论分析对比
尾迹转捩一般可以由半经验公式来预测,国内外较成熟的尾流转捩经验公式较多,但差别较小。本文利用文献[8]给出的一种预测尾迹转捩点拟合公式:
(3)
式中:Ma∞为来流马赫数。
在弹道靶上开展系列实验,分析飞行马赫数、压力和雷诺数等对高超声速模型转捩位置的影响,典型结果如表1所示。针对表1对应的试验状态,利用(3)式可以得到不同试验状态下尾迹的转捩位置。
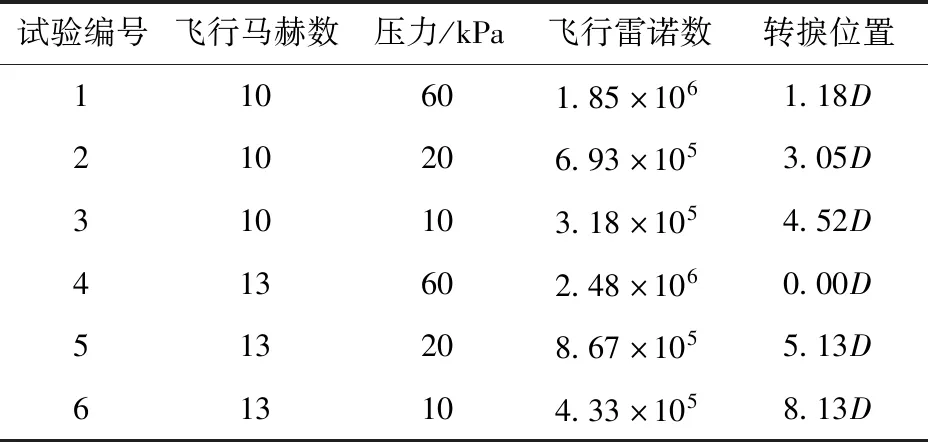
表1 模型尾迹转捩位置测量数据Tab.1 Measured data of wake transition position
在不同Ma∞下,转捩位置预测值与试验值对比如图6和图7所示。由图6和图7可见,二者变化趋势与数值大小基本一致。在来流马赫数Ma∞相同的情况下,雷诺数Re∞越大、转捩越靠前。当Re∞相同时,Ma∞越小转捩位置越靠前。
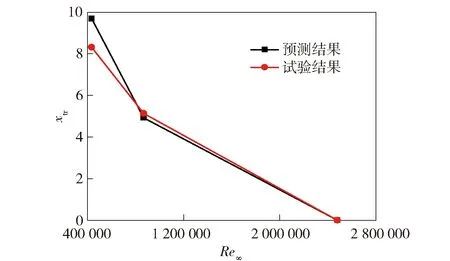
图6 尾迹转捩位置与飞行雷诺数的关系(Ma∞≈13)Fig.6 Relationship between wake transition position and flight Reynold number (Ma∞≈13)

图7 尾迹转捩位置与飞行雷诺数的关系(Ma∞≈10)Fig.7 Relationship between wake transition position and flight Reynold number (Ma∞≈10)
3 典型状态下转捩位置随弹道变化
