ODIC-DBSCAN:一种新的簇内孤立点分析算法
2019-12-12王跃飞苏国平钱育蓉
王跃飞 于 炯 苏国平 钱育蓉 廖 彬 刘 粟
聚类算法在计算机科学、交通运输、电子商务[1−3]等越来越多的学科、领域中均有重要应用.特别在计算机领域,聚类算法是机器学习、数据挖掘及人工智能的基础.相应的,各类丰富的聚类思想及其衍生算法应运而生.总体上,聚类可分为基于划分、密度、网格、层次等方法,不同的方法采用了不同的聚类思想和技术,致使聚类结果具备多样化特征.
聚类技术同样是孤立点检测的重要手段.孤立点概念的提出[4]不仅使各行业的数据纯度得以有效保障,同样为新知识的探索和挖掘提供了重要依据.
在目前的研究进展中,有基于统计学[5−6],基于距离[7−8],基于密度[9−10]与基于聚类等不同的检测思想,在聚类技术的检测手段中,一般是将生成的簇外点置为孤立点.
然而,主流方法一般聚焦于簇间的孤立点检测,而忽略了簇内的孤立点,聚类算法更是将簇范围下的点均默认为正常点,不启用二次审查.实际上,簇内的孤立点是有可能存在的,主要原因是聚类属于无监督学习(Unsupervised learning),在没有指示标签的情况下,不同的聚类方法可能产生多种结果,包括簇的数目不同;另一方面,在大部分行业中孤立点是动态生成的,如在医学领域中,病变早期细胞组织的位置由正常区域逐渐位移,使聚类的几何中心产生偏移,因此及早地发现簇内异常对这类现象具有重大意义.
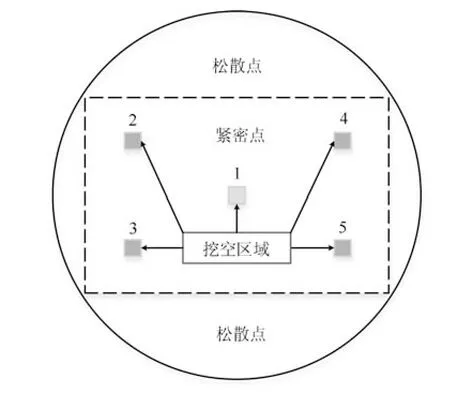
图1 的3 种现象描述了簇内孤立点的产生原因.
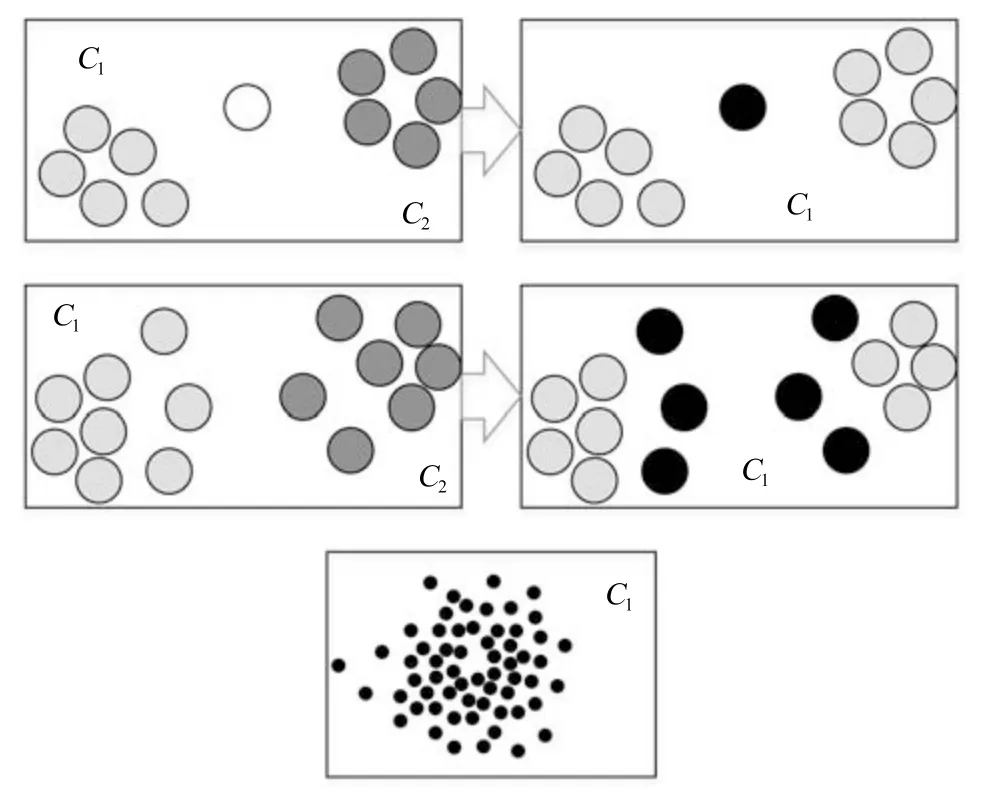
图1 簇内孤立点产出原因Fig.1 The cause of inliers
现象1:当使用不同方法或参数,使原先多个簇发生融合时,先前在多簇间被判定为孤立点的对象会被判定为正常点,产生误判.
现象2:当多个簇发生融合时,若汇聚的一面为簇的边缘,则汇聚后簇存在松散域,其中的点可能具有孤立性质.
现象3:当点集紧密投影在区域内部时,若有一处存在明显稀疏或空白,则该区域下的点需要重点考证研究.
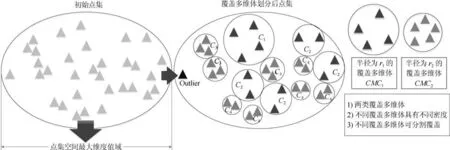
以上三类典型现象不仅描述了具有孤立性质的点被判定为正常点的情况,同时可以将簇内孤立点按产生原因分为两类:1)聚类技术中,不同的参数使簇发生融合时产生;2)数据的原始分布造成.以上误判的出现影响了聚类效果,污染了数据纯度,降低了数据质量.在聚类计算中,忽略簇内孤立点容易造成簇中心位置的误判;在各类生产生活以及应用中,由于参数或方法的不当使用,孤立点的忽略更可能会带来安全隐患.为避免上述现象的出现,需要对簇内孤立点进行更加深入的研究,设计更为有效的簇内孤立点判定算法.该算法需具有以下3 方面的功能:
1)能够分析簇间孤立点;
2)能够分析簇内孤立点;
3)不影响聚类效果且时间复杂度较低.
本文提出一种对簇内孤立点敏感的方法:ODIC-DBSCAN,该方法考虑到不同半径下密度间的关系,通过有效相邻半径构成的多维体能够覆盖点集的思想,计算在不同密度下的相关参数,重构了DBSCAN 框架,查找出簇内孤立点.本文的主要工作有以下几方面:
1)获取有效半径.为检测簇内部的孤立点,首先对数据集的密度进行层次划分,并提出半径获取策略.该方法能够根据点与点间的距离关系对任意数据集提取有效半径.
2)提出点集覆盖的思想.该思想以有效半径为基础,分割覆盖为原则,表示为相邻有效半径能将数据集完整覆盖.在此基础上,通过相邻有效半径构造出多条无差别曲线,每一条曲线的点均能描述数据集被覆盖的情况,并使用拉格朗日乘子法求取了最优值.
3)从两方面重构了DBSCAN 算法.第一,修改了DBSCAN 中核心对象的定义,以相邻半径间点数的比值代替了半径下点的数目.第二,提出了算法的终止条件,以簇间是否发生融合现象作为聚类效果的依据.
本文第1 节简要概述相关工作.第2 节首先介绍了DBSCAN 的缺陷,提出了解决方法;并在后续的小节中详细介绍了ODIC-DBSCAN 的模型研究,依序包括半径获取策略(第2.2 节)与点集覆盖模型(第2.3 节),并在第2.4 节中展开聚类算法的重构工作;最后分析了算法时间复杂度.实验部分在第3 节中展开,该部分展示了ODIC-DBSCAN 算法的运行细节;分析了算法的两项性能指标;验证了算法对簇内孤立点辨别的优势,并与其他同类算法的运行效果进行了对比.
1 相关工作
当前大部分聚类算法对簇内或簇间的孤立点检测均有一定的效果,但传统算法由于关注聚类的思想、结果、效率、以及孤立程度等问题,并未专注于簇内孤立点的发现,因此对簇内孤立点并不敏感.总体上,孤立点的研究是一个宽广的领域,针对各个类型的数据,孤立点检测有不同的方法[11],如高维数据[12]、不确定数据[13]、流式数据[14]、网络数据[15].目前在基础研究中,孤立点的分析与进展有以下方面:文献[9]在密度聚类的基础上,提出了一种将点数据分为多个层次的思想,使同一层的数据在全局具有相似的特性,ISDBSCAN (Influence space DBSCAN)思想与距离有关,算法在目标对象的一定范围内根据邻居点距离的总和使目标对象分层.Duan 等[16]针对密度聚类,对个别小规模的簇被判定为孤立点的现象提出优化方法,所提出的LDBSCAN (Local-density based spatial clustering algorithm with noise)方法能达到分离簇与点的目的;文献[16]认为,孤立点的现象不应仅仅是单独点离群的状态,在较小的簇偏离点集主体区域时,该簇内的点均应被认作孤立点;在基于簇的孤立点(Cluster-based outlier)检测中,文章提出了LDBSCAN 算法,并提出了离群簇孤立程度的计算方式.文献[17]针对传统孤立点检测在大规模数据集中效果差强人意的现象,提出了一种基于统计的孤立点检测方法.首先通过三倍标准差法记录密度峰值,其次将剩余数据以近邻原则指定到相应的簇中,最后使用切比雪夫不等式与密度可达性来判定目标点是否为孤立点.文献[18]使用分治思想(Divide-and-conquer strategy)提出一种孤立点识别策略:初始时数据集被分为两个簇,然后算法在全局过程中通过迭代来检查两个密度波峰是否密度可达,以验证二者是否为同一个簇,循环后最终将点指定到所属簇中.上述工作计算了边缘密度,因此当点的边缘密度低于阈值时被认作孤立点.文献[19]提出了不再将孤立点定义为二值属性,而是根据被孤立的程度给予不同的局部异常因子,对于模糊点,给定了LOF (Local outlier factor)的值边界.在基于非二值属性的宏观思想下,面向角度[20],面向距离[7]等检测方法应运而生.以上方法能对任意数据对象赋予孤立程度(Outlier-ness),只是检测的思想不同.文献[20]考虑角度因素,并论证了角度特征对高维空间下的数据衡量更加精准;F-ABOD 方法比对任意三点构成的两个向量间夹角大小,通过角度确定点距簇心的远近.文献[7]着重距离因素,对数据点建立双层邻居系统(Neighborhood system),并通过双层邻居的距离关系反馈核心点的孤立性.
聚类是一种检测孤立点的有效手段,基于密度的检测思想是检验点间关系的有效方法.在这些方法中,Rodriguez 等提出一种基于密度峰值聚类的方法DPC (Density peaks clustering,DPC)[21],该方法认为,簇中心的密度一定比边缘处高,且与距它密度更高的簇心距离较大;在此思想上,算法不断寻找被低密区域分离的高密区域.该方法的优势是不需迭代,因此运行时间短.在此基础上,相关的研究工作陆续展开,包括参数优化[22],聚类的集成[23],自适应模糊聚类[24],以及社交网络下的聚类应用[25]等.另一种基于密度的方法是通过数据点间执行“信息传递”而进行聚类[26].AP (Affinity propagation)算法不需指定簇的数目,而是通过建立吸引信息(Responsibility)与归属信息(Availability)两类矩阵,并引入衰减系数对两类信息进行衰减迭代,当矩阵值稳定时,聚类结束.在AP 技术的研究基础上,一些相关的工作也被相继提出,如图像中半监督的AP 聚类方法[27],基于层次划分的AP 聚类[28]等.OPTICS (Ordering points to identify the clustering structure)是将空间数据依据密度执行聚类的一种方法[29],在DBSCAN 的基础上,OPTICS 的聚类对象能应用于多密度点集,但算法生成的可达距离RD (Reachability distance)不能显示的生成聚类结果,仅生成包含聚类信息的有序对象列表.另外,针对一种密度阈值无法满足全局数据分布的需要,文献[30]提出一种基于密度比(Density-ratio)的思想,并将其应用于DBSCAN、OPTICS 等方法.该思想包含Reconditioning approach 与Rescaling approach 两类方法,前者提出使用密度比而非密度阈值的解决办法,可以植入相关的密度聚类;后者对数据集的坐标进行重投射,使生成的范围点集密度接近预设的密度比参数,这样,使原数据集的密度标准化之后再进行聚类.另外,在算法的应用研究中,孤立点的识别在不同领域中已经有了较大程度的进展.在关于图像的孤立点判定识别中,文献[31]通过计算簇内图像数据偏离的评分确定孤立程度,这个评分根据将簇内点抽离后图像信息的变化量来确定.文献[32]通过使用随机森林与DBSCAN 聚类方法对类似姓名等文本做出识别处理.在无线传感器网络的孤立点检测中,借用DBSCAN 方法,在计算参数,空间时态数据库下识别出具体的类信息,且能够识别出离群点[33].
2 模型与策略
2.1 问题分析
基于密度的聚类(Density-based clustering)能根据样本间的密度关系确定簇的形成,通过邻域大小与该区域内点数目的关系考察点之间的连通性,刻画簇的构成.DBSCAN 算法能将接收到的核心对象(Core object)按不同密度,以不同形状执行聚类,但忽略了点集不同密度间的联系.1)DBSCAN算法仅能接受一种密度条件,并且在没有先验知识的条件下,半径无法明确指定.2)局部数据并非遵循高斯分布,在图1 中的分布现象中,由于输入参数的限制,DBSCAN 不能很好地处理离散点的分析工作.3)密度聚类错过了微观角度下点与点之间的关系.在一个簇中,虽然宏观角度下呈现高密特征,但微观下个别特殊的点与点间可能包含差异较大的距离,遗憾的是,DBSCAN 不能识别类似的特殊点.在簇扩充的工作中,DBSCAN 通过epsilon邻域中点的个数确定该点是否为核心对象;该方法能够计算目标点的密度状态,但忽略了不同密度条件下的不同结果.
簇内孤立点的特性在于目标点与周围的邻居具有密度差异,该差异可能由点的分布直接造成,也可能由聚类算法的参数使用不当生成.在点集中,由于其与周围邻居密度差异较小而经常被忽视,因而簇内孤立点的检验需要算法对微小的密度差异具备敏感性.
