浅水中低速小半径回转船舶水动力数值研究*
2019-12-27王小龙邹早建刘敬贤
王小龙 邹早建 夏 立 刘敬贤
(上海交通大学船舶海洋与建筑工程学院1) 上海 200240) (上海交通大学海洋工程国家重点实验室2) 上海 200240) (武汉理工大学航运学院3) 武汉 430063)
0 引 言
长期以来,关于船舶直航、斜航运动的研究远多于关于船舶回转运动的研究,然而,完整的操纵性预报离不开船舶回转性能的预报.因此,准确预报船舶回转性能依然需要投入更多的时间和精力.
由于船舶低速航行时间占整个生命周期的很小一部分,船舶的低速运动很容易被忽略,特别是港口附近的低速大漂角回转运动.为提供预报港口操纵运动所需的基础数据,Yumuro[1]使用Esso Osaka船模进行了一系列约束模试验和螺旋桨敞水试验等,并给出了各工况下船舶所受水动力的试验结果.Yoshimura等[2]提出了一种简单又通用、可适用于港口回转操纵的数学模型,并通过与多种试验结果对比,对该模型的预报精度进行了验证.Wang等[3]以Esso Osaka为研究对象,对限制水域中船舶的回转流场进行了模拟,并得到了船舶的相关受力.卢锦国等[4]应用基于RANS方法的数值方法,采用旋转坐标系法,对潜艇的回转性能进行了研究.Toxopeus等[5]也是基于该数值方法,分别使用商业和定制求解器对不同湍流模型、不同网格拓扑结构下的稳定回转流场进行了数值模拟.Broglia等[6]通过求解非定常RANS方程研究了不同螺旋桨模型对船舶回转预报的影响.Zhang等[7]也是基于数值方法对不同回转半径、不同漂角工况下的多种潜艇的回转运动进行了研究.吴召华等[8]提出了体积力模型来表达螺旋桨的作用,并数值预报了回转船舶的受力和力矩.Ortolanind等[9]研究了船舶在直航和回转工况下螺旋桨桨轴的径向受力.Dubbioso等[10]对全附体双桨船的回转能力进行了分析,并且还对比了单桨配置和双桨配置船舶的回转能力.Chen等[11]采用DES模型对不同漂角工况下、船舶的低速回转运动进行了数值模拟,并提取了船舶运动过程中的受力及流动中的涡结构.
浅水中低航速船舶在不同漂角工况下的小半径回转运动常见于港湾、入海口等航行水域,该水域的环境复杂,船舶航行其中,操纵难度大,碰撞、触礁、搁浅等事故发生风险也高,准确预报该水域不同航行工况下船舶的受力对于提高船舶航行安全意义重大.
1 控制方程
在描述船舶运动时,引入两个右手坐标系,分别为大地坐标系O-XYZ和随船坐标系o-xyz,见图1.其中,大地坐标系的原点O设在船舶回转运动的中心,O-XY设于无扰自由面上,Z轴垂直向上;随船坐标系的原点o设于船舶重心位置,x轴指向船首,y轴指向右舷.
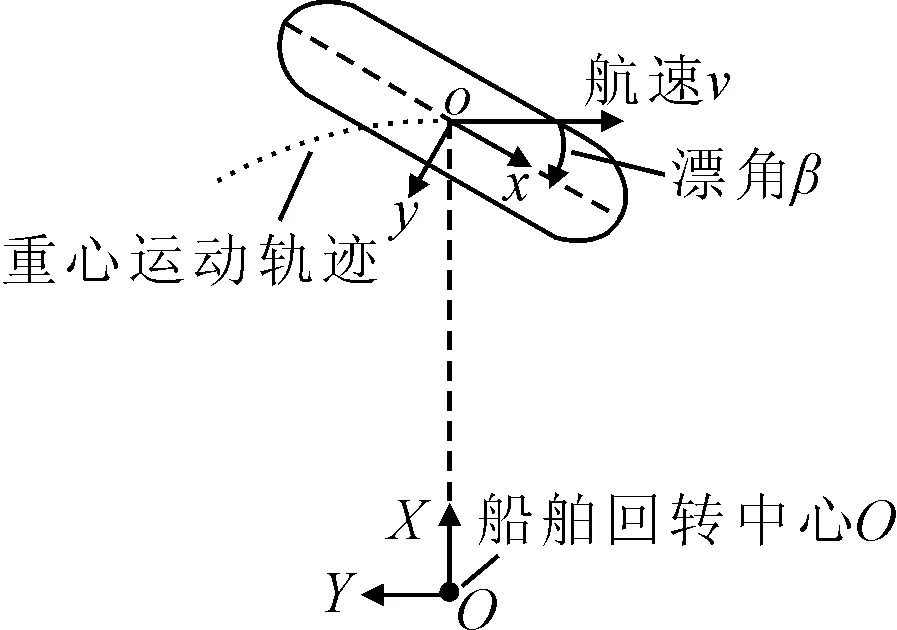
图1 坐标系
控制方程为连续性方程和N-S方程,通过RANS方法求解时,流体控制方程为
(1)
(i=1,2,3)
(2)
式中:ui,uj和p均为时均量;ρ为流体质量密度;ν为流体运动学黏性系数;Tt为雷诺应力张量.