在第2节理论分析和试验验证的基础上,利用尾迹转捩点预测公式分析钝锥飞行器转捩位置随弹道变化情况,假设钝锥飞行器在飞行高度为70~40 km时飞行速度随高度的变化曲线如图8所示。
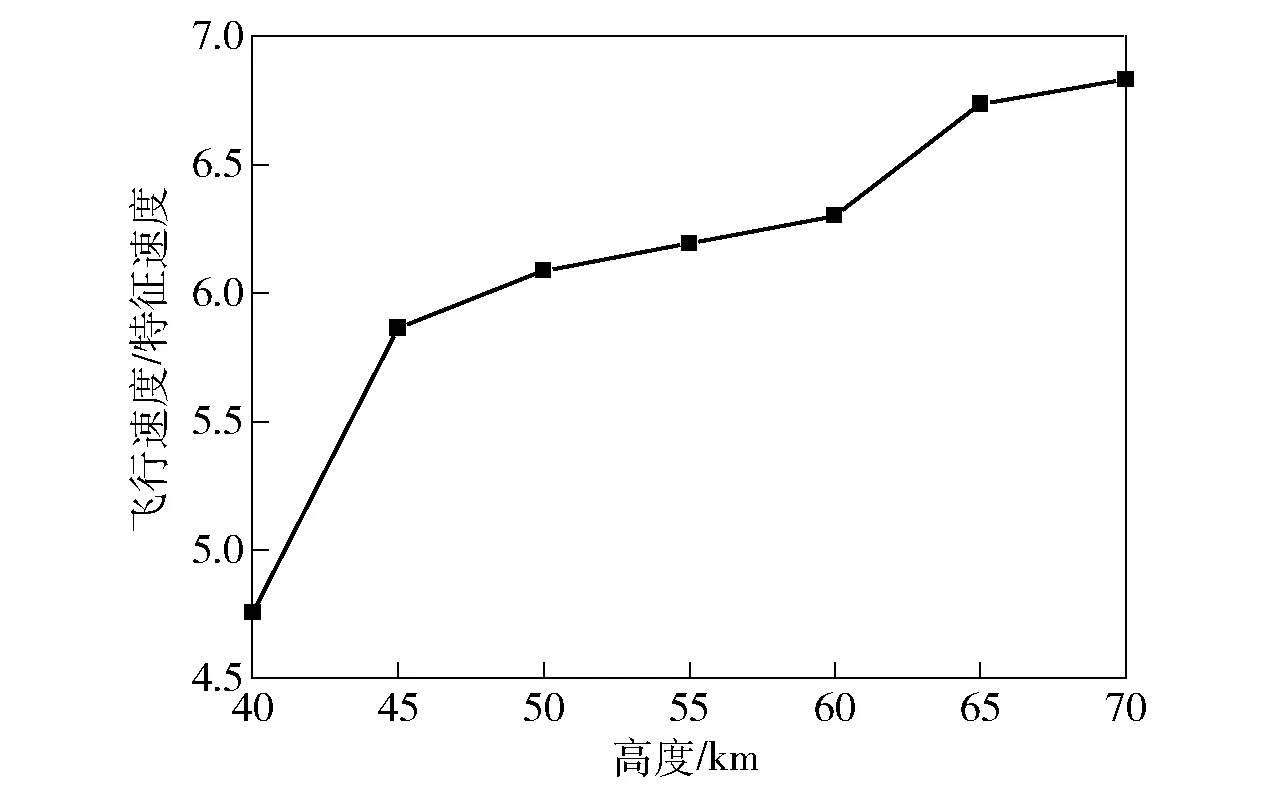
图8 飞行速度随高度变化曲线Fig.8 Flight velocity versus height
获得的转捩位置随高度的变化曲线如图9所示。从图9中可见:当飞行器再入大气层时,刚开始大气层非常稀薄,尾迹完全处于层流状态,随着飞行高度的降低,尾迹在远尾处开始出现湍流。当飞行高度为70 km时由估算公式得到转捩位置为247.5D,近尾和绝大部分远尾处于层流状态,只有部分远尾处于湍流状态。当飞行高度降低时,飞行器尾迹转捩位置逐渐前移。当飞行高度为40 km时,转捩位置为4.9D,此时只有部分近尾处于层流状态,远尾完全变成湍流。如果飞行高度进一步降低,则整个尾迹将完全处于湍流状态。
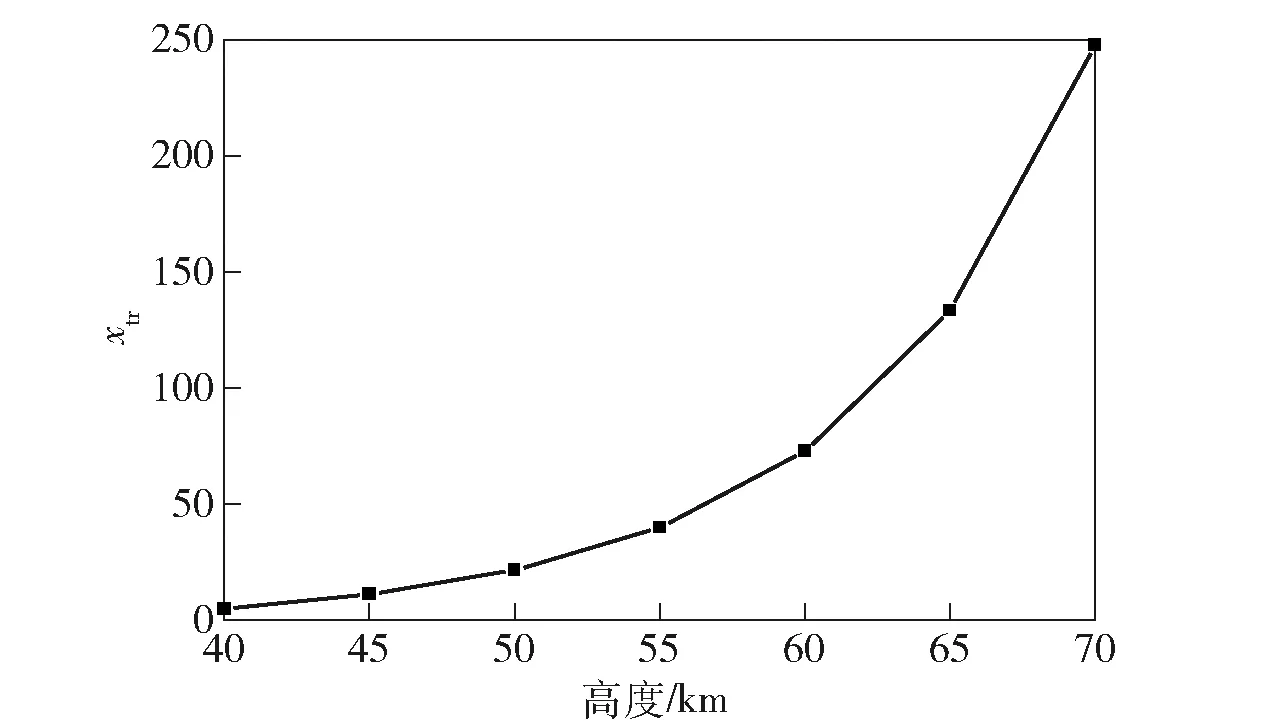
图9 转捩位置随飞行高度变化曲线Fig.9 Transition position versus height
4 尾迹转捩对RCS的影响
对于弹道如图8所示的钝锥飞行器,在通常关心的高度70~40 km范围内,头部和身部绕流电离流场一般处于层流状态,尾迹流场一部分是层流、一部分是湍流[13-15]。层流的电磁散射一般是镜面散射,其后向散射的比例很小。湍流尾迹特别是当尾迹的等离子体频率小于入射波频率时为亚密湍流尾迹,电磁散射的强度通常要比层流大得多。因此在再入过程中,飞行器RCS有可能出现由转捩引起的突增现象。当飞行高度小于20 km时,由于大气密度增加,尾迹组分复合反应占主导,等离子体尾流场电子密度降低,碰撞频率增加,尾迹的RCS下降。