定义1.簇内孤立点(Inlier).表示在数据集下的任意簇中,当前目标点的空间密度较邻居点更稀疏的一类对象.由数据的原始分布,或不当参数造成簇融合时算法对簇间点的误判两类原因产生.
当簇发生融合时,簇内与簇间孤立点容易被算法错误判定.如图1 所展示的孤立点与正常点相互转换的情况.为解决以上问题,算法改进的核心是点在不同半径下的密度关系,因此本文关注于点在不同范围下的密度关联,并重定义DBSCAN 的核心对象.具体技术是根据点集的分布情况提取若干由小到大的有效半径,在密度聚类中根据该点在两个半径下密度之比是否大于数据预处理输出的阈值来判定该点是否属于核心对象.
如图2 所示,左部为DBSCAN 算法的核心对象确定方法.当在epsilon半径下,覆盖面下的点数目超过MinPts时,该点(图中为圆心黑色点)为核心对象.右部为ODIC-DBSCAN 的确定方法:通过前期数据预处理输出的典型半径ri、rj,确定两个半径下覆盖面积的密度比值,通过比值是否大于前期数据预处理输出的阈值来确定该点是否为核心对象.
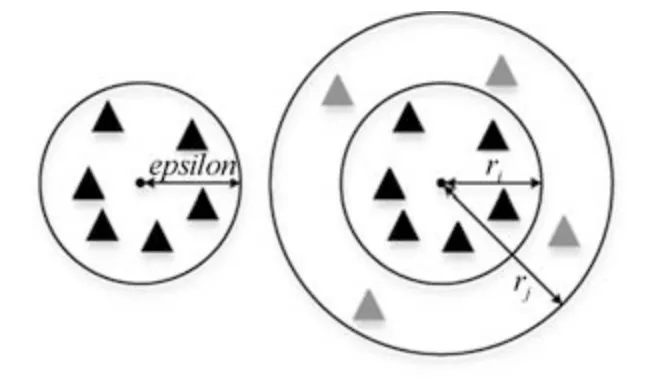
图2 DBSCAN 与ODIC-DBSCAN 的核心对象确定方法Fig.2 The core object confirmation method of DBSCAN and ODIC-DBSCAN
通过上述方法,能够确定目标点在有效的、逐渐扩大的两个范围内相邻数据量的变化情况.在孤立点分析中,ODIC-DBSCAN 算法循环地输入有效半径集合Radius内由小到大相邻半径构成的开圆密度比,并将此作为聚类核心对象判定的阈值.当真实情况超过该阈值,表示该点的范围密度较高,为簇内点;反之该点周围密度较低,为偏边缘点.当选择Radius的半径由小至大时(如图3 所示),簇内孤立点的判定逐渐变得粗略,容易产生融合现象,这表示阈值过于宽泛;为避免融合,应选择簇发生融合之前的结果作为聚类结果.
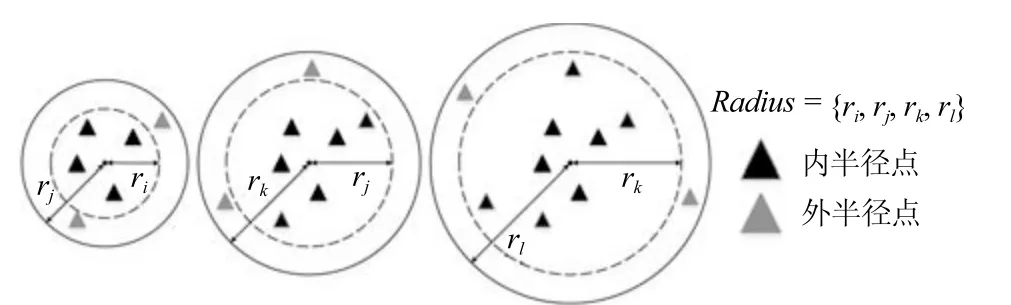
图3 ODIC-DBSCAN 核心对象在半径集合Radius 下的遴选Fig.3 The selection of ODIC-DBSCAN core objects from Radius set
上述思想能够有效判断以目标点为中心,在多重半径范围内的数据点密度的变化情况,并以此作为依据推断该点的位置,确定该点是否具有孤立性质.
ODIC-DBSCAN 算法包含两个参数,分别位于算法流程下数据预处理、簇内孤立点分析这两个部分.如图4 所示,在数据预处理部分,首先根据数据集的距离分布状况,提出一种半径获取策略,该策略能够将数据集的关键距离遴选出作为半径集合Radius,并构建密度矩阵.当获取到Radius后,提出一种思想,证明任意点集能够由集合Radius构成的覆盖多维体完全覆盖;基于此思想,使Radius内相邻半径ri,rj构成的覆盖多维体覆盖点集,并计算对应半径构成覆盖多维体的数目,最终构造出点比阈值组.在ODIC-DBSCAN 算法处理部分,重新定义了DBSCAN 中的核心对象,并提供了一种孤立点分析检测的方法.在以上两部分顺序进行后,算法最终输出簇内的孤立点并生成图像.
2.2 半径获取策略
定义2.距离矩阵.描述了点集P中任意两点之间的欧氏距离.
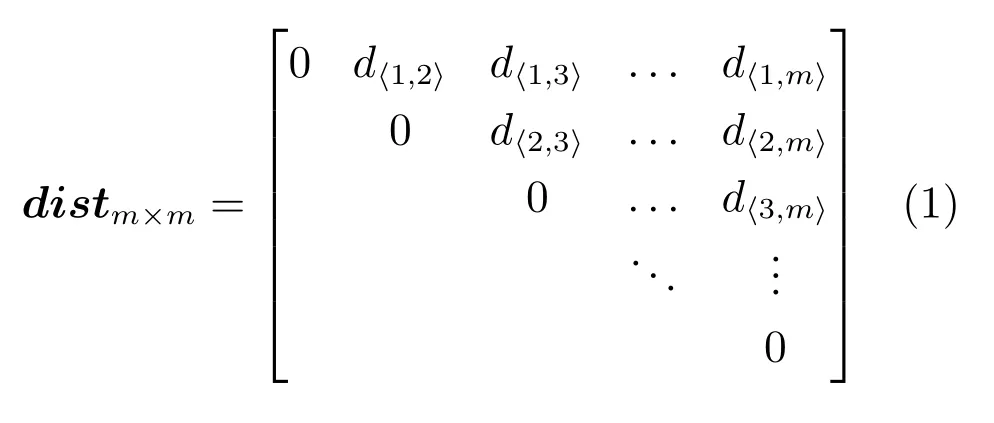
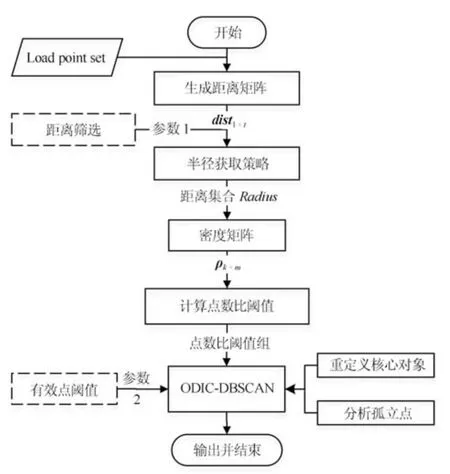
图4 ODIC-DBSCAN 处理流程Fig.4 The processing flow of ODIC-DBSCAN
distm×m是距离矩阵的表现形式,在实际操作中,需要将其转化为一行多列的矩阵格式.因此距离矩阵也被记为dist1×t,其中t为式(1)中对角线以上距离元素的个数.
定义3.密度矩阵.密度矩阵宏观统计点集P中每个点在一定范围内的点数量与面积之比.
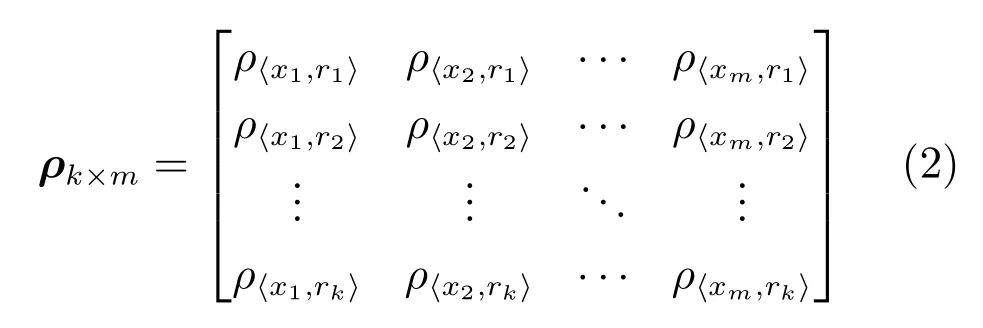
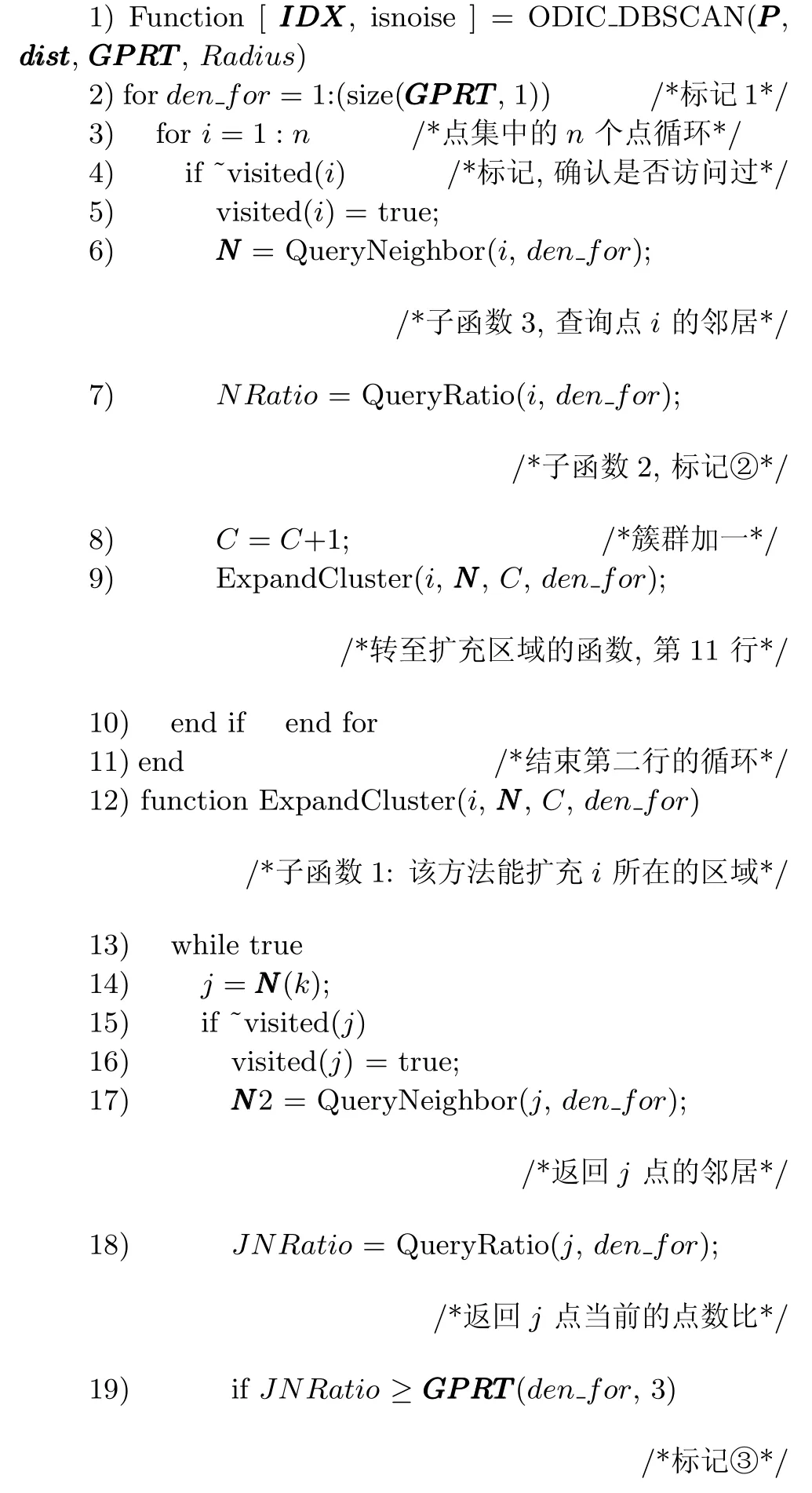
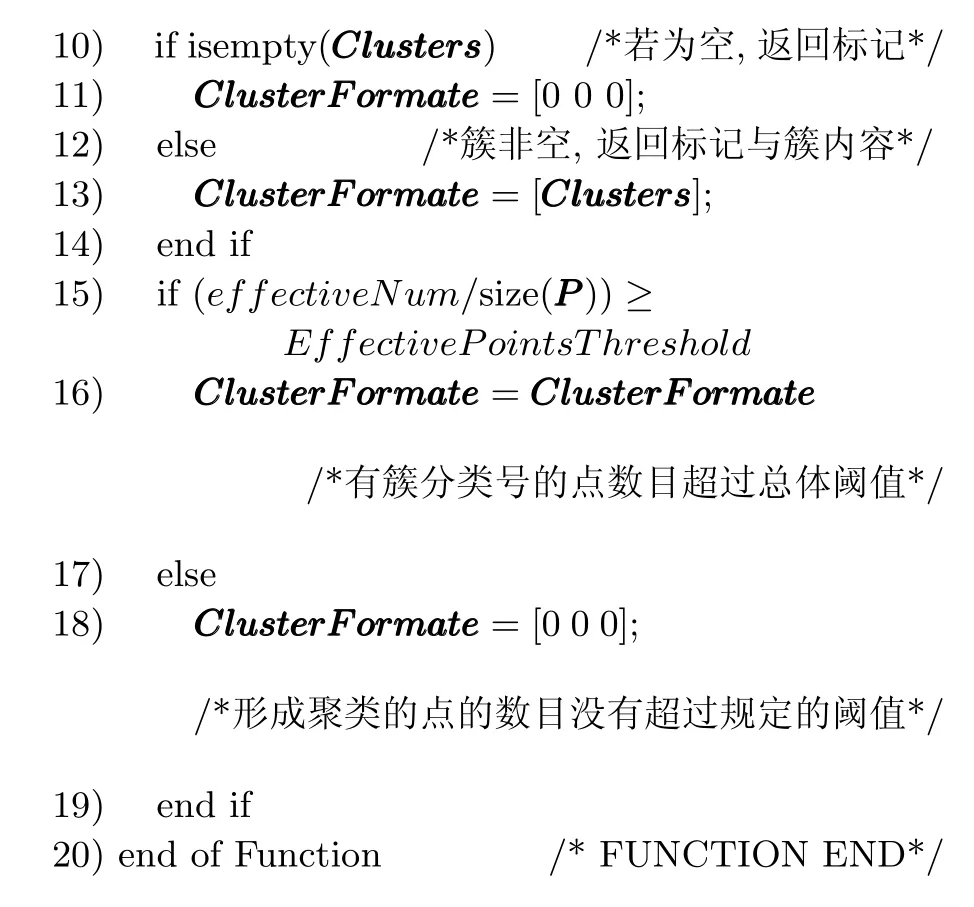
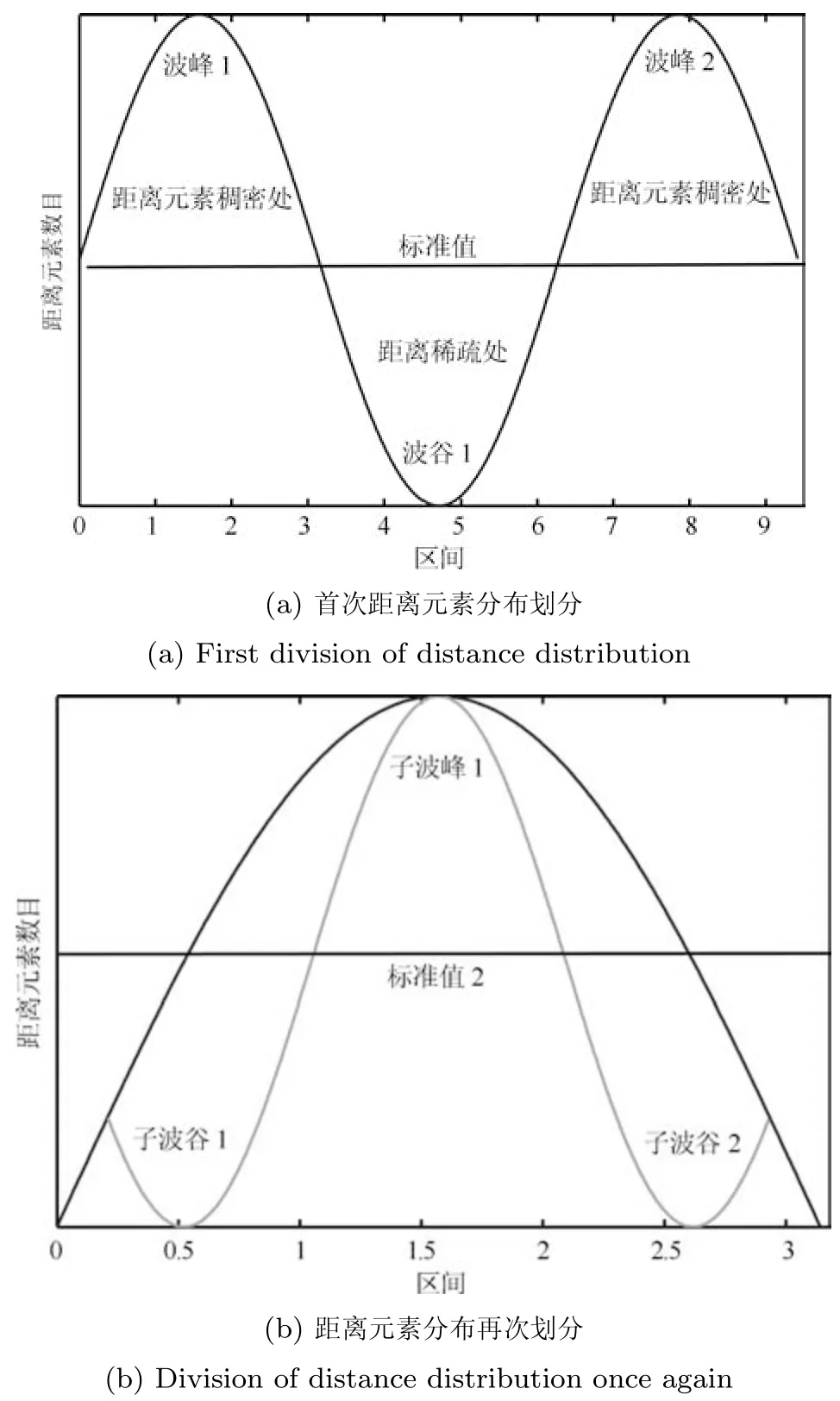
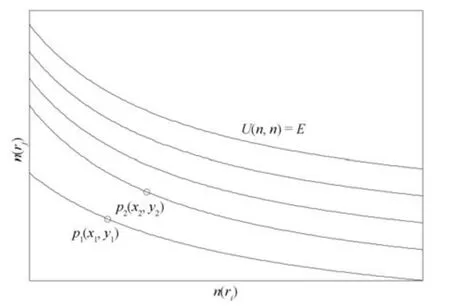
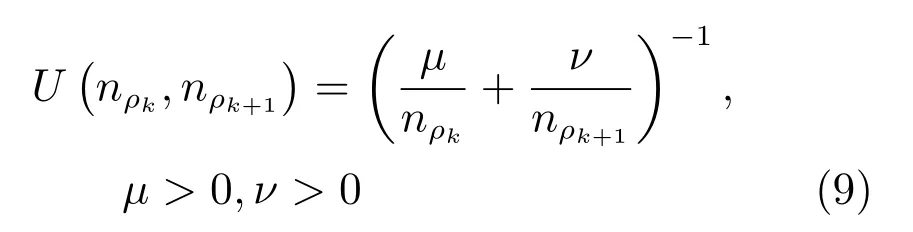
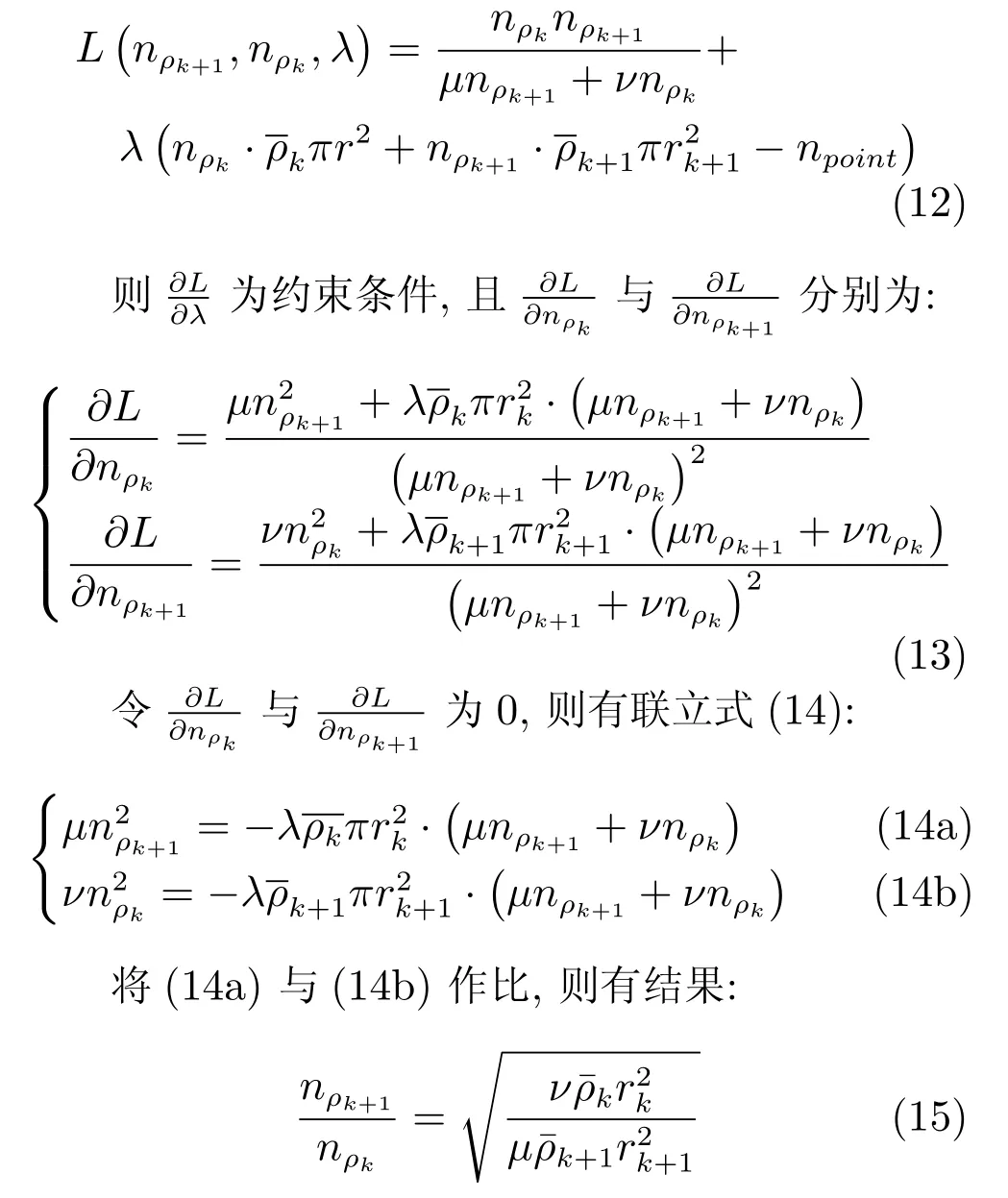
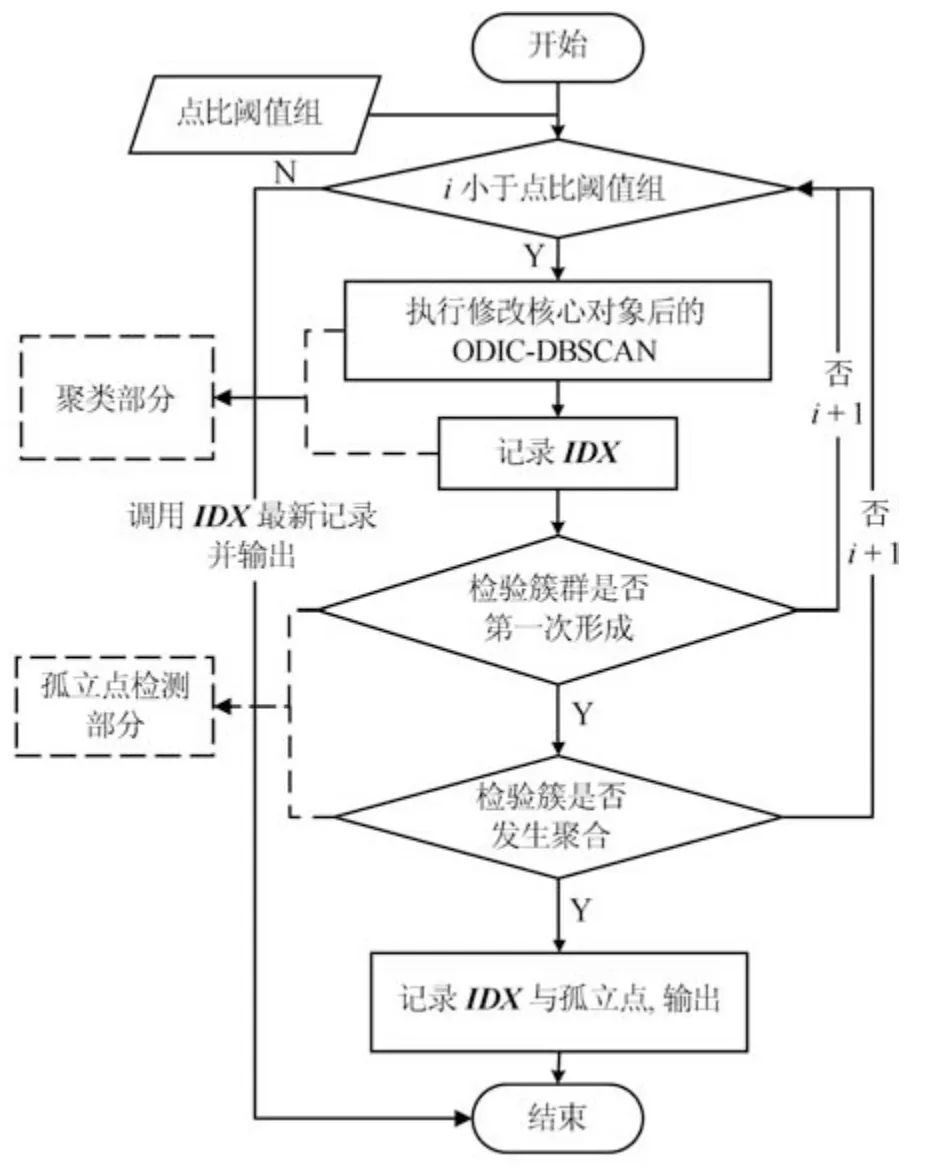
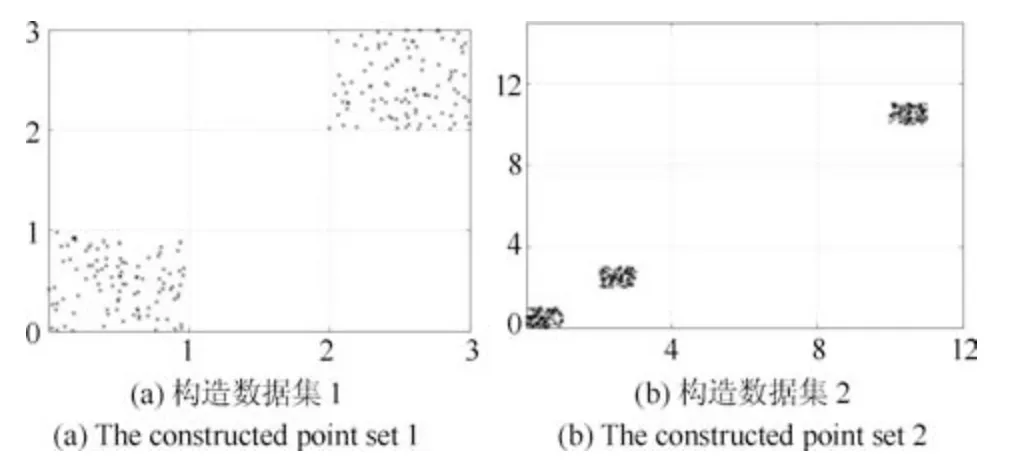
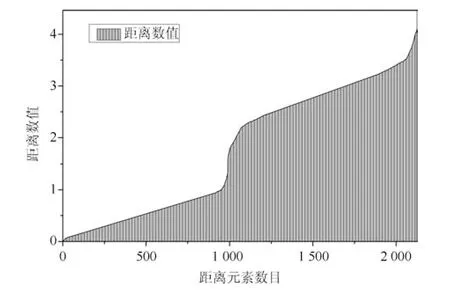
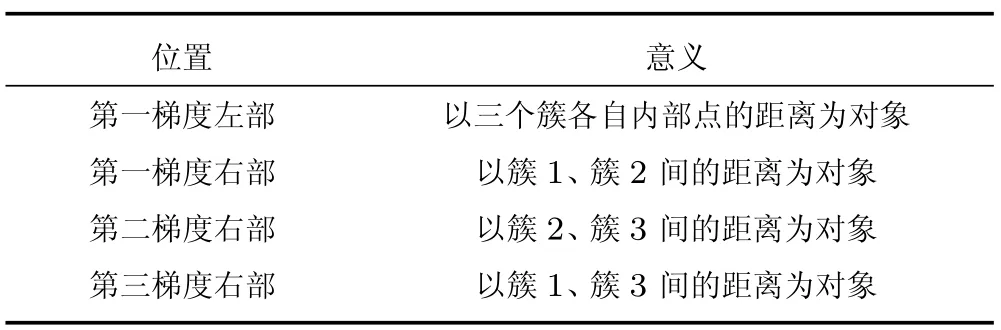
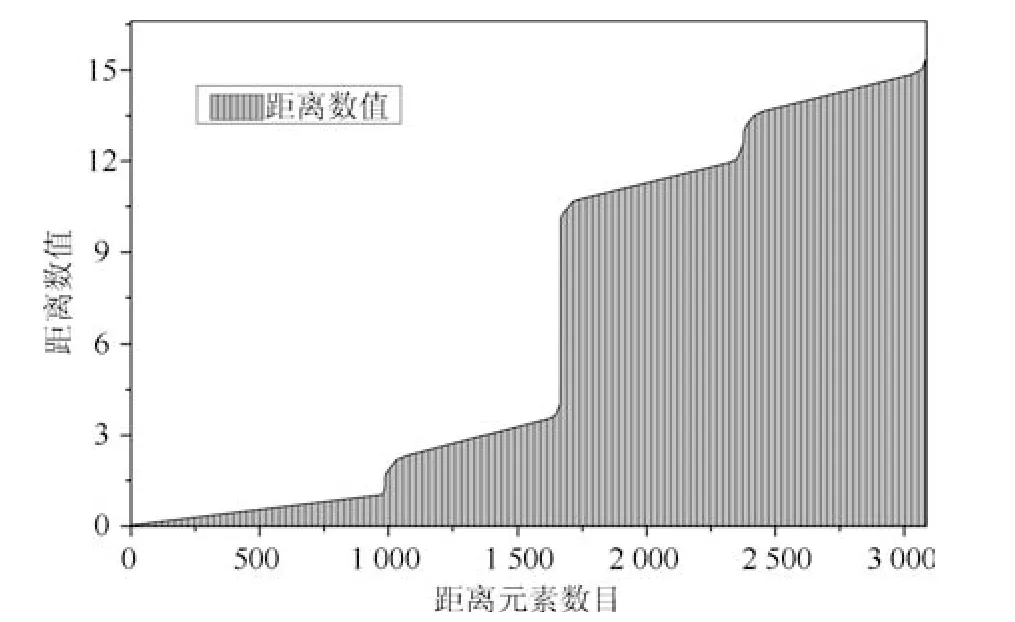
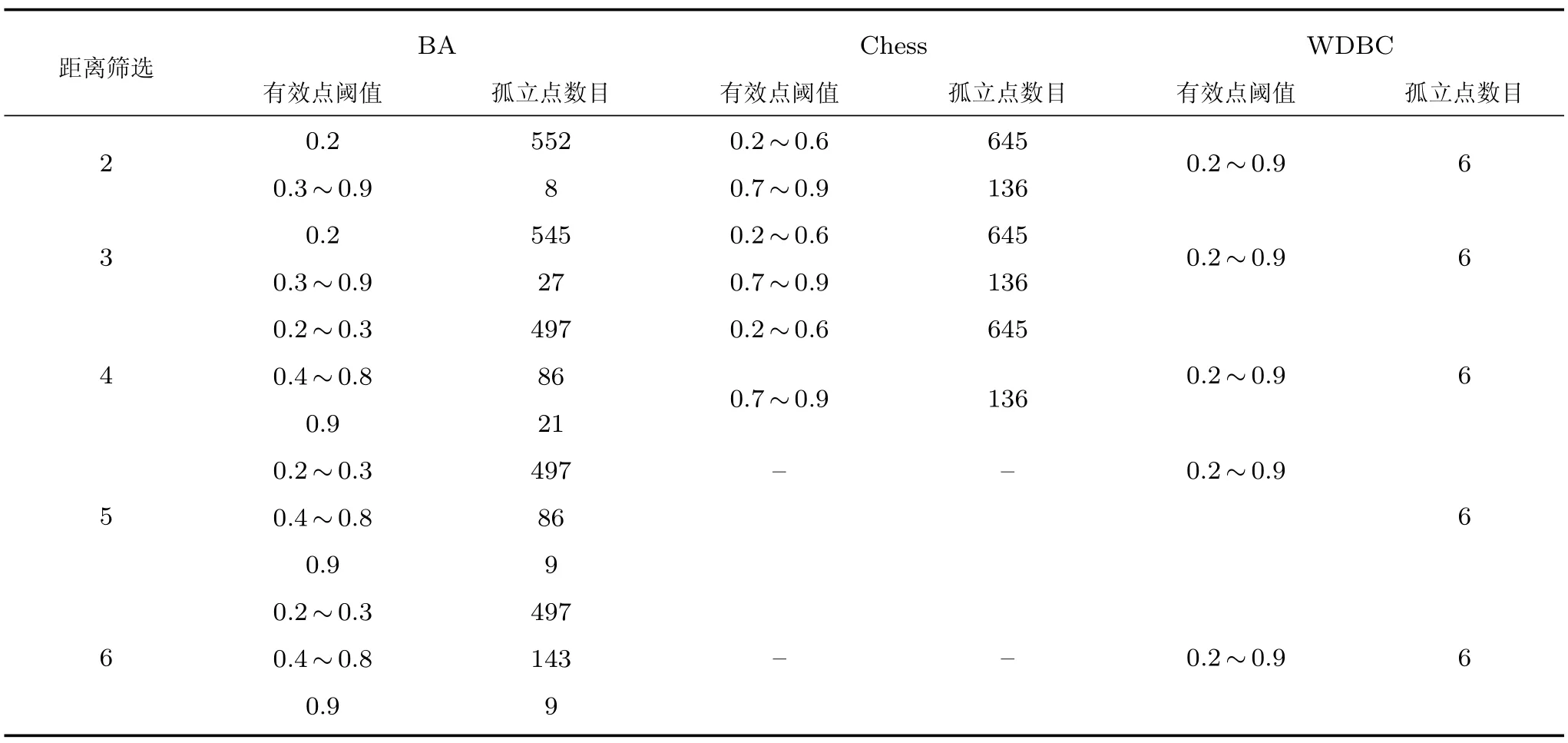
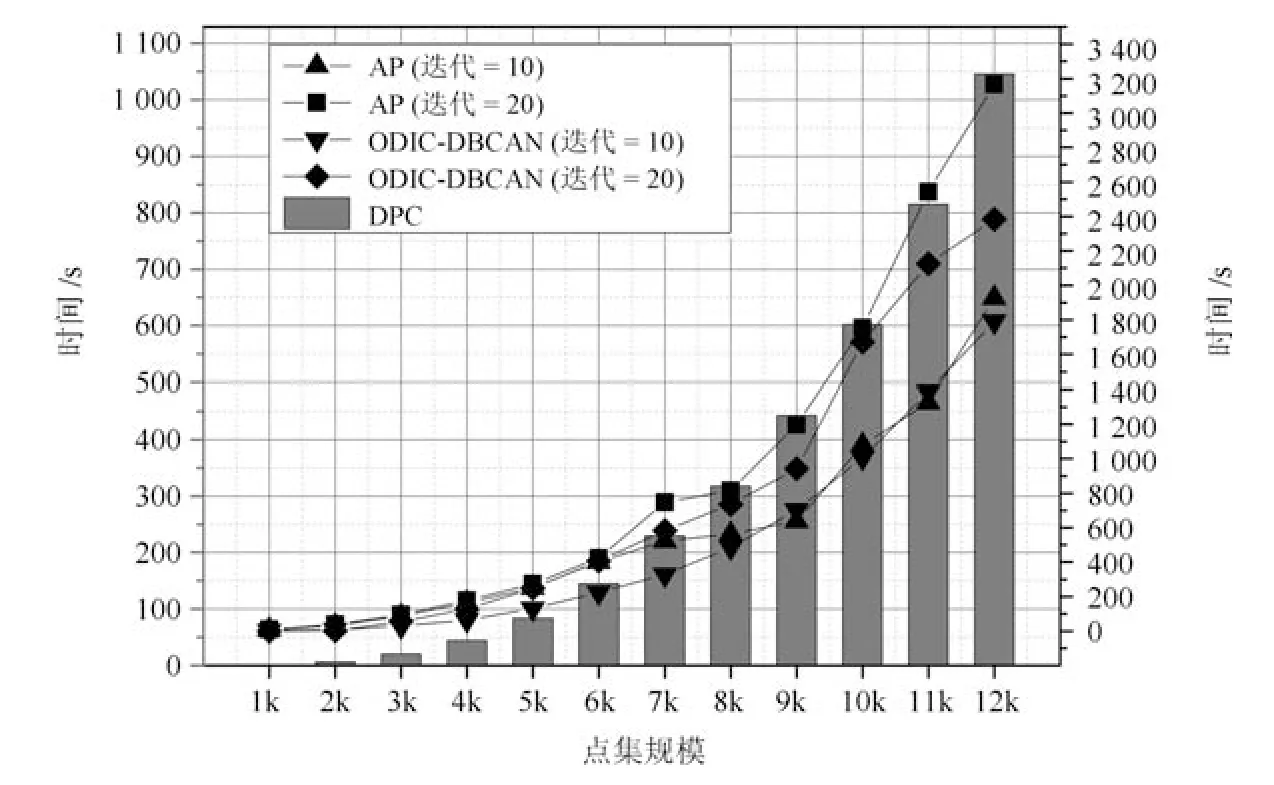
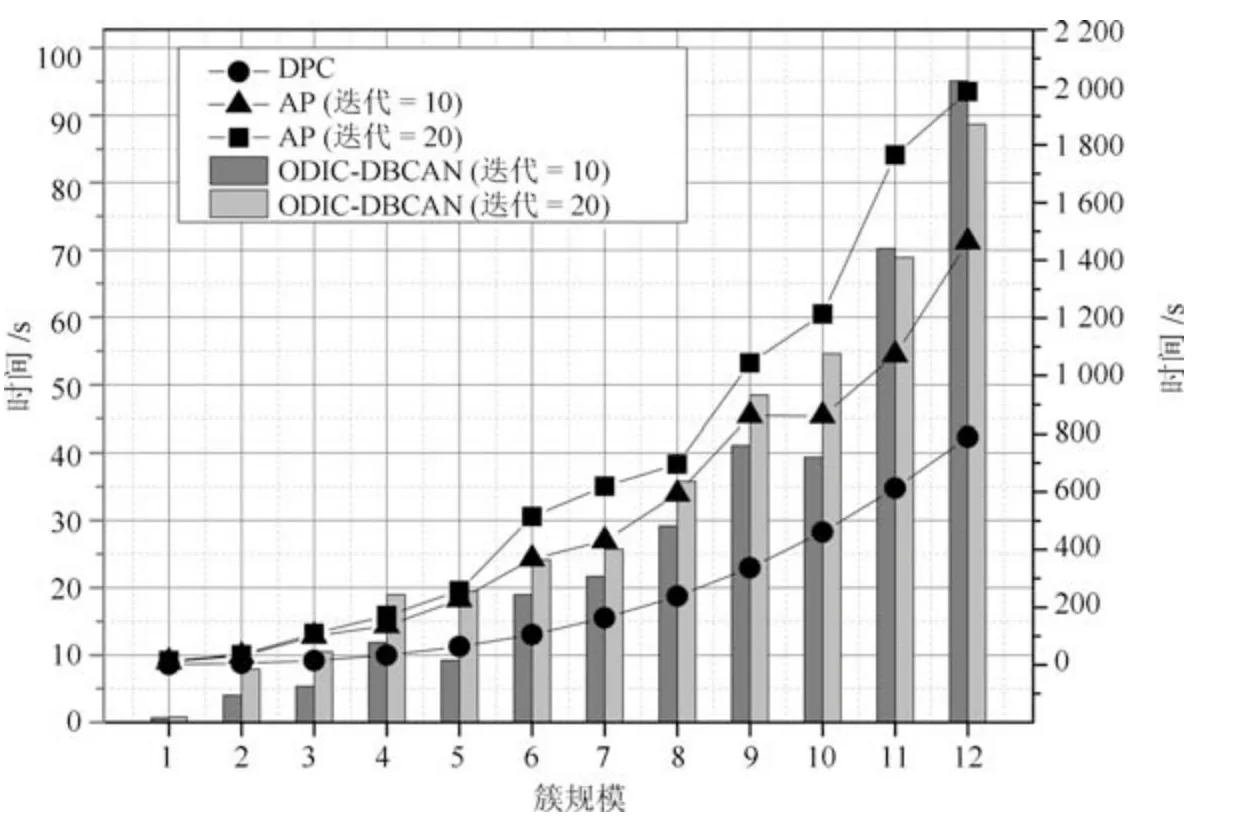
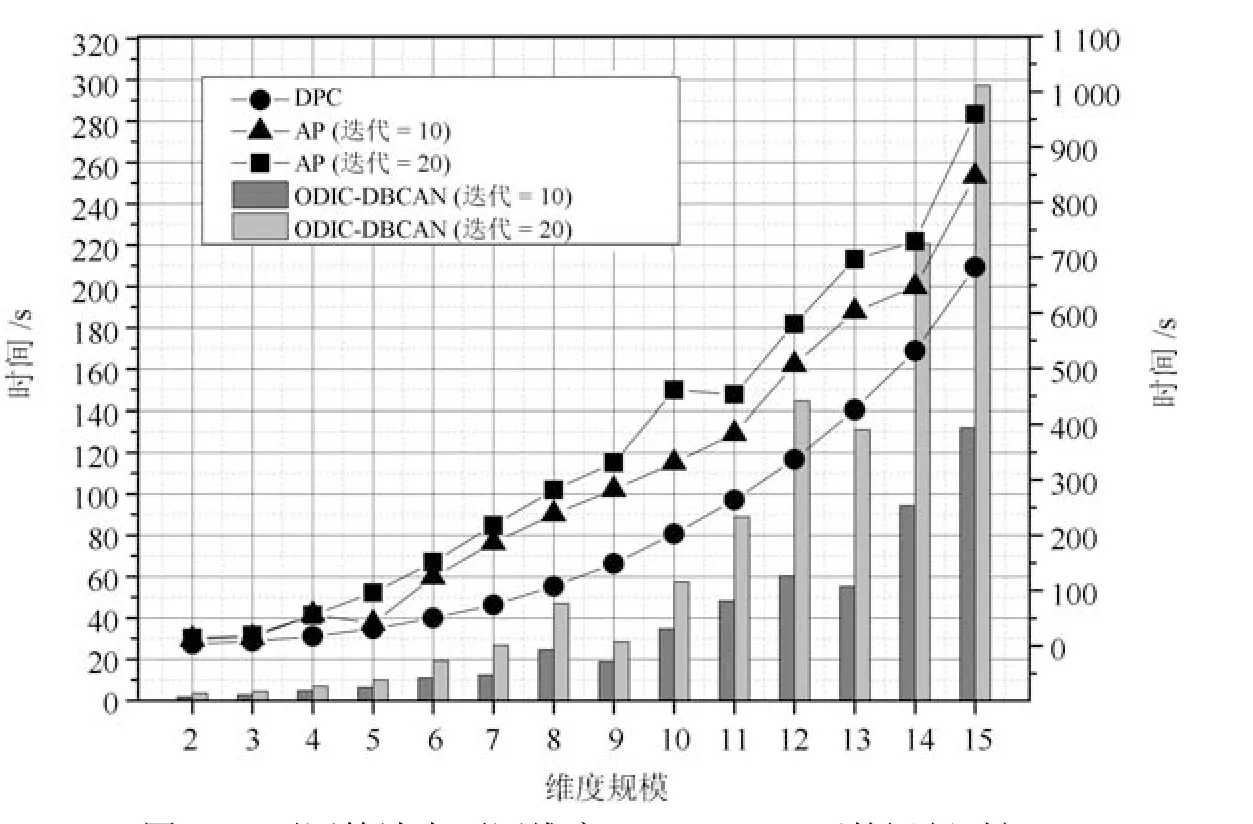
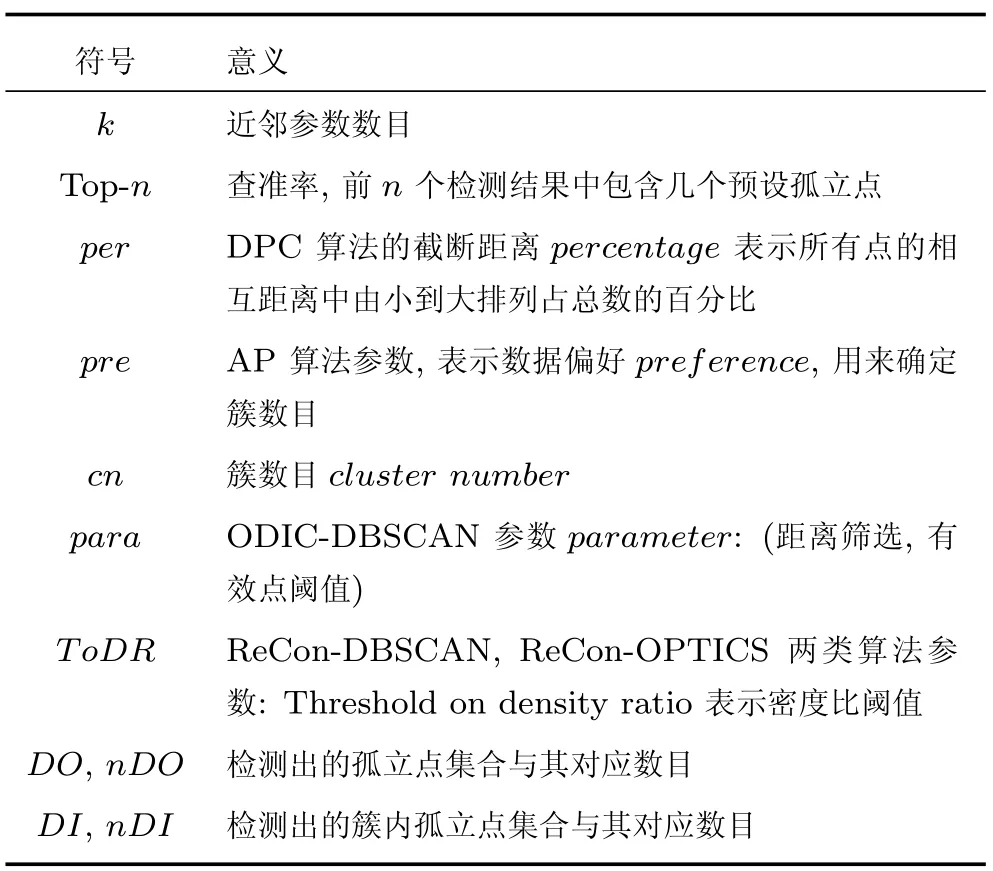
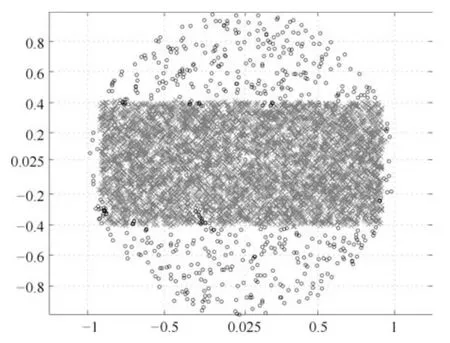
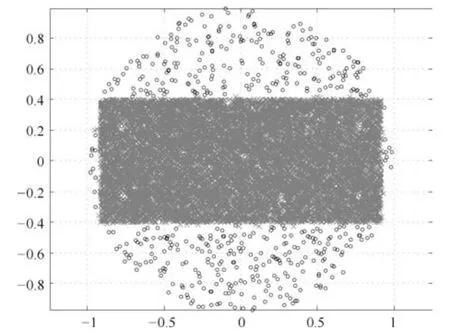
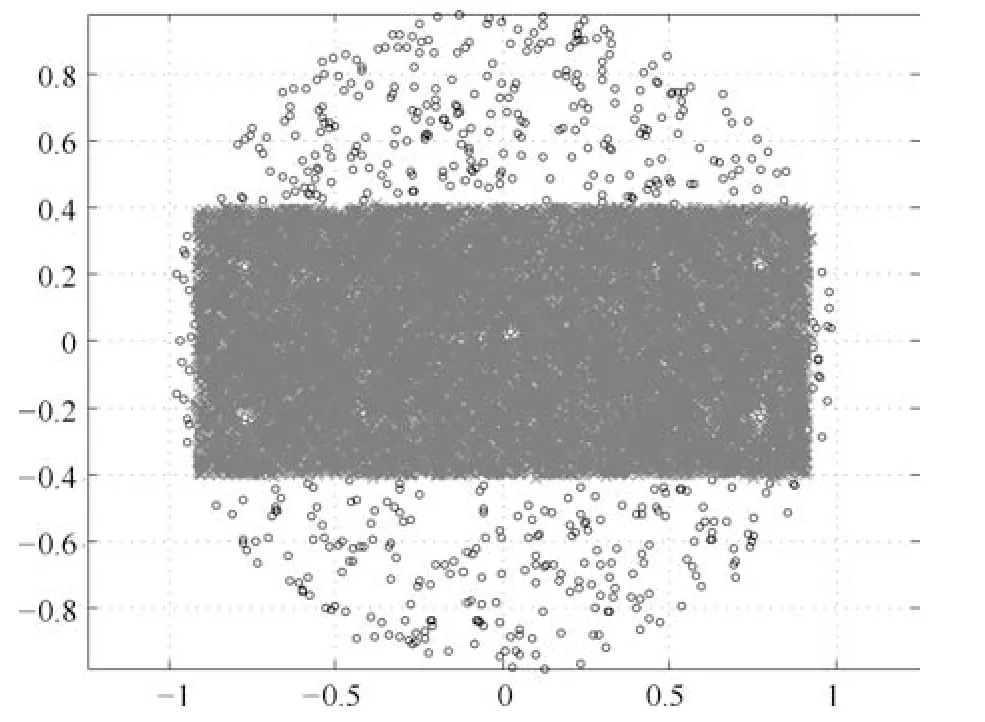
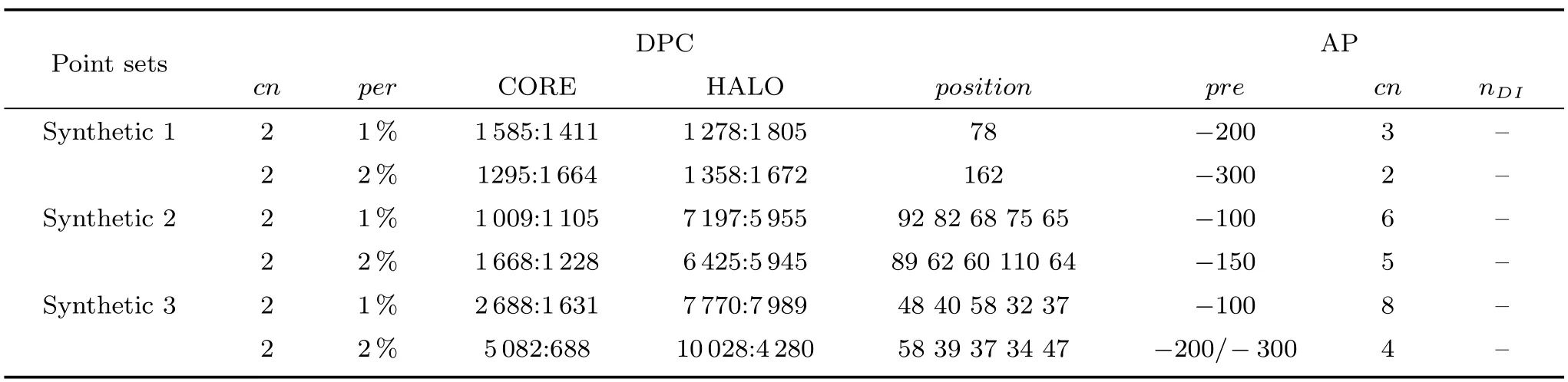
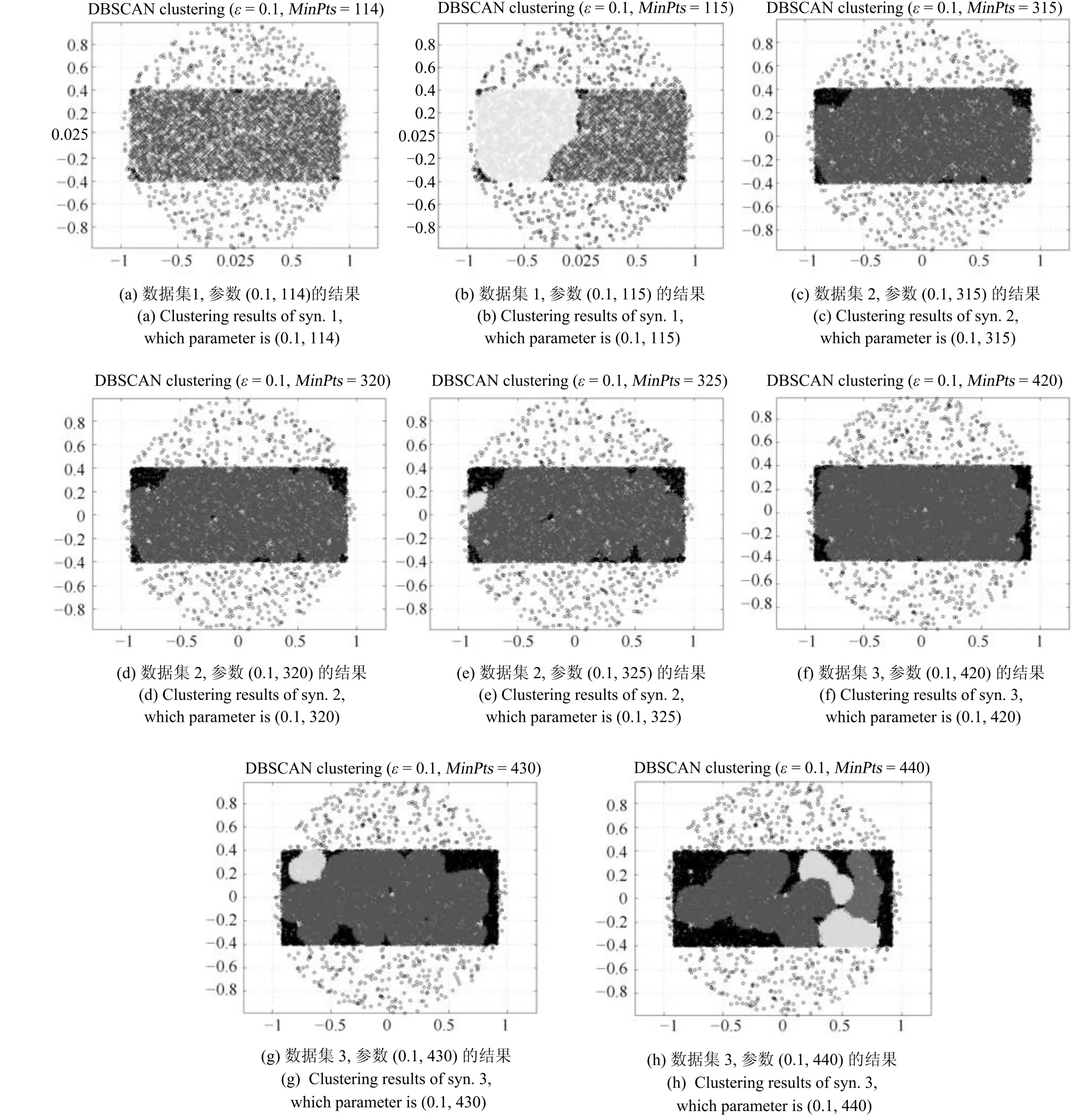
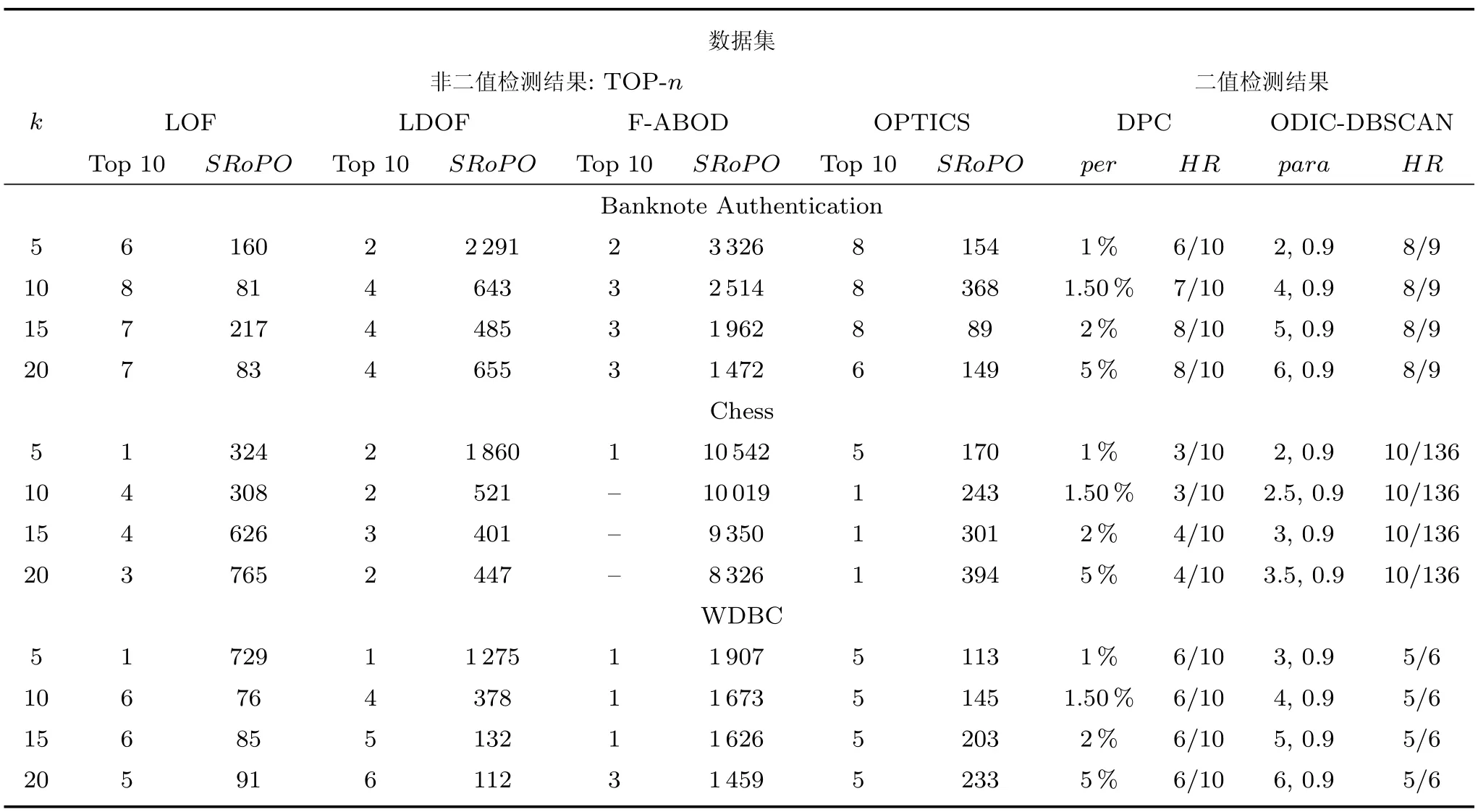