大地坐标系下船舶的回转运动属于非定常问题,对此,引入旋转坐标系将大地坐标系下的非定常问题转化成旋转坐标系下的定常问题.旋转坐标系为非惯性系,其原点位于回转中心,并以船舶回转的角速度进行旋转,船舶此时相对于该系静止,于是惯性系上的非定常问题就转化为非惯性系下的定常问题.经坐标系转化后的流体的控制方程为
(3)
(i=1,2,3)
(4)
式中:ω为旋转角速度;r为旋转参考系中位置矢量;δij为克罗内克符号.
2 计算设置
2.1 计算方法选择
求解器选用STAR-CCM+,湍流模型采用k-ε模型,采用有限体积法对控制方程进行离散,采用标准格式对压力项进行差分;速度、动量及湍流参量采用2阶迎风差分格式进行离散;压力与速度的耦合问题应用SIMPLE法处理;离散方程运用Gauss-Seidel法求解.
2.2 研究对象选择
研究对象为Esso Osaka油船,其主尺度参数见表1,船体几何见图2.船舶运动过程中,所受横向力为Fy,所受转首力矩为MZ;fy,fz分别为量纲一的量的横向力系数和转首力矩系数,定义为
(5)

(6)
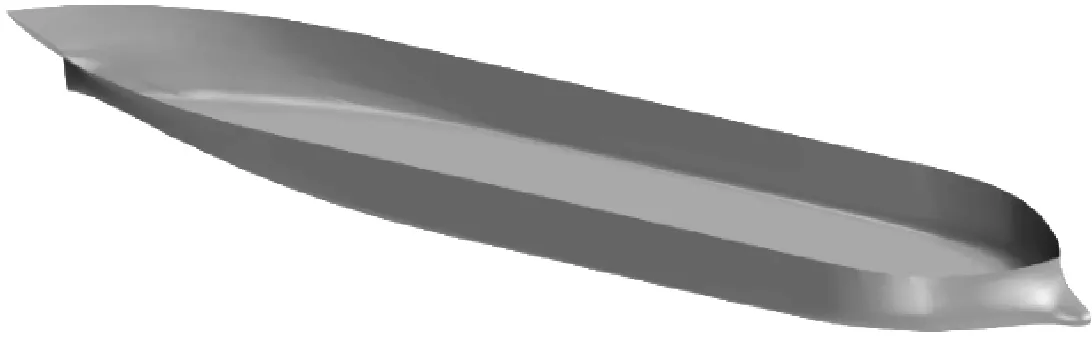
图2 船体几何形状
2.3 计算域边界及网格设置

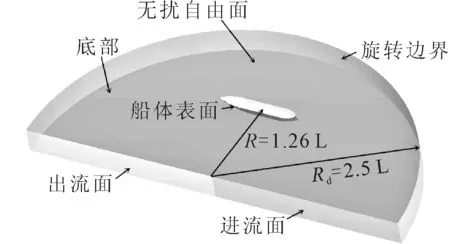
图3 计算域
网格生成器选择切割体网格,并执行棱柱层加密和自动表面修复,其中棱柱层延伸比为1.5,面网格延展比为1.3.第一层网格尺寸y=3.625×10-5m,95%以上船体表面y+值在5以内.为充分捕捉船体周围流场,采用三重网格对船体附近进行加密,并在船体首尾处用更细的网格加密,见图4.