从雷达图像上分析,当飞行高度大于70 km时,飞行器的本体电磁散射占主导地位,能够获得清晰的RCS像,当飞行高度小于70 km时,在飞行器周围形成等离子体鞘套,在远尾处形成湍动等离子体尾迹。由于等离子体鞘套具有一定的速度分布,展宽了飞行器雷达回波,雷达成像变得模糊,并且在远尾处出现湍动尾迹的雷达像。随着高度的降低,转捩位置前移,尾迹的雷达像逐步靠近飞行器本体的雷达像,并最终与飞行器本体RCS像融为一体。当飞行高度小于20 km时,尾迹电子密度逐渐下降,但是等离子体鞘套头身部电子密度非常强,此时雷达像的模糊主要是由等离子体鞘套引起的。
5 结论
本文在FD-18B弹道靶上开展了高超声速模型转捩位置试验研究,测量了不同马赫数和靶室压力下模型尾迹的转捩位置。利用转捩准则对试验结果进行了分析,研究了不同参数对转捩位置的影响规律。沿弹道分析了典型高超声速飞行器再入过程中转捩位置随高度的变化规律,探讨了转捩对高超声速飞行器RCS特性产生的影响。主要得到如下结论:
1)对于相同的马赫数,雷诺数越高,转捩位置越靠近飞行器底部;对于相同的雷诺数,马赫数越小,转捩位置越靠近飞行器底部。
2)当飞行器再入大气层时,刚开始大气层非常稀薄,尾迹完全处于层流状态;随着飞行高度的降低,尾迹在远尾处开始出现湍流。如果飞行高度进一步降低,则整个尾迹将完全处于湍流状态。当飞行高度小于20 km时,由于大气密度增加,尾迹化学组分复合过程占主导,等离子体尾流场电子密度降低,碰撞频率增加。
3)等离子体鞘套和尾迹对高超声速飞行器RCS的影响非常复杂,将改变RCS的大小,使雷达成像变模糊,甚至产生假目标。