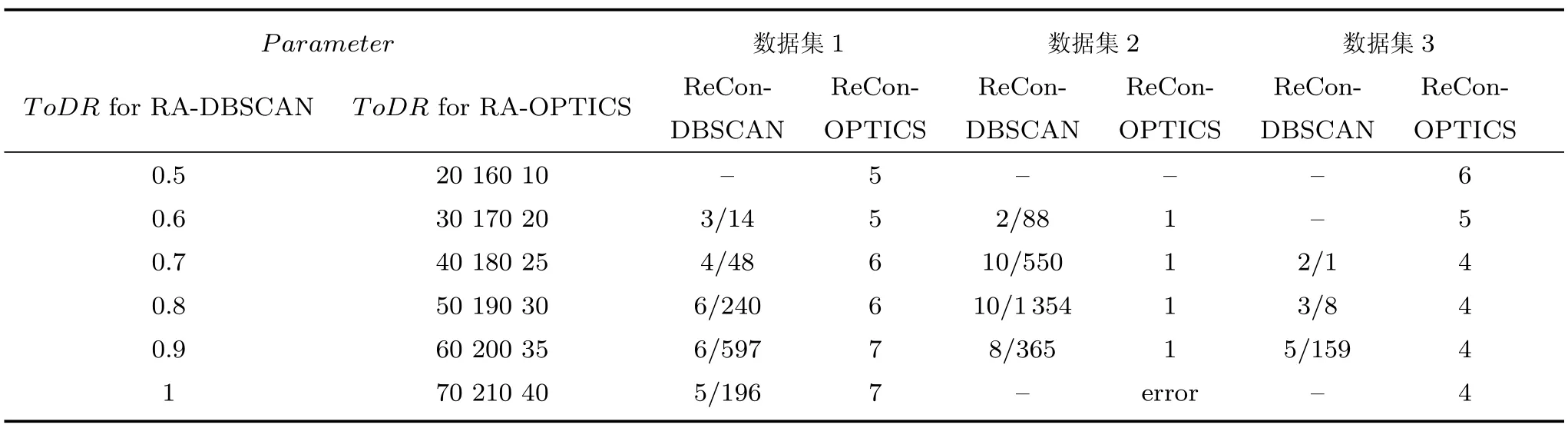
式(2)的密度矩阵中,列数m代表数据集的点对象,行表示根据点集的分布而规划的k个半径距离.具体地说,在矩阵元素中,xm表示点对象,rk表示该研究点的密度度量是在以半径为rk下的开圆中,其中r1 在数据集的距离矩阵内,所有距离元素在长度范围下的数目分布中,其波峰一般不少于一个.这表明,多个波峰与波谷的存在形式使距离矩阵的数据密集程度具有较强不确定性,不能简单地通过数据边缘或中心分布确定距离集合具备正态分布、卡方分布、t分布等分布曲线形态.为有效确定数据集内点与点间的距离分布情况,提出半径获取策略(Radius obtaining strategy). 该策略的主要思想是:自顶向下,逐渐细化分割,删去距离为空的范围. 如图5∼6 所示,在数据分布中有簇A 与簇B,共计距离45 个.其中簇内距离21 个(实线),簇间距离24 个(虚线),一般地,簇内距离小于簇间距离.设置一条标准线作为基准,将距离元素的分布划分为稠密处与稀疏处.稠密处为波峰1、2,分别汇聚了簇内点的相互距离元素,以及簇间的距离元素;波谷1 处存在极少该范围内的距离.取出波峰1,执行同样步骤,划分若干区间后重新制定新的标准,将波峰1 划分为子波谷1、子波峰1、子波谷2;持续以上工作,直至波峰波谷细化完毕,最终确定若干区间,并确定区间内平均值的大小. 图5 点集内的距离关系Fig.5 The relationship of distance within the point set 算法1.半径获取策略 输入:距离矩阵dist1×t. 输出:有效半径集合Radius. 步骤1.数据预处理.加载数据集,并置入集合OriginalDist.在获取原始数据的欧氏距离后可将向量转化为式(1)的距离矩阵. 步骤2.算法背景说明.设OriginalDist最大元素MaxDist,集合元素数目num,区间 (Range)数目RangeNum,则步长StepSizeMaxDist/RangeNum.制定一个标准StandardScore,该标准表示每个区间平均应具有多少个距离元素.如MaxDist100,若区间数目为5,则以步长20 为单位,划分区间分别是(0,20],(20,40],(40,60],(60,80],(80,100],若共有距离数目为100 个,则StandardScore为20. 步骤3.区间统计.遍历集合,逐一统计区间内元素的数目. 步骤4.核心计算.在扫描区间时,1)遴选区间;2)确定波峰波谷线.当扫描区间内无元素时,直接删除该元素数目为零的区间.当扫描区间内包含元素时,逐一计算区间的得分: 图6 距离元素分布的划分过程Fig.6 The division process of distance distribution 若得分高于标准值StandardScore,则记录并扫描下一区间,直至遇到低于标准值区间(或元素为零区间)而终结.合并以上区间为一大区间(Combined range),确认为波峰(波谷),并计算、标记该大区间得分score. 定义一个得分矩阵Score,该矩阵接收核心方法的返回结果.得分矩阵每一行表示一个大区间,矩阵序列SEQ作为标识自动生成,lb(Lower bound)、ub(Upper bound)分别表示区间的下界与上界,布尔类型数据根据该区间得分高于或低于标准而确定,score表示该区间的分数. 至此,通过第一步划分,得到了cr个新的区间,记为RangeSecond.其中,每个区间代表一个波峰或波谷,并且有一个得分,得分越高表示该区间内关于距离的元素更加密集. 步骤5.分区细化.自顶向下的思想是在步骤4的粗略划分基础上,按相同的方法继续细化. 步骤6.按得分比例,分配式(2)中的k. 通过上述工作,获得集合Radius,并完善式(2). 半径获取策略分为三部分,首先确定在每个区间内的距离数目,其次确定距离出现频率的波峰波谷;最后执行距离的细化.通过算法1,能获取针对数据集的几组重要距离值,并记录在式(2)中. 覆盖模型的思路是指在Radius下的相邻有效半径构成的覆盖区域能够覆盖整个点集的情况下,计算覆盖多维体数目的比值.具体地说,点集覆盖模型给出了点集与Radius相邻半径的描述关系. 2.3.1 覆盖多维体 定义4.覆盖多维体(Covering multidimensional cube).覆盖多维体是指能够覆盖在点集欧氏空间Rd的一系列多维体,表示为CMC(r).点向量为二维时,覆盖多维体为开圆;点向量为三维时,覆盖多维体为开球. 如点集为二维向量,目标点x为(d1,d2),则空间内该点覆盖多维体涵盖的范围是以半径r形成的一个圆,范围内的点符合;点集向量为d维,则空间内该点覆盖多维体涵盖的范围是以半径r形成的多维空间,范围内的点 讨论1.覆盖多维体的覆盖原则. 覆盖原则为分割覆盖(Division cover),这是由于点分布的无序性造成的. 若覆盖多维体占据的空间为Space,则在点集中可寻找若干类覆盖多维体:space1,space2,···,spaces使: 其中任意覆盖多维体space可由若干半径较小的子覆盖多维体(SubSpace)构成,需要满足: 覆盖多维体与覆盖原则如图7 所示. 在图7 中,通过不同种类覆盖多维体,使点集中的大部分点(除孤立点外)均被覆盖.图7 中的覆盖结果属于多种覆盖方法的结果之一. 需要注意的是:分割覆盖原则使原先半径为r1,r2的覆盖圆分割为若干小的覆盖圆,图7 中被覆盖多维体划分后的点集被多种类型的覆盖圆C覆盖.若规定则该点集由确定的两类覆盖多维体CMC1,CMC2覆盖. 通过引入覆盖多维体的相关概念,针对簇内孤立点的判定问题提出如下的解决思路. 目标问题:在密度矩阵中,确定并选择合适的一至多种密度,或确定多种密度间的关联,使推导出的参数在输入至DBSCAN 算法后能够有效聚类,并甄别孤立点. 转化结果:如何选择半径,使其构成的覆盖多维体在覆盖点集的条件下密度达到最高. 思路正确性探究:将点集P视为含有多种密度混合的数据集根据密度矩阵性质,不同密度的覆盖多维体数量具有递减性,即并且每一个密度具有相对应的半径r,二元组(ρδ,rn)展示了该半径下密度分布的主要区间.