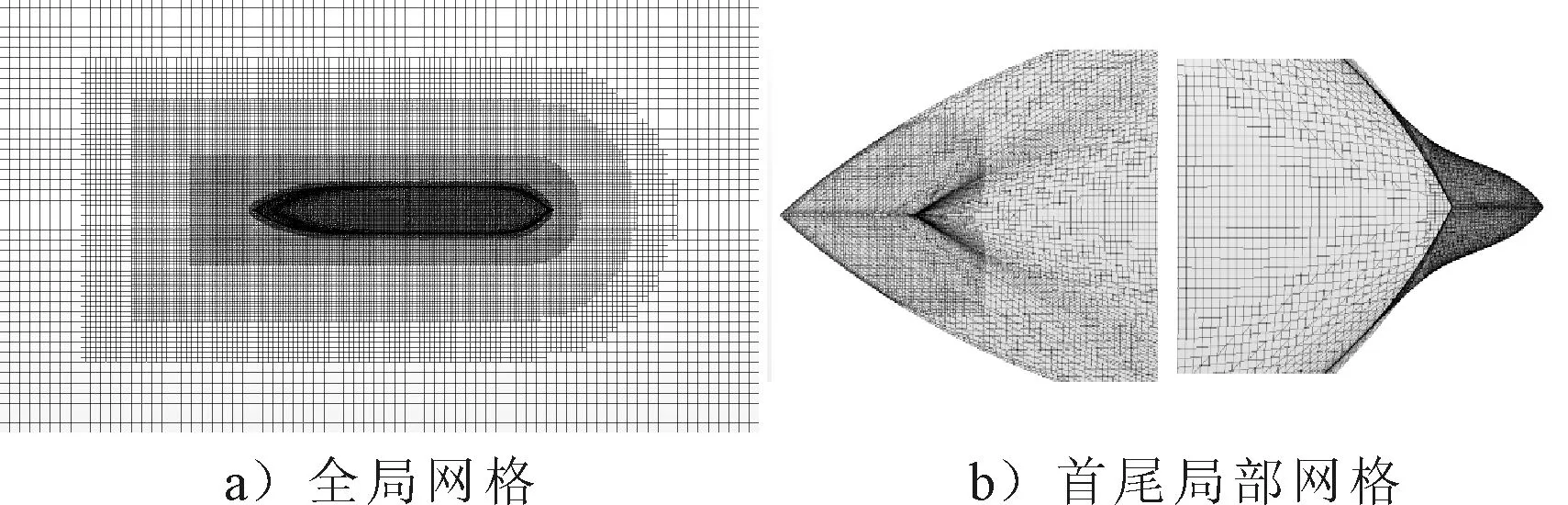
图4 网格细节
3 方法验证

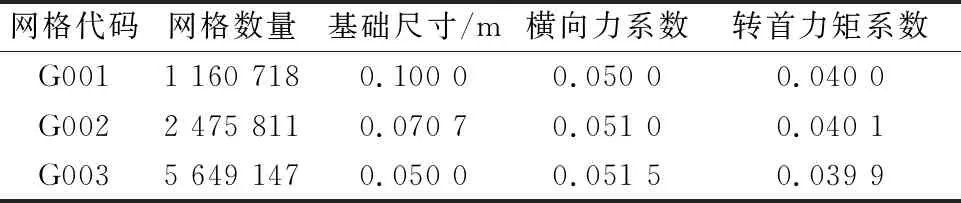
表2 网格信息及水动力计算结果
3.1 验证
相邻两组网格对应的横向力系数之差为εFG,有εFG21=SFG2-SFG1=0.001 0;εFG32=SFG3-SFG2=0.000 5.对应收敛率RFG为
根据文献[16]所述,收敛状况可分三种.
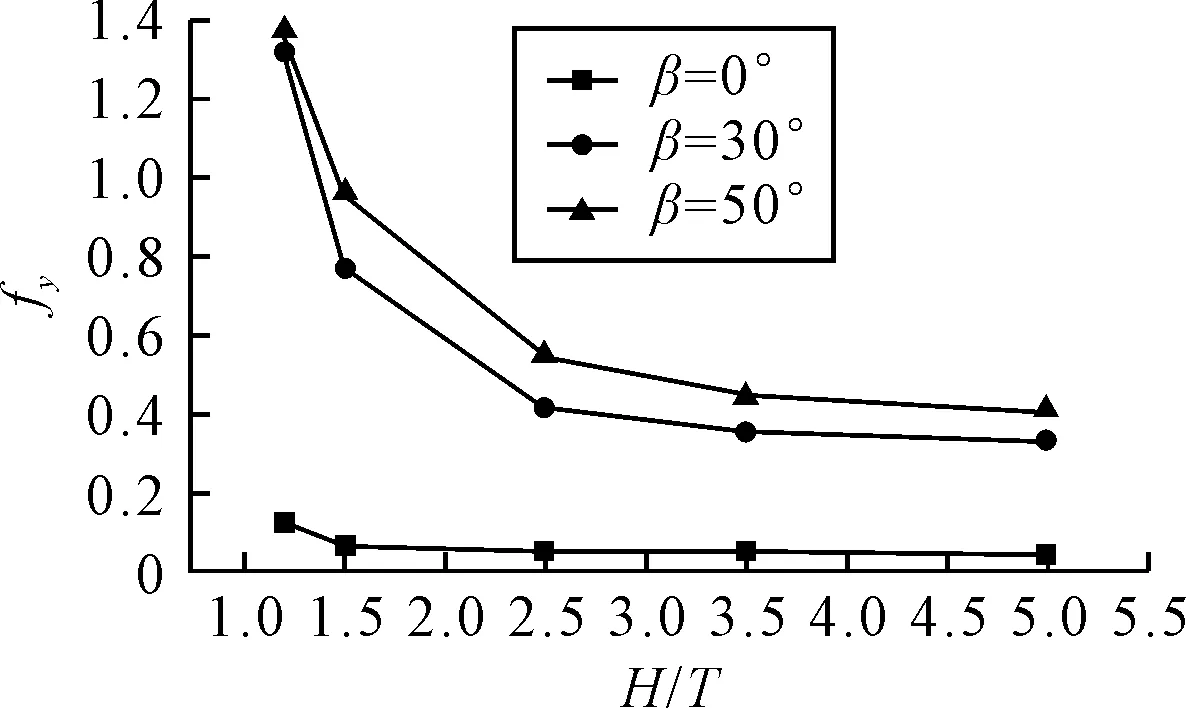
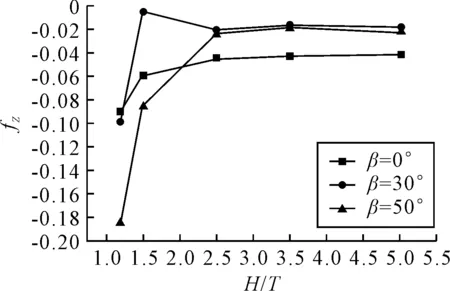
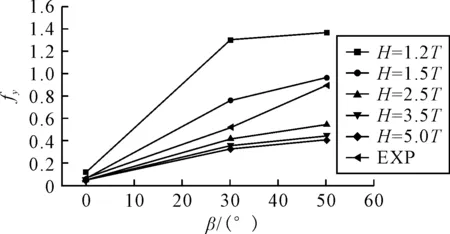
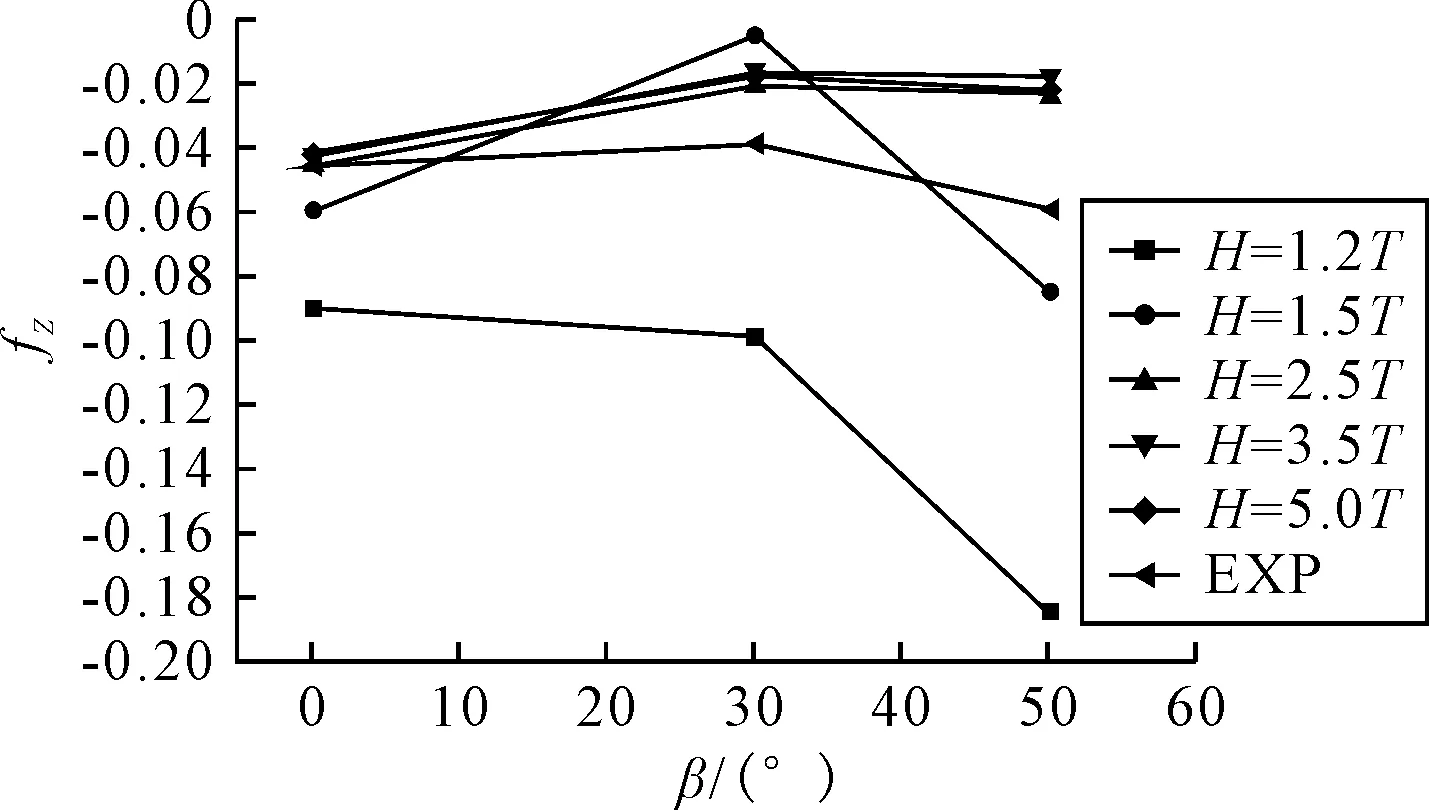
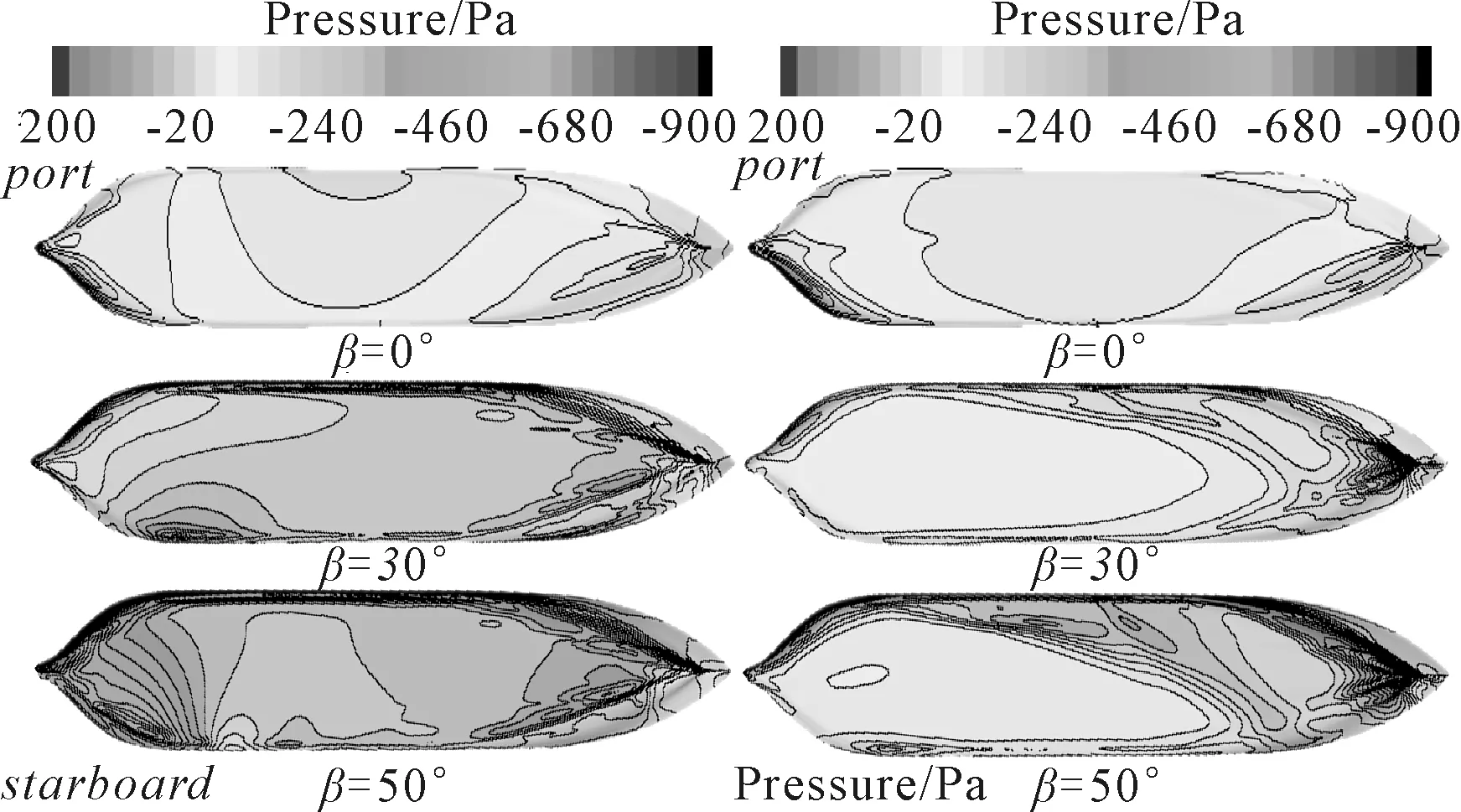
1) 0 2)RG<0,振荡收敛,由振幅获取误差范围; 3)RG>1,发散,无法估算误差. 因RFG=2>1,所以横向力系数误差不确定度无法确定. 相邻两组网格对应的转首力矩系数之差为εMG,有εMG21=SMG2-SMG1=0.000 1;εMG32=SMG3-SMG2=-0.000 2.对应收敛率RMG为 因为RMG=-0.5<0,所以转首力矩系数只能根据振幅来估算: 根据文献[1]可知,横向力系数的试验值DF=0.071 0,转首力矩系数的试验值DM=0.045 9.文中数据读取自文献[1],读取过程本身会产生一定的误差;同时不考虑自由面兴波、岸壁效应及下蹲等物理现象,且试验船模带附体,而本文模拟所用船模不带附体,这些处理和差异都会增大误差.综合考虑这些因素后,取试验值不确定度UD=20%D.根据文献[16]所述,因为RFG=2>1,所以无法确定横向力误差不确定度.但是其计算结果相对误差的绝对值在20%附近,属于工程可接受的误差范围,故此处默认横向力计算结果已完成确认.