因此,点集存在等式:该等式由各类半径构成的覆盖多维体组成.其中,m为点的数目,(Sr·ρr)为该密度覆盖多维体内点的数目,nr为对应覆盖多维体数量.因式项1 为点集中大部分正常点所占空间,因式项2 为松散或孤立点所占空间.考虑因式项1 作为主要研究目标,使该组合达到数量nr最小,密度ρr最大.为选择合适密度,或确定密度间关联,需要分析不同覆盖多维体数目的关系. 讨论2.点集空间能否被一类以上的覆盖多维体覆盖. 引理1.设点集P在Rd中是有界闭集,C是覆盖多维体集合,且C 覆盖了点集P.则在点集P中必存在有限个覆盖多维体CMC1,CMC2,···,CMCs,同样完全覆盖点集P. 解释:1)条件中,C 覆盖点集P,指,存在覆盖多维体C,使得(r).2)C 是指欧氏空间中的一系列邻域,如0,1,2,···,N},实际就是覆盖多维体下的不同半径集合Radius. 引理的证明与有限覆盖定理 (Heine-Boreltheorem)证明相似,本文不再证明.最终可得到不同半径集合Radius可覆盖点集P所在空间的结论.因此需要讨论半径集合Radius中不同半径覆盖点集的能力. 讨论3.覆盖点集空间时,半径应满足的条件. 在半径r较小的条件下,覆盖多维体能够完全覆盖点集,有n·πr2np.若存在,则存在由此同样能够实现点集的空间覆盖,这不仅表明覆盖多维体的覆盖结果是多样的,同样证明了当半径r小于某一条件时,点集会被覆盖多维体完全覆盖. 图7 覆盖多维体分割覆盖原则示意Fig.7 The example of division cover in covering multidimensional cube 设点集P在所处欧氏空间的任意维度dimensiond的最大最小值分别为MaxVd,MinVd,则认为P在该维度下的值域为[MaxVd,MinVd].因此,d维空间的每一维度下均有范围为[MaxVd,MinVd]的多维欧氏空间. 当存在多维体,半径R,且0 1)当r1/2Max(MaxVd−MinVd),则Spacecmc ∩SpacepSpacep,表示该多维体能覆盖点集空间. 2)当1/4Max(MaxVd−MinVd)≤ r <1/2Max(MaxVd−MinVd),则2· Spacecmc ∩SpacepSpacep,表示两个多维体能覆盖点集空间. 3)当r <1/4Max(MaxVd−MinVd),或1/4Max(MaxVd−MinVd),则n·Spacecmc∩SpacepSpacep,表示n个多维体能覆盖点集空间. 其中Spacecmc与Spacep分别表示覆盖多维体与点集所占据的空间.且当半径r小于最大维度值域1/4 时,覆盖的密度更高,点集更加逼近P集合总数;为此,需要将计算的距离矩阵进行筛选,留取较小的点间距离,作为半径获取的学习数据. 这里将r的选择称为距离筛选(Distance filter),是ODIC-DBSCAN 的第一项输入参数,用来控制覆盖多维体的半径大小.通过讨论2,讨论3 可知,任意点集P可由一类以上的覆盖多维体覆盖,且为使覆盖密度更高,半径也应具备一定的条件.但点集被覆盖的方式具有多样性,第2.3.2 节将在满足点集被覆盖的条件下,对不同类型覆盖多维体的数目关系展开讨论. 2.3.2 点比阈值 若仅仅表述第k密度与第k+1 密度的关系,可以描述为以下一系列无差别曲线族,定义为E,k ≥0,其中E为常数.该曲线族描述了密度矩阵ρk×m相邻密度间的关系,如图8所示. 若设两类覆盖多维体的密度与对应半径分别为(ρ1,ρ2)与(r1,r2),则当两类覆盖多维体能够共同覆盖点集时,所满足的数量关系如图8 所示.在图8 中,设曲线上任意点p为二元组(1,r12,r2)构成,则图中p1与p2在覆盖点集效果中是等价的. 对U上的任意一点p,满足: 表示每一行密度矩阵的平均密度;其中等式左边第一个因式项表示以为密度,以rk为半径的圆总共覆盖的点数目;因式项2 同理.两个因式项之和等于点数目m.在这个约束条件下,需要掌握不同覆盖多维体的关系. 图8 无差别曲线族Fig.8 Indiscriminate curve 定义函数U以描述密度间的均衡状态,该均衡状态表示相邻半径间的偏向关系.函数U应具备以下两点性质:1)函数为单调减函数;2)函数图像为下凹形状.这两点性质符合无差别曲线的特性,并以反比关系的形式展现. 函数U是y1/x,(x>0)的形式,形态即以原点为对称,反比函数双曲线的上部分.从函数的构成上,可以发现的系数为一对参数(µ,ν),该参数考虑了点集密度对相邻半径ri,rj的偏向性.如在图8 中,µ较大时,曲线偏向于n(ri);ν较大时,曲线下凸则偏向于n(rj).参数通过寻找排序后密度矩阵的相邻密度差值最大的点,并返回其排序序号获取,表示为式(10): 为求多元函数(9)在约束条件(8)下的极值,引入拉格朗日乘子法,将2 个变量与1 个约束条件的最优化问题转为2+1 个变量的无约束优化问题.在本例约束优化工作中,构造拉格朗日函数: 其中,L为构造的拉格朗日函数,U为待求优化问题,λ为拉格朗日乘子,为式(8).通过引入函数U,Ψ 拉格朗日函数为: 对式(15)的研究从以下几点分析. 当点集存在k层密度曲线,即k个无差曲线族时,则相应会出现k−1 个相邻的点比阈值,称为点比阈值组(Group of point ratio thresholds,GPRT). ODIC-DBSCAN 算法的核心思想是将点比阈值组作为算法的考察阈值,确认核心对象在规定的两个半径内密度变化是否大于阈值,如果密度变化大于规定阈值,则说明该点外围的点较多,该点并非处于簇边缘;反之则证明该点处于簇边缘部分,因此不必将其纳入扩充区域,也不必将其标记为该簇.因此重定义的核心对象如下: 定义5.核心对象(Core object).若以xi为研究对象,在集合Radius中相邻半径rα,rβ下点的数目之比大于预处理的点比阈值,则称xi为核心对象. 在任意非均匀分布点集下,无论是否存在模糊边界,当限制条件(如原DBSCAN 中的epsilon与MinPts,或本文提出的点比阈值)逐渐步进时,簇间会渐渐产生靠拢、聚合的现象,直至最终汇聚为一个簇.