转首力矩对比误差EM为 EM1=DM-SMG1=0.045 9-0.040 0=12.9%D EM2=DM-SMG2=0.045 9-0.040 1=12.6%D EM3=DM-SMG3=0.045 9-0.039 9=13.1%D 转首力矩确认的不确定度UMV为 因为|EM| 计算中,航速V=0.532 m/s,相应的雷诺数Re=2.12×106,弗劳德数Fr=0.084 9;采用上文验证过的数值方法针对不同水深H(H=1.2,1.5,2.5,3.5,5T,其中T为船舶吃水)下,不同漂角β(β=0°,30°,50°,70°,90°)与较小半径R(R=1.25L)相组合的回转运动进行了计算. 4.2.1水深的影响 图5为不同漂角航态下,船舶所受横向力随水深的变化曲线.由图5可知,无论漂角大小,随水深的增加,横向力呈下降趋势.β=0°时,横向力明显小于其他漂角,其值受水深影响较小.β=30°和β=50°时,横向力相对较大,其值受水深影响较大,变化最为剧烈的水深在1.2~2.5T. 图5 横向力随水深的变化 图6为不同漂角航态下,船舶所受转首力矩随水深的变化曲线.从图中可以看出,无论漂角大小,转首力矩在1.2~1.5T变化较为剧烈,且在3.5T之后基本保持不变,也就是说浅水效应逐渐消失.β=0°和β=50°时,转首力矩随水深的增加不断减小;而β=30°时,转首力矩随水深的增加总趋势也在不断减小,但其减小过程是波动的. 图6 转首力矩随水深的变化 图7为β=0°和β=50°时,不同水深下船体表面压力云图.其中,β=0°为小漂角工况,β=50°为大漂角工况.由图7b)可知,压力在首尾处变化梯度较大,正高压区主要集中在左舷船中处,负高压区集中在船首和右舷船尾处,这种分布随水深增加而越趋明显.与图7a)相比,图7b)的压力云图则要复杂很多,且其复杂程度随水深的增加在减小.水深小于2.5T时,船体压力云图分布复杂,无明显规律可循.水深大于2.5T时,压力云图分布随水深增加趋于相同. 图7 船体表面压力云图 4.2.2漂角的影响 图8为不同水深的回转工况下,船舶所受横向力随漂角的变化曲线.由图8可知,无论是深水还是浅水,横向力随漂角的增大而增大,此外,50°漂角对应的力的值最大,且其值随水深的增加而减小. 图8 横向力随漂角的变化曲线 从30°漂角之后,数值计算结果与试验结果误差在增大,某些漂角的误差可能已经超出工程可以接受的误差上限.误差增大的原因是船体周围流场随漂角的增大变得越来越复杂,计算选用的k-ε模型已不能模拟该状态下的湍流,从而导致计算结果误差增大. 图9为不同水深的回转工况下,船舶所受转首力矩随漂角的变化曲线.由图9可知,当水深大于或等于2.5T时,转首力矩随漂角的增大先增大后减小;当水深小于2.5T时,转首力矩随漂角的变化也是近似先增大再减小,但同样也是30°漂角后,其值波动较大,且水越浅波动越明显.该波动可能是由于越来越明显的浅水效应导致. 图9 转首力矩随漂角变化的曲线 图10为H=1.2和5.0T时,不同漂角航态下船体表面压力云图.其中,H=1.2T为浅水工况,H=5.0T为深水工况. 