该现象被称为簇的融合.簇的融合将模糊边界融聚在一起,因此难免会对簇的聚类结果产生误判.因此孤立点判定方法需要不断循环、步进点比阈值,直到簇发生了融合现象,便停止迭代.此时对没有簇号的点,可记为孤立点.在检测方法中,包含两个步骤: 步骤1.通过算法3 确立点集存在的簇群. 在簇群的建立工作中,给定一个有效点阈值(Effective Points Threshold),表示没有簇编号的点(孤立点)占点集数目的比值,若高于有效点阈值,则确定簇群建立成功,否则失败(可参照附录算法3). 有效点阈值Effective Points Threshold是ODIC-DBSCAN 算法的第二个参数.该阈值的取值完全是有限的,可每隔十个百分点取一数值.实际上,阈值的大小规律是有迹可循的,簇的紧密程度与该值有明显的关联:当簇的分界清晰,(Effective Points Threshold)取90% 依然无误;当簇间模糊,点分布无明显规律,则将该参数调至50% 以下即可. 步骤2.迭代执行ODIC-DBSCAN 算法,每次增加不同半径下点数目的比例,直至发现簇产生融合现象时停止. 孤立点的检测关心首次确立的簇群是否发生了融合现象,如果没有发生融合,则记录相关数据,循环算法;否则返回上一次的IDX,作为聚类的最终结果.算法通过获取并匹配IDX的分布,确认簇是否发生融合,并返回结果.其流程如图9 所示. 图9 孤立点检测流程Fig.9 The procession of outlier detection 程序结构被分为以下几个部分:1)距离矩阵;2)筛选符合要求的距离;3)半径获取策略;4)密度矩阵;5)计算点比阈值;6)ODIC-DBSCAN 算法. 1)距离矩阵时间复杂度为O(n2). 2)筛选符合要求距离的时间复杂度为O(n);遍历距离一次,找出符合要求的距离点并组成数组. 3)半径获取策略的时间复杂度为O(n);且此时n已远小于“筛选符合要求距离”中的n,其时间主要消耗在选定区域内的距离数量中. 4)密度矩阵时间复杂度为k·O(n).其中n为点集规模,k为集合Radius中有效半径的数目. 5)计算点比阈值,线性时间复杂度. 6)ODIC-DBSCAN 算法时间复杂度为k ·O(n).实际上,距离矩阵作为参数直接传入DBSCAN,无需重复计算.O(n)为对n个点进行遍历,寻找密度相连的点;k为外层循环,循环体为点比阈值组. 通过以上分析,ODIC-DBSCAN 算法时间复杂度的数量级与DBSCAN 相同,均为O(n2). 本文实验分为三个部分:第一部分为半径获取策略的效果展示;第二部分为ODIC-DBSCAN 的性能测试:包括在UCI 真实的高维数据中检测参数敏感性与时间效率;第三部分为簇内与簇间孤立点检验效果对比. 实验将DBSCAN、AP、DPC、ReCon-DBSCAN、ReCon-OPTICS 作为簇内孤立点检测的对比算法;此外,将LDOF、F-ABOD、LOF 以及OPTICS 四种算法作为簇间孤立点检测性能的对比算法,并使用公开数据集与模拟数据集.在性能测试与簇间孤立点检测中,选择UCI 公开的3 个真实数据集与聚类公开的3 类benchmark;在簇内孤立点检测中,制定了相应的模拟数据集1∼3,其数据分布将在对应部分给予说明. 在验证半径获取策略的方法上,两个具有代表性的数据集.图10(a)含有两个簇,且距离差为2.图10(b)含有三个簇,其左下方两个簇与图10(a)相同,最远两个簇之间距离差为10.图10 中每个簇包含100 个点,且均以随机数的方式生成. 图10 构造数据集散点图Fig.10 The constructed point sets scatters 通过图11,可以观察距离的数目与其值的关系,该图是由算法产生1×2 000 的矩阵DistRatio构成的.图11 中在1∼2 的距离内,有一个明显的直线上升.其中,在上升段的左侧,是两个簇内各自点之间的两两距离;在上升段的右侧,是两个簇之间的相互距离.左右之间的上升跃进是半径获取策略的主要作用,屏蔽了一些“没有作用”的距离,这些距离会使算法产生大量的冗余,因此半径获取策略将这些距离筛选、排除.相应的统计下,在0∼1 范围内,划分出的距离数目为950 个;在1∼2 范围下,算法划分的距离数目86 个;而2∼3 下,数目为661个,3∼4.5 中,距离数目为430 个. 图11 数据集1 下的距离分割Fig.11 The distance division of point set 1 图12 为分割图10(b),算法划分的距离产生的结果.图中的划分出现了多层梯度,按从低至高的顺序,梯度的解释如表1 所示. 表1 梯度含义Table 1 The meaning of gradient 通过图11、12 的数据,可验证半径获取策略能够选择适应于数据集的几组重要距离,输出的结果也具有针对性. 本节将对ODIC-DBSCAN 的性能做一些典型测试,包括1)参数敏感性分析;2)运行时间分析.数据集的采用说明如下: 1)实验选择UCI 公开的数据集(http://archive.ics.uci.edu/ml/datasets.html):Banknote Authentication (BA)、Chess 与Breast Cancer Wisconsin (WDBC).在三类数据集的预处理中采取同样的方法:删除反类中(孤立点类)绝大部分数据,仅保留10 条反类样本作为孤立点进行检测.三个数据集的样本数目与维度分别为:772 ×4、1 679×36、367 ×30. 图12 数据集2 下的距离分割Fig.12 The distance division of point set 2 2)在时间分析中,选择聚类的三种benchmark(https://cs.joensuu.fi/sipu/datasets),分别测试不同规模,不同簇数目,以及不同维度下的运行时间. 3.2.1 参数敏感性分析 ODIC-DBSCAN 参数为:1)距离的筛选条件;2)簇形成时的簇阈值.通过3 类数据集,在控制两类参数的情况下,分析数据集产生的孤立点数目. 