图10 船体表面压力分布图 由图10a)可知,船底压力随漂角的增大而增加.0°漂角时,船底还是以较小的压力为主;30°漂角时,船底处于正压到负压过渡的阶段.到50°漂角时,船首、尾部出现负高压,船尾负高压相对较小.由图10b)可知,随漂角的增大,左舷尾部逐渐出现负高压区,且负压值呈增大趋势,整个漂角增大的过程中,船底受力由正压为主变成了正负压共存,且正负压界限分明的分布在首尾处. 浅水中,漂角的增大使得船底压力由正压为主变成了负压为主.该现象可以理解为浅水中漂角的增大引起了船舶的下蹲倾向.深水中,漂角的增大使得船底受力由正压为主变成了正负压共存,且正负压界限分明的分布在首尾处.该现象可以理解为深水中漂角的增大引起了船舶的尾倾. 1) 在30°漂角之后,虽然数值误差增大,但结果依然可以正确预报船舶所受横向力和转首力矩的变化趋势.可以发现:漂角越大、水越浅,船舶所受横向力越大;随漂角增大,船舶所受转首力矩值波动较大,且水越浅,这种波动变化越明显. 2) 深水中,漂角越大,数值模拟结果的误差越大.针对船底受力情况,可以发现:水越浅,漂角越大,船底周围流场越复杂;浅水中,漂角增大可使船舶发生下蹲现象;深水中,漂角增大可使船舶发生尾倾现象. 需要指出的是,由于缺乏浅水工况试验数据,本文关于浅水工况所得到的结论只是定性的.今后需要获取浅水工况下的试验数据,对本文方法进行进一步验证,以实现对船舶浅水中低速回转运动性能的更精确的预报.3.2 确认
4 浅水工况计算结果
4.1 工况描述
4.2 计算结果

5 结 论