表2 展示了在真实的高维数据集下,调整不同参数下的孤立点检测结果.从表中数据可知,ODICDBSCAN 在不同参数的影响下,对数据分析较为稳定,检测结果对参数并不敏感. 分析可知:1)距离筛选参数将距离细化后再选择数据集中重要半径,但对不同数据集有不同的要求.如数据集2,当半径为最大距离的1/5 时,由于半径过小,则不能产生聚类效果.2)有效点阈值参数对结果的影响是具有规律的,该参数表示高于有效点占全局点的比例时,簇的产生生效.因此可以发现,随着该参数的增加,孤立点在不断减少,而到达一定程度时,结果将保持不变;在该情况下,产生的孤立点数目是稳定且可靠的. 另外,当有效点阈值降低时,孤立点数目增长.实际上,有效点阈值降低时,簇发生了融合,而较多被检测的孤立点来源于簇之间的边缘点对象.这说明ODIC-DBSCAN 对图1 中的现象1 和2 具有检测效果. 3.2.2 算法运行时间分析 算法的时间性能关系到应用效率.本节选择了:1)三类benchmark,包括不同规模,簇数目以及维度的数据对象;2)两种密度聚类算法(DPC 与AP算法),使之作为对比方法,并控制迭代次数. 1)不同规模 图13 展示了不同算法在不同规模数据集下的运行时间.DPC 算法的运行默认自动选取所有的簇心,并无需迭代,算法执行仅需要计算每个点的局部密度,并寻找该点范围内更高的局部密度对象即可.而AP 算法虽然执行时间有限,但为获得聚类中心的收敛,需要不断迭代.ODIC-DBSCAN 虽然需要进行外层循环迭代,不断遍历全局点,并根据核心对象条件执行扩充方法;但是该方法在预处理中选择了针对数据集的重要半径,因此时间低于AP 算法. 2)不同簇数目与不同维度 在不同簇数、维度的数据下,各类算法的运行时间如图14、15,且三类benchmark 在数据规模上相同. 从数据中可以观察到,最为重要的变化是ODIC-DBSCAN 的速度在簇数目与维度的benchmark 中得到了极大的提升,这主要是因为数据的分布对算法具有较大的影响.因此在相同规模下,数据的分布对运行时间的影响不可忽略.在图13的数据中,分布总是包含95 个簇,形状复杂;因此ODIC-DBSCAN 在运行时需要考虑任意两个簇之间的距离问题,运行时间较长;而在图14 中,每个benchmark 对应的簇数目较少,分布较简单,运行时间也较短. 为了更清晰地观察算法在运行时间的细节,启用了MATLAB 时间运行探查器.在此对比图13 中数据量为5 000 的数据集,以及图14 中簇数目为5的数据集;两个数据集的点数目完全相同,但数据分布不同;另外,控制迭代的次数为1 次. 从表3 中可发现,在同样规模的数据集下,由于数据分布不同,算法运行的时间也受到了影响.通过表中数据,可知时间主要消耗在“合并邻居”这一条命令行中(算法2 第20 行).该行代码负责扩展簇,即确定一个核心对象后,寻找其邻居,然后将寻找邻居返回的结果继续作为输入,并继续寻找邻居,直到结束条件.可以发现,簇的数目较多时,合并的次数也较多,但算法时间消耗也随之上升,这是因为原邻居数组的长度与新纳入的点数组长度都有所增加,合并数组的时间消耗也大幅度增长. 表2 距离筛选与有效点阈值的敏感性测试Table 2 The sensitivity of distance filter and effective points threshold 表3 ODIC-DBSCAN 在相同规模不同分布的数据集下时间运行细节Table 3 Time details of ODIC-DBSCAN on the point sets that have same scale but different distributions 图13 不同算法在不同规模benchmark 下的运行时间Fig.13 Time of algorithms on scale benchmark 图14 不同算法在不同簇数目benchmark 下的运行时间Fig.14 Time of algorithms on cluster benchmark 图15 不同算法在不同维度benchmark 下的运行时间Fig.15 Time of algorithms on dimension benchmark 在本节中,与基于密度聚类的方法进行对比,使用DBSCAN、AP、DPC、ReCon-DBSCAN、ReCon-OPTICS 五类算法在参数不同的情况下分别检验其是否能检测出预设的孤立点,并与ODIC-DBSCAN 进行比较. 1)HR(Hit rate).该值表示算法的命中率.设点集P中所有孤立点构成集合Outliers,二值算法检测出的孤立点为集合DOb(Detected outliers of binary results),非二值检测出的孤立点为DOnb(Detected outliers of non-binary results),则 2)SRoPO(Sum rank of pre-set outliers). 定义6.预设孤立点排序和(SRoPO,Sum rank of pre-set outliers).设点集P内包含no个孤立点,非二值检测算法中任意点与其离群程度构成二元组,将P内所有点按outlier−ness由高至低排序,则任意点均包含孤立程度的排列序号ranki;此时有SRoPO 表4 展示了第3.3.1 节与第3.3.2 节特殊符号的意义. 表4 特殊符号与其意义Table 4 Symbols and its meanning 3.3.1 簇内孤立点检测对比 数据集设计:为了检验ODIC-DBSCAN 在上述条件下的簇内孤立点检测效果,重新制定了三个模拟数据集,该数据集的形态如图16 所示. 图16 构造数据集Fig.16 Construction of point sets 在图16 中,外圆是点集的范围,在圆内设置一内接矩形,矩形内部安置了密集的数据,矩形外部与外圆间安置了松散的数据.数据集1)外圆处点527 个,矩形内部安置点5 082 个,将范围1 下的点清除,并添加点(0.025,0.025).数据集2)外圆处点546 个,矩形内部点14 385 个,将1∼5 范围内的点清除,添加点{(0.025,0.025),(−0.725,−0.225),(−0.775,0.225),(0.775,−0.225),(0.775,0.225)},数据集2 共计点15 266 个.数据集3)外圆处点557个,矩形内部19 776 个点,该点集的处理方式与点集2 相同,共计点20 078 个. 1)ODIC-DBSCAN 图17∼19 展示了ODBC-DBSCAN 在模拟数据集1∼3 中的结果.观察图17 结果可发现,聚类将密集区的点聚合出来,稀疏点输出为孤立点.在数据密集区中,由于存在点5 552 个,与挖空区域面积(0.025)相比,数据集的点依然有相对稀疏的特性,因此算法产出了与预设孤立点相近的点. 图17 数据集1 下的ODIC-DBSCAN 算法结果Fig.17 Results of ODIC-DBSCAN in point set 1 图18 数据集2 下的ODIC-DBSCAN 算法结果Fig.18 Results of ODIC-DBSCAN in point set 2 图19 数据集3 下的ODIC-DBSCAN 算法结果Fig.19 Results of ODIC-DBSCAN in point set 3 这些孤立点的环境相仿,与周围均有不同程度的空白,因此聚类结果将他们分离出来.图18 中,ODIC-DBSCAN 算法不仅提供了正确的聚类结果,同样分辨出六个孤立点.这六个孤立点中有五个是预先设定的,另外一个在簇的边缘处.这说明随着簇密集程度的增加,孤立点的分割也显得越来越清晰.在图19 中,数据集3 密集区的密度更大,在此情况下,设定的五个孤立点较为明显.从聚类结果可以看出,ODIC-DBSCAN 在高密度下识别出了簇与五个孤立点. 2)DBSCAN 图20 展示了在不同参数(不同MinPts)下模拟数据集1∼3 的DBSCAN 聚类结果.DBSCAN在不断调参(控制epsilon不变,调整MinPts)后,三类数据集均产生了分裂的现象.当数据密集区越为紧密,裂变的效果越明显.这是因为DBSCAN 的核心注重簇的扩充,而由于MinPts条件限制,导致密集区被分裂为多个簇.而在这之间,预设的孤立点始终不能被检测出,这是因为算法仅能接收一种密度条件.而ODIC-DBSCAN 具有较强的检测能力,是由于我们对DBSCAN 算法的核心对象重新进行了定义,优化了簇扩充的条件,从点的数量,转移到点周围密度的变化.不仅如此,ODIC-DBSCAN 算法能够自学习整个点集中的密度分布,提供合理的距离测试与密度变化.通过以上支持,使孤立点的检测结果较为理想. 3)DPC 与AP DPC 与AP 聚类下对孤立点的识别结果如表5 展示.DPC 算法中,选择ρ较小,δ较大的对象为孤立点.在分析中,选择排序后的ρ/δ最小的n个值作为分析对象.其中position表示预设的孤立点的ρ/δ值在正常点内的排序号码.另外,CORE表示属于每个簇的点数目.其次,有另外一些点在CORE 集合的边缘处,这些点被称为HALO. 实验发现,调节per在1%∼2%区间内,算法明显产生了两个簇心;算法将高密区域分为不同的部分,而非一个整体.这说明DPC 算法对参数是敏感的,首先受限于参数per的调控,不同的截断距离dc(Cutoff distance)将数据的密度状态划分为不同的结果;其次是簇心的选择,完全改变了聚类结果.在该实例中,发现高密与低密区域的界限很难区分,而仅用HALO 表述,说明算法的参数不能很好地适应不同密度下的数据集聚类结果.也因而未能有效检测预设孤立点.另外,DPC 算法能检查簇间孤立点,但是对簇内孤立点难以检测;这同样是因为dc对检测具有大的干扰,因为该值极大地影响了局部密度,由于簇内不同的点密度差较小,因此对该值的敏感很高.而AP 算法的本质是不断更新、计算相似度矩阵中每个点的吸引度信息与归属度信息,并寻找簇中心的过程;因此设置的模拟数据集在簇的划分上具有对称与均匀的特性;由于算法在迭代中检查聚类中心的变化,因此对簇内的孤立点并不敏感.实际上,在低密区域设置的孤立点也被纳入了正常簇中.AP 算法在点与点的信息传播中具有很强的特性,但是在孤立点的判定中,边缘点由于对簇内点具有归属度,因此容易被纳入在簇的内部. 表5 DPC 与AP 在模拟数据集1 ∼3 的检测结果Table 5 Detection results of DPC and AP on synthetic point sets 1 ∼3 图20 不同参数下对模拟数据集1 ∼3 的DBSCAN 聚类结果Fig.20 DBSCAN Clustering results of point sets 1 ∼3 with different parameters 4)Re-Con DBSCAN 与Re-Con OPTICS 表6∼7 展示了基于密度比方法中的Re-Con DBSCAN 与Re-Con OPTICS 算法在Synthetic1-3 数据集中的检测结果.该方法是由于Reconditioning approach 提供了一种基于密度比的策略,与本文提出的ODIC-DBSCAN 具有相近之处.表中参数为该方法的输入,参数对表示构造密度比所需的不同大小半径. 从表6 中的数据可知,算法在不同参数的影响下效果不同,随着阈值的增加,检测出的孤立点数目也逐渐增加,且对预设的簇内孤立点有一定的鉴别能力.这是因为该方法采用的密度比思想能够针对不同密度抽取不同的密度阈值,并能够阻隔多重密度带来的干扰;但是,该方法对参数具有依赖性,体现在表中相同数据集下不同参数的结果.另外,由于预设的簇内孤立点空间空白区域较小,且受到密度稀疏区域的干扰,因此给定的密度阈值不能满足簇内孤立点密度的特殊条件. 在表7 OPTICS 密度比算法中,ToDR表示算法构造的两层范围下近邻数目之比,因此约定内层范围邻居数目MinPts为8,则ToDR10 时,外层范围邻居数目为80.对数据集1∼3,构造的密度比阈值ToDR越大,命中率HR越大,这是因为当构造的两层范围间密度差越大时,低密区域的孤立点越容易被检测.另外,命中率涨幅由快变慢,这是由数据的分布造成的,模拟数据集的密度大致有两类,因此涨幅在ToDR为10∼30 间变化后,孤立点检测能力的增加逐渐变缓. 对比表6 与表7 可发现,OPTICS 的密度比算法对簇内孤立点并不敏感,若将密度比阈值增加,预设的簇内孤立点与周围点的密度因为不满足较大的阈值而被算法忽略;若将密度比阈值减小,则模拟数据集的低密区域内部分点会被认作正常数据,导致算法检测能力降低. 3.3.2 簇间孤立点检测对比 本节为比较ODIC-DBSCAN 与其他几种密度聚类方法以及孤立点检测方法对簇间孤立点的检验能力,使用LOF、LDOF、F-ABOD 三类孤立点检测算法,与OPTICS、DPC、ReCon-DBSCAN、ReCon-OPTICS 四类密度聚类方法进行对比.在数据集的采用上,选择第3.2 节所述三类公开高维数据集.对比实验结果如表8 所示. 表8 展示了二值与非二值检测的六种方法在公开数据集1∼3 的检测结果.在非二值检测的四个方法中,LOF,LDOF 与F-ABOD 三类均为孤立点检测方法;而OPTICS 在密度聚类上有较好的效果.在二值检测中,选择了两类密度聚类方法用来检测孤立点. 不排除三类数据集本身具有较大差异,簇与簇之间的界限模糊的因素,总体来说在非二值方法下,随着参数k增大,检测的Top-10 结果具有上升或保持稳定的趋势.其中,LOF 与OPTICS 能检测出更多的点,且预设孤立点排序和(SRoPO)较低,说明其余未检测到的点的孤立程度也较接近最大的孤立值.LOFD 与F-ABOD 分别是在基于距离与角度的因素下对孤立点进行判定,检测的点数低于其他两类非二值检测方法.其中基于距离的检测方法在近邻参数的调整下检测结果并无较大差异,SRoPO也并非随k的增加而减少;这说明1)两类算法产生的结果对参数k略显敏感;2)检测结果与k难以成比例,获取最佳结果需要不断调试参数试验.而Chess 数据集中,数据的值分布仅为1∼7,且均为整数;因此,孤立点的检测难度较大.在非二值的四类方法下,检测结果未及数据集1、3 效果良好. 表6 Re-Con DBSCAN 算法在模拟数据集1 ∼3 的检验结果Table 6 Detection results of Re-Con DBSCAN on synthetic point sets 1 ∼3 表7 Re-Con OPTICS 算法在模拟数据集1 ∼3 的检验结果Table 7 Detection results of Re-Con OPTICS on synthetic point sets 1 ∼3 表8 六种不同检测方法在三类公开数据集上的对比Table 8 Detection results of six OD methods on three public higher dimensional datasets 表9 基于密度比的ReCon-DBSCAN 与ReCon-OPTICS 算法在三类数据集上的检测结果Table 9 Detection results of density-ratio based ReCon-DBSCAN and ReCon-OPTICS on three real-world point sets ODIC-DBSCAN 属于二值检测,仅对数据对象判定是否为孤立点,而非测定其孤立程度.对此,该方法显示出了较强的检测能力.如数据集1 中,当有效点阈值在5∼6 时,检测到的9 个孤立点中有8 个是预设的点.在较难检测的数据集2 中,与其他几类算法结果不同之处是,ODIC-DBSCAN 算法检测出了所有预设孤立点,但孤立点所在的簇中,同样包含126 个其他正常点.这说明,算法对孤立点的检测具有一定效果,同时可检测出的其余点(这些点可能是具有处于正反两类数据模糊边界的特性),ODIC-DBSCAN 善于捕捉类似的边界点,正如算法对两个簇在融合之时能够检测出簇间点一般.结合以上各类表的检测数据,可以发现在真实数据集中,ODIC-DBSCAN 对簇间的孤立点检测依然有效果,这是由于算法考虑了不同密度间的关联关系,用不同的关键半径对数据集进行聚类,因此算法普适性也较强. 针对传统孤立点检测方法忽略簇内孤立点的问题,提出了一种簇内孤立点检测技术ODICDBSCAN.该方法通过预处理工作与聚类算法的优化,能够检测出预置的若干簇内孤立点.算法首先依据数据集特性学习有效半径集合并构建密度矩阵;然后提出点集覆盖模型,利用拉格朗日乘子法求取极值,输出点比阈值;最后修改DBSCAN 的核心对象定义,将预处理结果与优化DBCSAN 算法相结合,当簇发生了融合现象时,输出孤立点检测结果.下一步将在此思想的基础上在广度与深度上进一步提出其他优化的方法.该优化包含两个方向:1)思想移植;2)效率优化.在思想移植中,工作目标致力于将自学习思想移植于其他相仿的聚类算法中,使算法对孤立对象具备敏感性;在效率优化问题中,需要进一步将预处理思路与其他聚类算法特性相接轨,在保证必备性能的基础上,正确检测簇内孤立点,使类似的检测方式更加活泛. 附录 算法2.ODIC-DBSCAN 输入.点集PPP,距离矩阵dist,点比阈值组GPRT,半径集合Radius 输出. IDX 算法主要体现在四方面(在附录处算法2 中分别标记为①、②、③、④).标记①(算法2、11 行)在DBSCAN 的基础上构建了一个外层for 循环,该循环的变量为前述算法规定的点比阈值组,即该点集中存在无差别曲线族的数目(一般在10 以内),该循环的作用是渐进地逼近簇的最大化.标记②(位于27∼31 行)为调用计算点数比的方法,所调用的函数为QueryRatio,是标记④的内容,计算了目标点不同半径下点数目的比值.标记③(位于19 行)修改了核心点的确认方法,原始方法通过确认该点邻居数目是否大于规定MinPts来判定是否将该点纳入扩充区域;标记③通过记录点j的点数比与约定的点比阈值关系确认是否能将点j纳入簇的扩充区域,修改了簇的扩充方法与原理. 算法3.簇群建立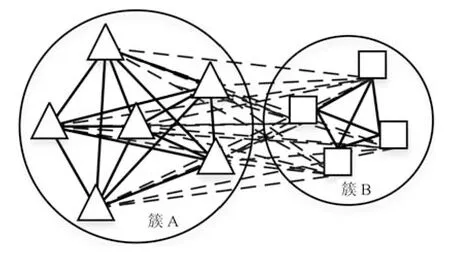

2.3 点集覆盖模型



2.4 ODIC-DBSCAN
2.5 时间复杂度分析
3 实验与分析
3.1 半径获取策略
3.2 ODIC-DBSCAN 性能测试

3.3 孤立点的检测与对比


4 结语